 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Obstacle Avoidance Based on Inverse PPO for Fixed-wing UAVs
Nov 27, 2024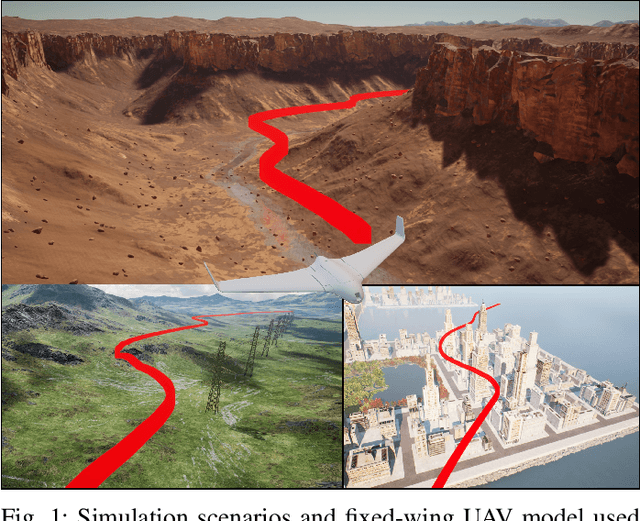
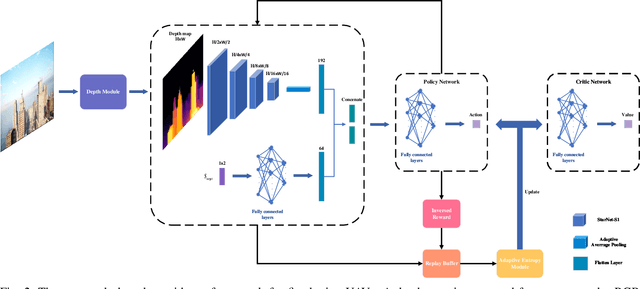
Fixed-wing Unmanned Aerial Vehicles (UAVs) are one of the most commonly used platforms for the burgeoning Low-altitude Economy (LAE) and Urban Air Mobility (UAM), due to their long endurance and high-speed capabilities. Classical obstacle avoidance systems, which rely on prior maps or sophisticated sensors, face limitations in unknown low-altitude environments and small UAV platforms. In response, this paper proposes a lightweight deep reinforcement learning (DRL) based UAV collision avoidance system that enables a fixed-wing UAV to avoid unknown obstacles at cruise speed over 30m/s, with only onboard visual sensors. The proposed system employs a single-frame image depth inference module with a streamlined network architecture to ensure real-time obstacle detection, optimized for edge computing devices. After that, a reinforcement learning controller with a novel reward function is designed to balance the target approach and flight trajectory smoothness, satisfying the specific dynamic constraints and stability requirements of a fixed-wing UAV platform. An adaptive entropy adjustment mechanism is introduced to mitigate the exploration-exploitation trade-off inherent in DRL, improving training convergence and obstacle avoidance success rates. Extensive software-in-the-loop and hardware-in-the-loop experiments demonstrate that the proposed framework outperforms other methods in obstacle avoidance efficiency and flight trajectory smoothness and confirm the feasibility of implementing the algorithm on edge devices. The source code is publicly available at \url{https://github.com/ch9397/FixedWing-MonoPPO}.
