 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Neural Curiosity Enhances Learning Flexibility for Autonomous Goal Discovery
Nov 29, 2024



The autonomous learning of new goals in robotics remains a complex issue to address. Here, we propose a model where curiosity influence learning flexibility. To do so, this paper proposes to root curiosity and attention together by taking inspiration from the Locus Coeruleus-Norepinephrine system along with various cognitive processes such as cognitive persistence and visual habituation. We apply our approach by experimenting with a simulated robotic arm on a set of objects with varying difficulty. The robot first discovers new goals via bottom-up attention through motor babbling with an inhibition of return mechanism, then engage to the learning of goals due to neural activity arising within the curiosity mechanism. The architecture is modelled with dynamic neural fields and the learning of goals such as pushing the objects in diverse directions is supported by the use of forward and inverse models implemented by multi-layer perceptrons. The adoption of dynamic neural fields to model curiosity, habituation and persistence allows the robot to demonstrate various learning trajectories depending on the object. In addition, the approach exhibits interesting properties regarding the learning of similar goals as well as the continuous switch between exploration and exploitation.
AR-based interaction for safe human-robot collaborative manufacturing
Sep 06, 2019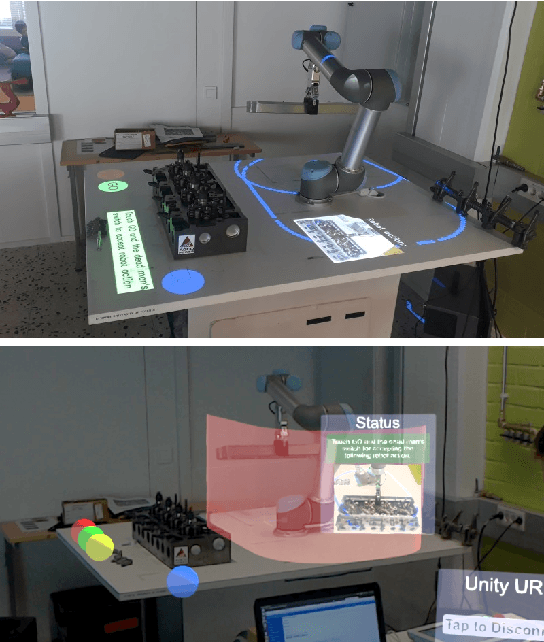
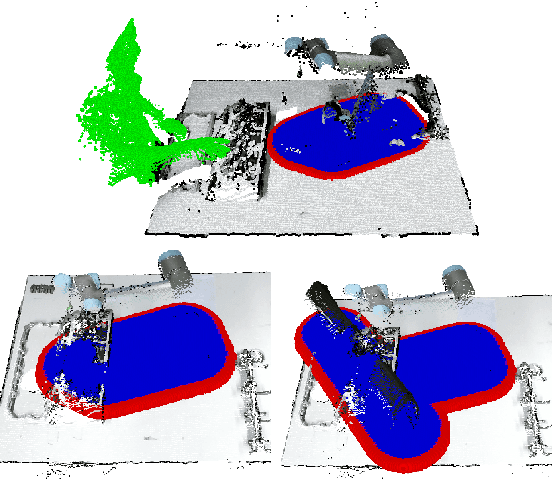
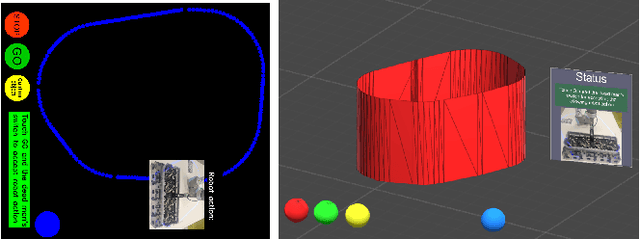
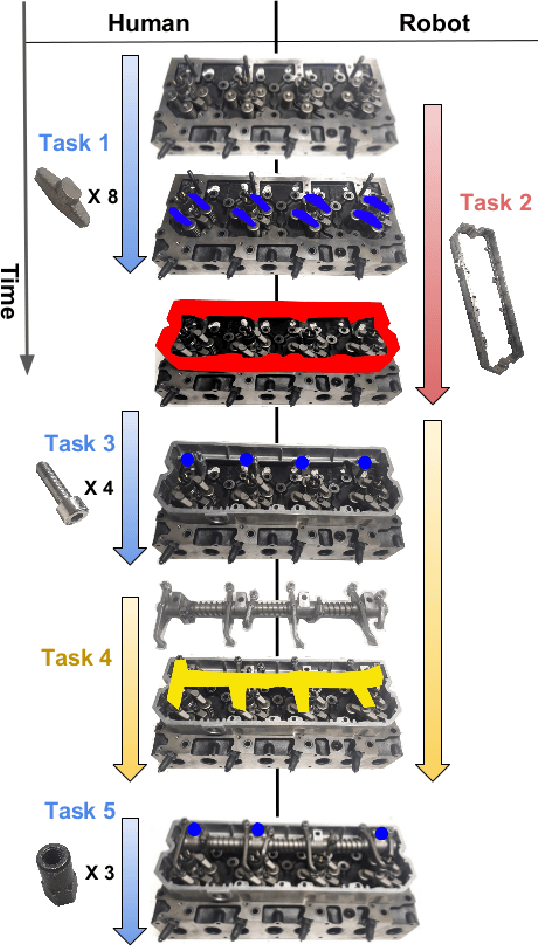
Industrial standards define safety requirements for Human-Robot Collaboration (HRC) in industrial manufacturing. The standards particularly require real-time monitoring and securing of the minimum protective distance between a robot and an operator. In this work, we propose a depth-sensor based model for workspace monitoring and an interactive Augmented Reality (AR) User Interface (UI) for safe HRC. The AR UI is implemented on two different hardware: a projector-mirror setup anda wearable AR gear (HoloLens). We experiment the workspace model and UIs for a realistic diesel motor assembly task. The AR-based interactive UIs provide 21-24% and 57-64% reduction in the task completion and robot idle time, respectively, as compared to a baseline without interaction and workspace sharing. However, subjective evaluations reveal that HoloLens based AR is not yet suitable for industrial manufacturing while the projector-mirror setup shows clear improvements in safety and work ergonomics.
