 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferable End-to-end Room Layout Estimation via Implicit Encoding
Dec 21, 2021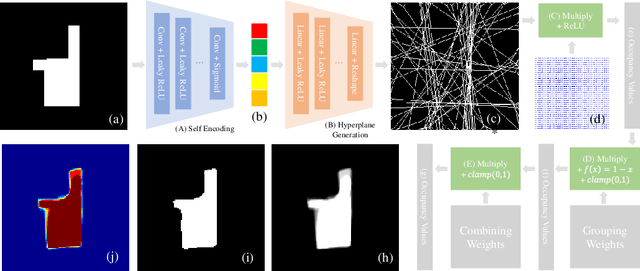

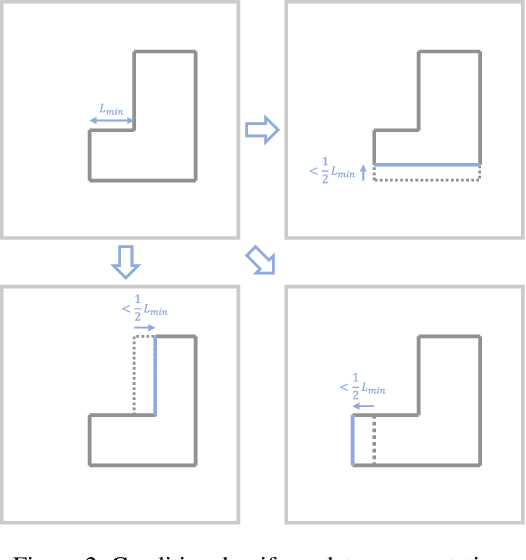

We study the problem of estimating room layouts from a single panorama image. Most former works have two stages: feature extraction and parametric model fitting. Here we propose an end-to-end method that directly predicts parametric layouts from an input panorama image. It exploits an implicit encoding procedure that embeds parametric layouts into a latent space. Then learning a mapping from images to this latent space makes end-to-end room layout estimation possible. However end-to-end methods have several notorious drawbacks despite many intriguing properties. A widely raised criticism is that they are troubled with dataset bias and do not transfer to unfamiliar domains. Our study echos this common belief. To this end, we propose to use semantic boundary prediction maps as an intermediate domain. It brings significant performance boost on four benchmarks (Structured3D, PanoContext, S3DIS, and Matterport3D), notably in the zero-shot transfer setting. Code, data, and models will be released.
Landmark Regularization: Ranking Guided Super-Net Training in Neural Architecture Search
Apr 12, 2021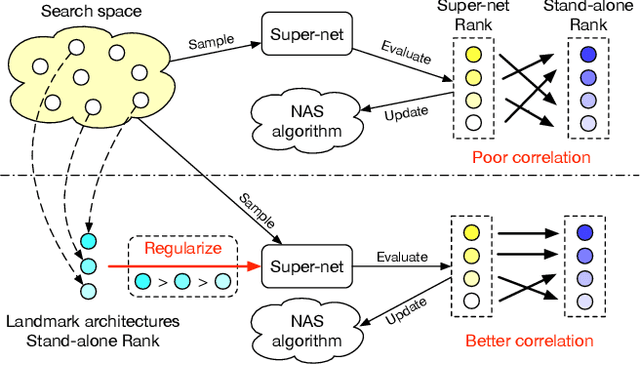
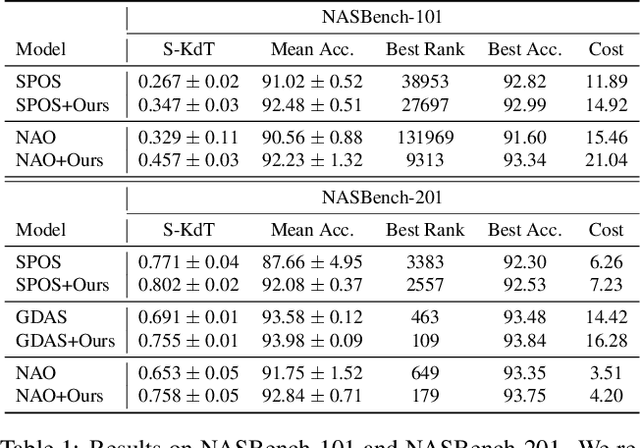
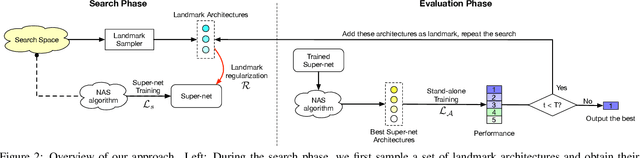
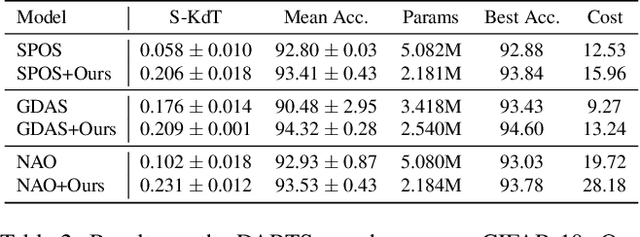
Weight sharing has become a de facto standard in neural architecture search because it enables the search to be done on commodity hardware. However, recent works have empirically shown a ranking disorder between the performance of stand-alone architectures and that of the corresponding shared-weight networks. This violates the main assumption of weight-sharing NAS algorithms, thus limiting their effectiveness. We tackle this issue by proposing a regularization term that aims to maximize the correlation between the performance rankings of the shared-weight network and that of the standalone architectures using a small set of landmark architectures. We incorporate our regularization term into three different NAS algorithms and show that it consistently improves performance across algorithms, search-spaces, and tasks.
High-dimensional Convolutional Networks for Geometric Pattern Recognition
May 17, 2020