Physical Adversarial Attack on Monocular Depth Estimation via Shape-Varying Patches
Jul 24, 2024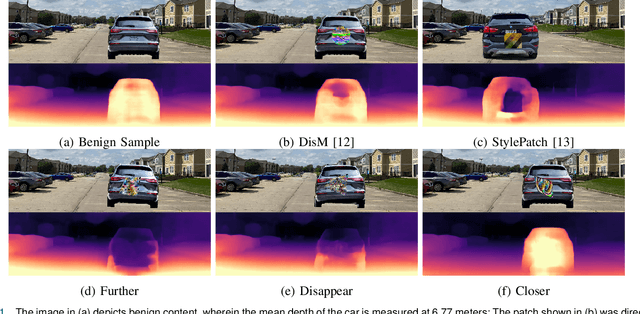
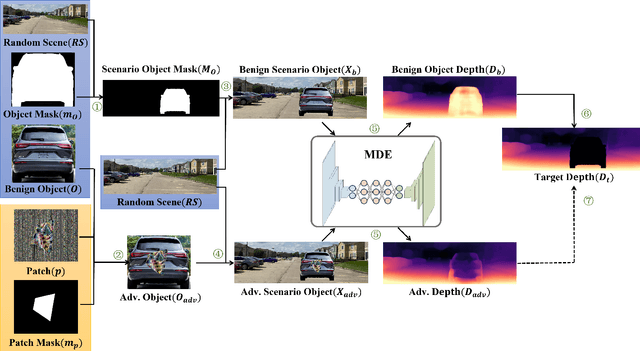
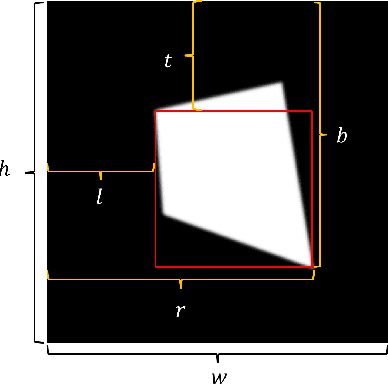
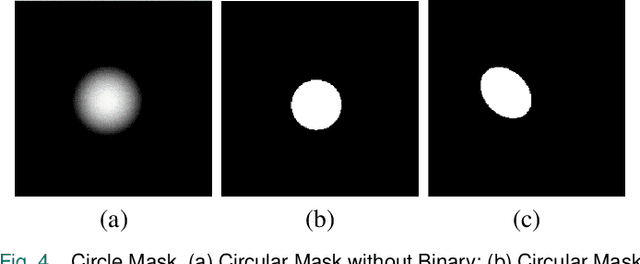
Adversarial attacks against monocular depth estimation (MDE) systems pose significant challenges, particularly in safety-critical applications such as autonomous driving. Existing patch-based adversarial attacks for MDE are confined to the vicinity of the patch, making it difficult to affect the entire target. To address this limitation, we propose a physics-based adversarial attack on monocular depth estimation, employing a framework called Attack with Shape-Varying Patches (ASP), aiming to optimize patch content, shape, and position to maximize effectiveness. We introduce various mask shapes, including quadrilateral, rectangular, and circular masks, to enhance the flexibility and efficiency of the attack. Furthermore, we propose a new loss function to extend the influence of the patch beyond the overlapping regions. Experimental results demonstrate that our attack method generates an average depth error of 18 meters on the target car with a patch area of 1/9, affecting over 98\% of the target area.
Flexible Physical Camouflage Generation Based on a Differential Approach
Feb 21, 2024This study introduces a novel approach to neural rendering, specifically tailored for adversarial camouflage, within an extensive 3D rendering framework. Our method, named FPA, goes beyond traditional techniques by faithfully simulating lighting conditions and material variations, ensuring a nuanced and realistic representation of textures on a 3D target. To achieve this, we employ a generative approach that learns adversarial patterns from a diffusion model. This involves incorporating a specially designed adversarial loss and covert constraint loss to guarantee the adversarial and covert nature of the camouflage in the physical world. Furthermore, we showcase the effectiveness of the proposed camouflage in sticker mode, demonstrating its ability to cover the target without compromising adversarial information. Through empirical and physical experiments, FPA exhibits strong performance in terms of attack success rate and transferability. Additionally, the designed sticker-mode camouflage, coupled with a concealment constraint, adapts to the environment, yielding diverse styles of texture. Our findings highlight the versatility and efficacy of the FPA approach in adversarial camouflage applications.
