 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking 6D Object Pose Estimation for Robotics
Paper and Code
Jun 06, 2019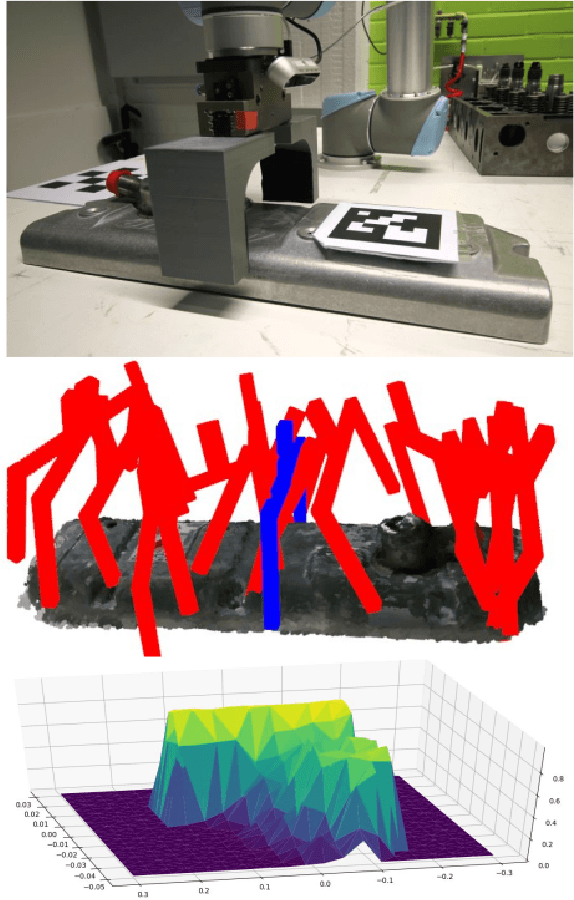
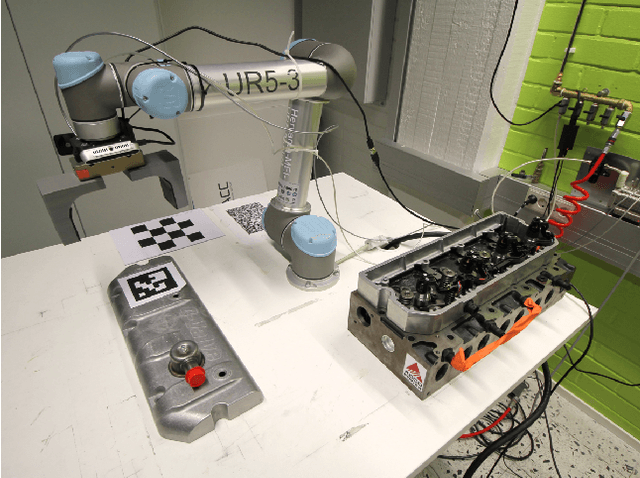
Benchmarking 6D object pose estimation for robotics is not straightforward as sufficient accuracy depends on many factors, e.g., the selected gripper, dimensions, weight and material of an object, grasping point, and the robot task itself. We formulate the problem as a successful grasp, i.e. for a fixed set of factors affecting the task, will the given pose estimate provide sufficiently good grasp to complete the task. The successful grasp is modelled in a probabilistic framework by sampling in the pose error space and executing the task and automatically detecting success or failure. Hours of sampling and thousands of samples are used to construct a non-parametric probability of a successful grasp given the pose residual. The framework is experimentally validated with real objects and assembly tasks and comparison of several state-of-the-art point cloud based 3D pose estimation methods.