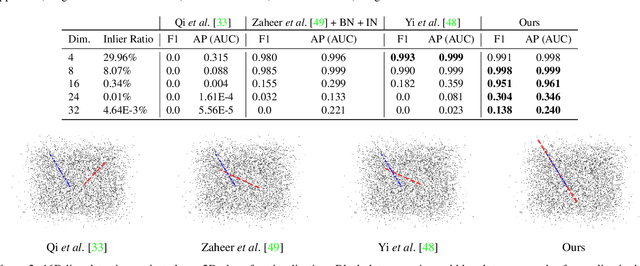
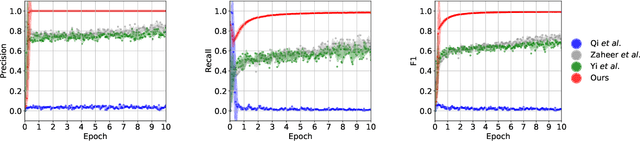
Many problems in science and engineering can be formulated in terms of geometric patterns in high-dimensional spaces. We present high-dimensional convolutional networks (ConvNets) for pattern recognition problems that arise in the context of geometric registration. We first study the effectiveness of convolutional networks in detecting linear subspaces in high-dimensional spaces with up to 32 dimensions: much higher dimensionality than prior applications of ConvNets. We then apply high-dimensional ConvNets to 3D registration under rigid motions and image correspondence estimation. Experiments indicate that our high-dimensional ConvNets outperform prior approaches that relied on deep networks based on global pooling operators.
How to Train Your Super-Net: An Analysis of Training Heuristics in Weight-Sharing NAS
Mar 09, 2020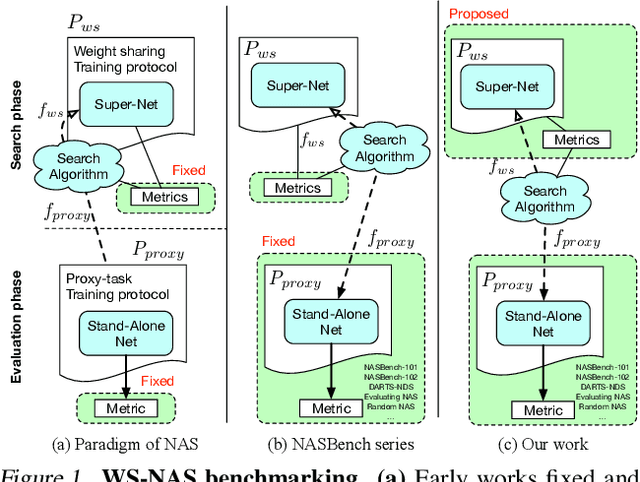
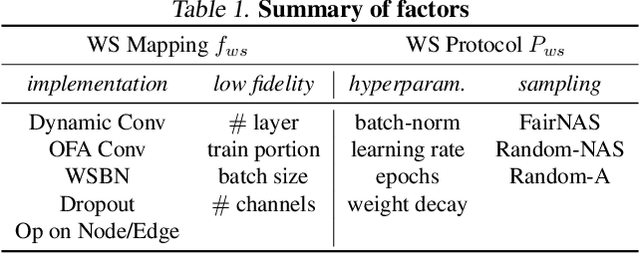