An Index Policy Based on Sarsa and Q-learning for Heterogeneous Smart Target Tracking
Feb 19, 2024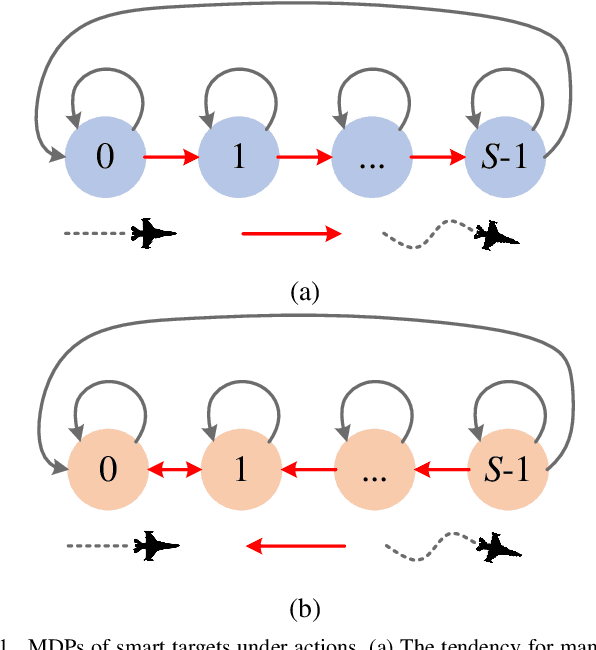
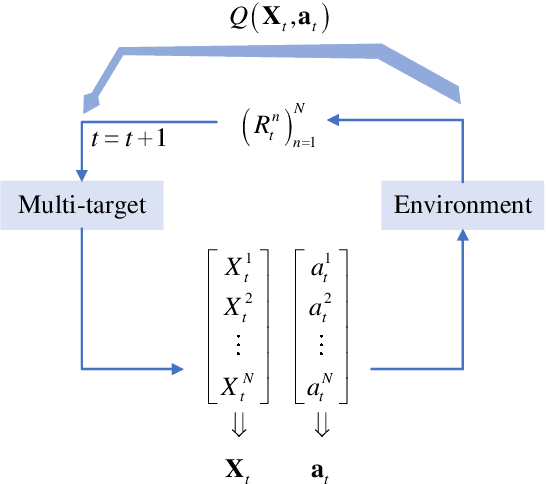
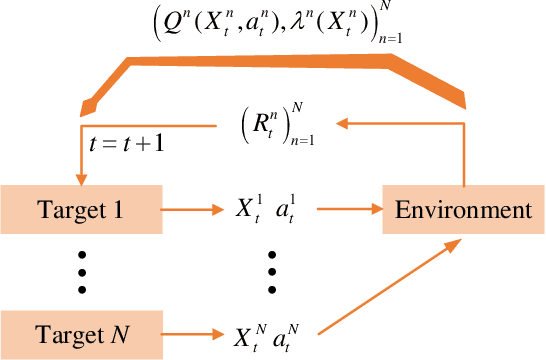
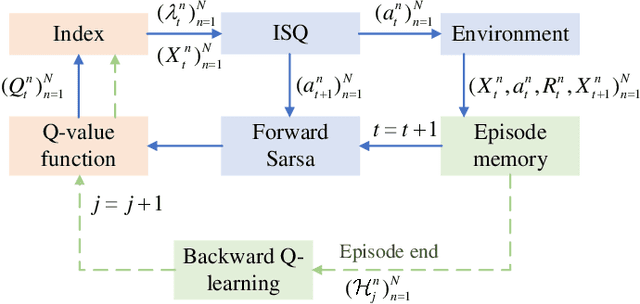
In solving the non-myopic radar scheduling for multiple smart target tracking within an active and passive radar network, we need to consider both short-term enhanced tracking performance and a higher probability of target maneuvering in the future with active tracking. Acquiring the long-term tracking performance while scheduling the beam resources of active and passive radars poses a challenge. To address this challenge, we model this problem as a Markov decision process consisting of parallel restless bandit processes. Each bandit process is associated with a smart target, of which the estimation state evolves according to different discrete dynamic models for different actions - whether or not the target is being tracked. The discrete state is defined by the dynamic mode. The problem exhibits the curse of dimensionality, where optimal solutions are in general intractable. We resort to heuristics through the famous restless multi-armed bandit techniques. It follows with efficient scheduling policies based on the indices that are real numbers representing the marginal rewards of taking different actions. For the inevitable practical case with unknown transition matrices, we propose a new method that utilizes the forward Sarsa and backward Q-learning to approximate the indices through adapting the state-action value functions, or equivalently the Q-functions, and propose a new policy, namely ISQ, aiming to maximize the long-term tracking rewards. Numerical results demonstrate that the proposed ISQ policy outperforms conventional Q-learning-based methods and rapidly converges to the well-known Whittle index policy with revealed state transition models, which is considered the benchmark.