Benchmarking 6D Object Pose Estimation for Robotics
Jun 06, 2019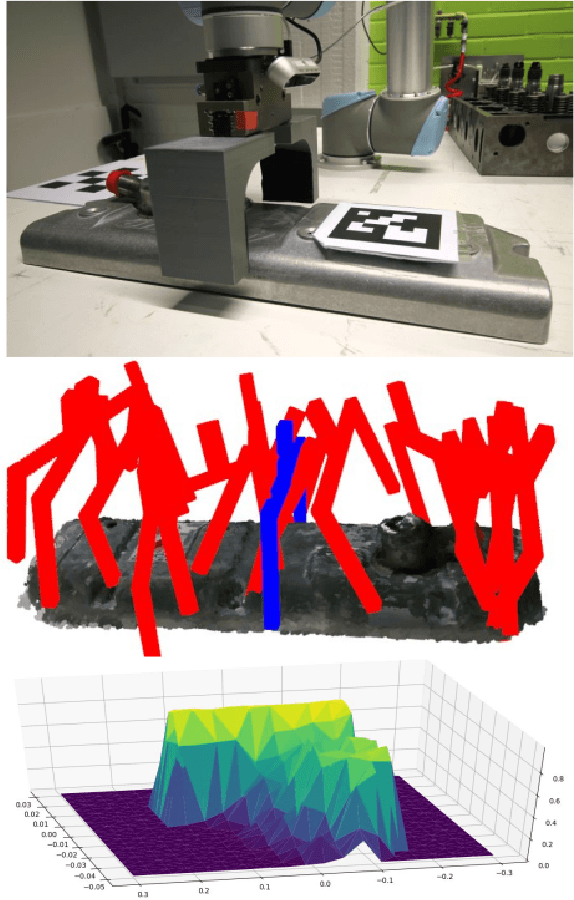
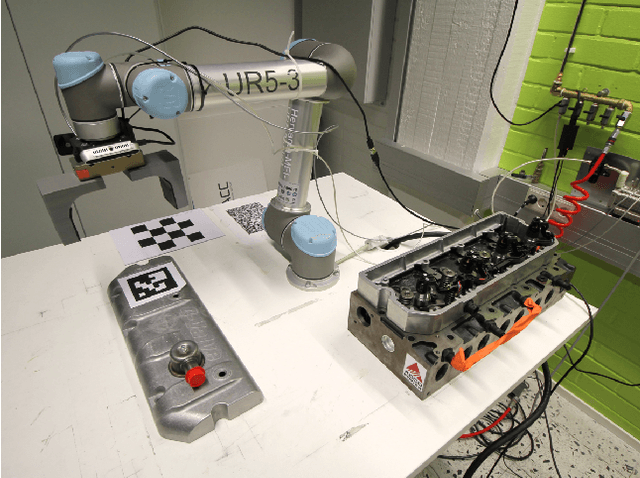
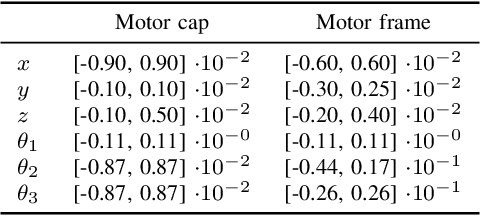
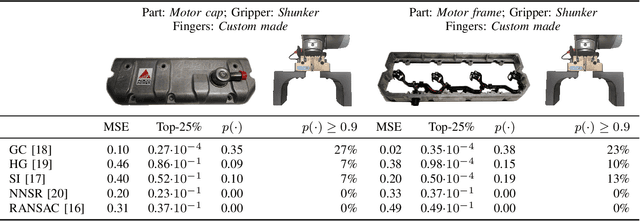
Benchmarking 6D object pose estimation for robotics is not straightforward as sufficient accuracy depends on many factors, e.g., the selected gripper, dimensions, weight and material of an object, grasping point, and the robot task itself. We formulate the problem as a successful grasp, i.e. for a fixed set of factors affecting the task, will the given pose estimate provide sufficiently good grasp to complete the task. The successful grasp is modelled in a probabilistic framework by sampling in the pose error space and executing the task and automatically detecting success or failure. Hours of sampling and thousands of samples are used to construct a non-parametric probability of a successful grasp given the pose residual. The framework is experimentally validated with real objects and assembly tasks and comparison of several state-of-the-art point cloud based 3D pose estimation methods.