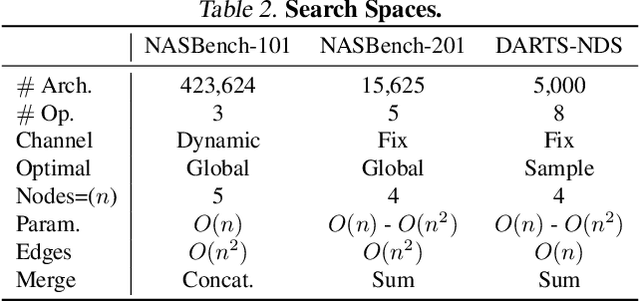
Weight sharing promises to make neural architecture search (NAS) tractable even on commodity hardware. Existing methods in this space rely on a diverse set of heuristics to design and train the shared-weight backbone network, a.k.a. the super-net. Since heuristics and hyperparameters substantially vary across different methods, a fair comparison between them can only be achieved by systematically analyzing the influence of these factors. In this paper, we therefore provide a systematic evaluation of the heuristics and hyperparameters that are frequently employed by weight-sharing NAS algorithms. Our analysis uncovers that some commonly-used heuristics for super-net training negatively impact the correlation between super-net and stand-alone performance, and evidences the strong influence of certain hyperparameters and architectural choices. Our code and experiments set a strong and reproducible baseline that future works can build on.
Deep Drone Racing: Learning Agile Flight in Dynamic Environments
Oct 09, 2018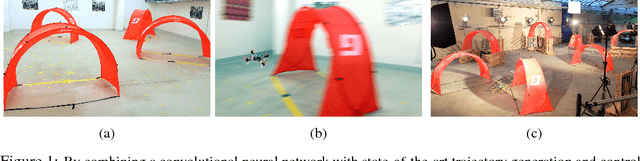
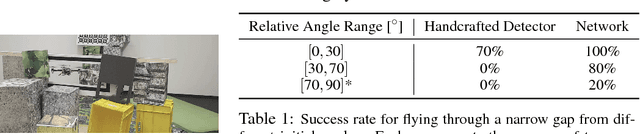

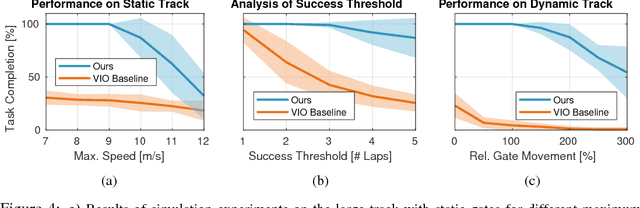
Autonomous agile flight brings up fundamental challenges in robotics, such as coping with unreliable state estimation, reacting optimally to dynamically changing environments, and coupling perception and action in real time under severe resource constraints. In this paper, we consider these challenges in the context of autonomous, vision-based drone racing in dynamic environments. Our approach combines a convolutional neural network (CNN) with a state-of-the-art path-planning and control system. The CNN directly maps raw images into a robust representation in the form of a waypoint and desired speed. This information is then used by the planner to generate a short, minimum-jerk trajectory segment and corresponding motor commands to reach the desired goal. We demonstrate our method in autonomous agile flight scenarios, in which a vision-based quadrotor traverses drone-racing tracks with possibly moving gates. Our method does not require any explicit map of the environment and runs fully onboard. We extensively test the precision and robustness of the approach in simulation and in the physical world. We also evaluate our method against state-of-the-art navigation approaches and professional human drone pilots.
* Accepted for publication in the Conference on Robotic Learning (CoRL) 2018, Zurich. 10 pages (+3 supplementary)