Multisource Semisupervised Adversarial Domain Generalization Network for Cross-Scene Sea\textendash Land Clutter Classification
Feb 09, 2024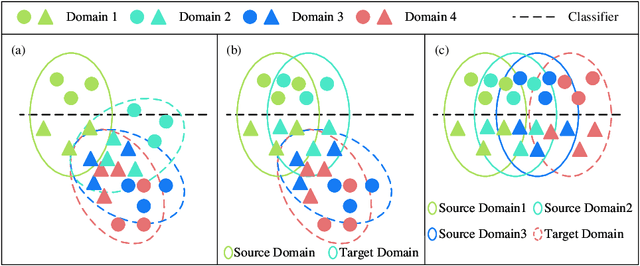
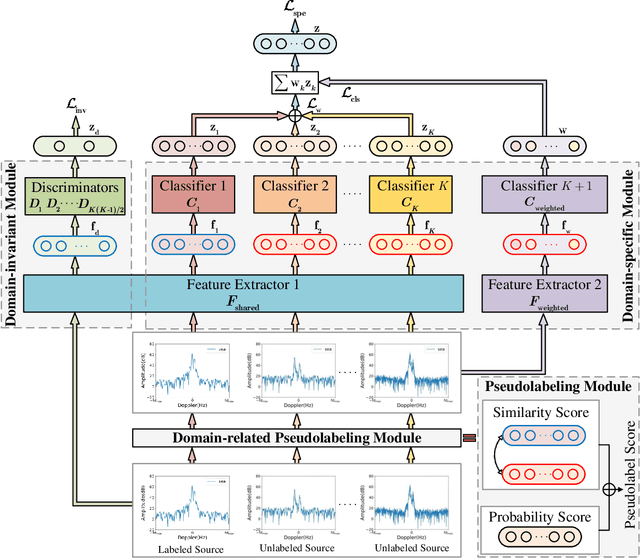
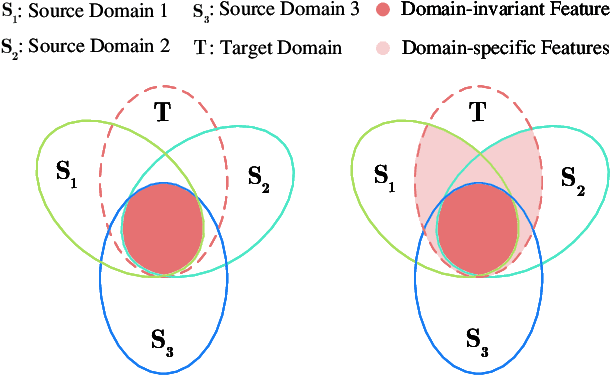
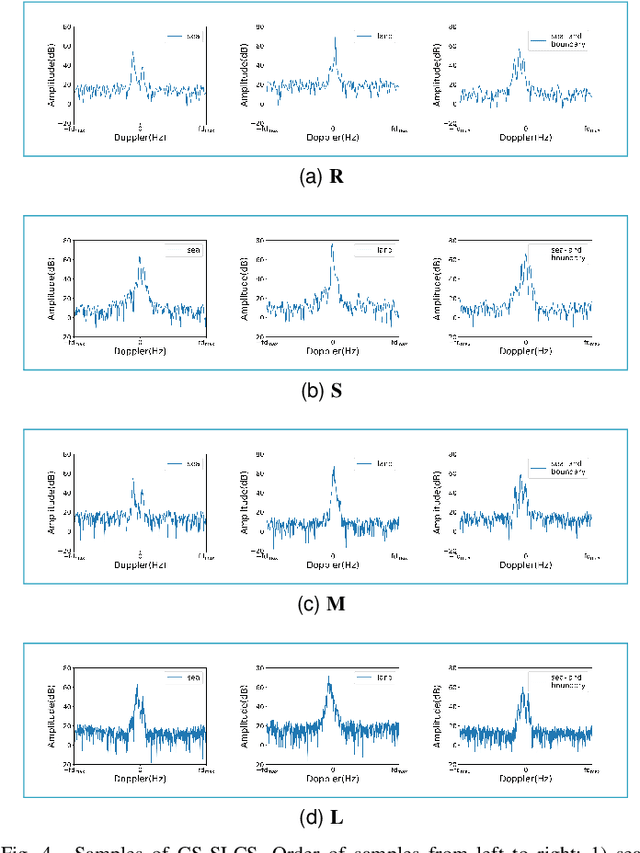
Deep learning (DL)-based sea\textendash land clutter classification for sky-wave over-the-horizon-radar (OTHR) has become a novel research topic. In engineering applications, real-time predictions of sea\textendash land clutter with existing distribution discrepancies are crucial. To solve this problem, this article proposes a novel Multisource Semisupervised Adversarial Domain Generalization Network (MSADGN) for cross-scene sea\textendash land clutter classification. MSADGN can extract domain-invariant and domain-specific features from one labeled source domain and multiple unlabeled source domains, and then generalize these features to an arbitrary unseen target domain for real-time prediction of sea\textendash land clutter. Specifically, MSADGN consists of three modules: domain-related pseudolabeling module, domain-invariant module, and domain-specific module. The first module introduces an improved pseudolabel method called domain-related pseudolabel, which is designed to generate reliable pseudolabels to fully exploit unlabeled source domains. The second module utilizes a generative adversarial network (GAN) with a multidiscriminator to extract domain-invariant features, to enhance the model's transferability in the target domain. The third module employs a parallel multiclassifier branch to extract domain-specific features, to enhance the model's discriminability in the target domain. The effectiveness of our method is validated in twelve domain generalizations (DG) scenarios. Meanwhile, we selected 10 state-of-the-art DG methods for comparison. The experimental results demonstrate the superiority of our method.
Arithmetic Average Density Fusion -- Part IV: Distributed Heterogeneous Fusion of RFS and LRFS Filters via Variational Approximation
Jan 31, 2024This paper, the fourth part of a series of papers on the arithmetic average (AA) density fusion approach and its application for target tracking, addresses the intricate challenge of distributed heterogeneous multisensor multitarget tracking, where each inter-connected sensor operates a probability hypothesis density (PHD) filter, a multiple Bernoulli (MB) filter or a labeled MB (LMB) filter and they cooperate with each other via information fusion. Earlier papers in this series have proven that the proper AA fusion of these filters is all exactly built on averaging their respective unlabeled/labeled PHDs. Based on this finding, two PHD-AA fusion approaches are proposed via variational minimization of the upper bound of the Kullback-Leibler divergence between the local and multi-filter averaged PHDs subject to cardinality consensus based on the Gaussian mixture implementation, enabling heterogeneous filter cooperation. One focuses solely on fitting the weights of the local Gaussian components (L-GCs), while the other simultaneously fits all the parameters of the L-GCs at each sensor, both seeking average consensus on the unlabeled PHD, irrespective of the specific posterior form of the local filters. For the distributed peer-to-peer communication, both the classic consensus and flooding paradigms have been investigated. Simulations have demonstrated the effectiveness and flexibility of the proposed approaches in both homogeneous and heterogeneous scenarios.
DOEPatch: Dynamically Optimized Ensemble Model for Adversarial Patches Generation
Dec 28, 2023Object detection is a fundamental task in various applications ranging from autonomous driving to intelligent security systems. However, recognition of a person can be hindered when their clothing is decorated with carefully designed graffiti patterns, leading to the failure of object detection. To achieve greater attack potential against unknown black-box models, adversarial patches capable of affecting the outputs of multiple-object detection models are required. While ensemble models have proven effective, current research in the field of object detection typically focuses on the simple fusion of the outputs of all models, with limited attention being given to developing general adversarial patches that can function effectively in the physical world. In this paper, we introduce the concept of energy and treat the adversarial patches generation process as an optimization of the adversarial patches to minimize the total energy of the ``person'' category. Additionally, by adopting adversarial training, we construct a dynamically optimized ensemble model. During training, the weight parameters of the attacked target models are adjusted to find the balance point at which the generated adversarial patches can effectively attack all target models. We carried out six sets of comparative experiments and tested our algorithm on five mainstream object detection models. The adversarial patches generated by our algorithm can reduce the recognition accuracy of YOLOv2 and YOLOv3 to 13.19\% and 29.20\%, respectively. In addition, we conducted experiments to test the effectiveness of T-shirts covered with our adversarial patches in the physical world and could achieve that people are not recognized by the object detection model. Finally, leveraging the Grad-CAM tool, we explored the attack mechanism of adversarial patches from an energetic perspective.
PGN: A perturbation generation network against deep reinforcement learning
Dec 20, 2023Deep reinforcement learning has advanced greatly and applied in many areas. In this paper, we explore the vulnerability of deep reinforcement learning by proposing a novel generative model for creating effective adversarial examples to attack the agent. Our proposed model can achieve both targeted attacks and untargeted attacks. Considering the specificity of deep reinforcement learning, we propose the action consistency ratio as a measure of stealthiness, and a new measurement index of effectiveness and stealthiness. Experiment results show that our method can ensure the effectiveness and stealthiness of attack compared with other algorithms. Moreover, our methods are considerably faster and thus can achieve rapid and efficient verification of the vulnerability of deep reinforcement learning.
Classification-Aided Robust Multiple Target Tracking Using Neural Enhanced Message Passing
Oct 19, 2023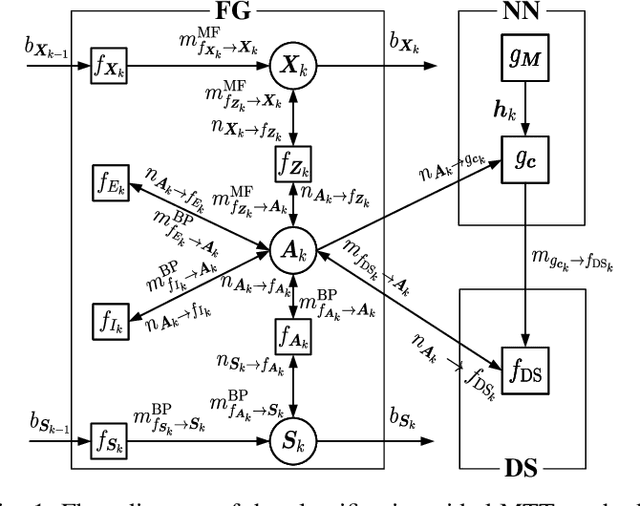
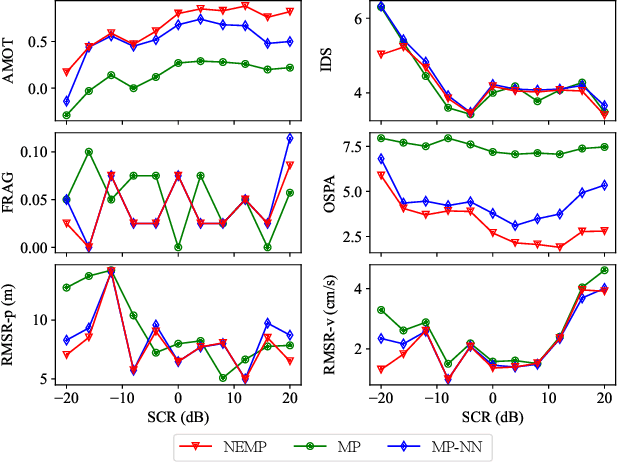
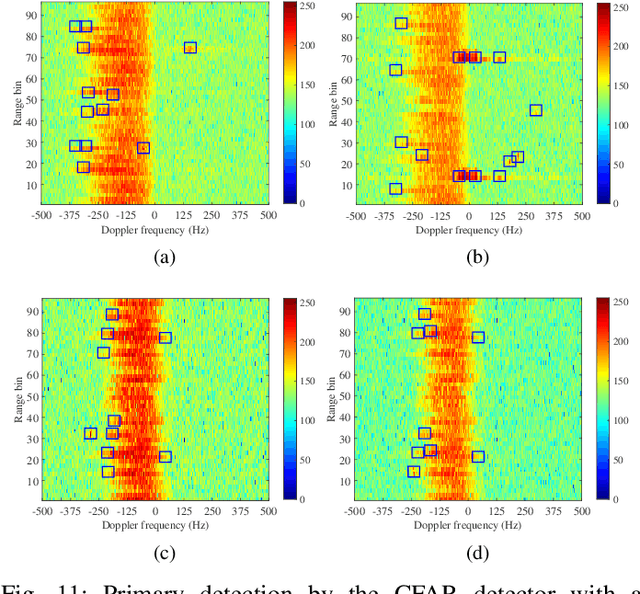
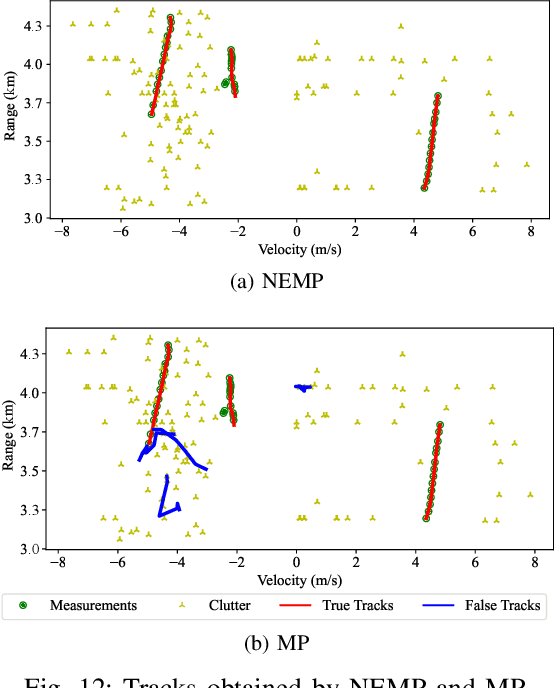
We address the challenge of tracking an unknown number of targets in strong clutter environments using measurements from a radar sensor. Leveraging the range-Doppler spectra information, we identify the measurement classes, which serve as additional information to enhance clutter rejection and data association, thus bolstering the robustness of target tracking. We first introduce a novel neural enhanced message passing approach, where the beliefs obtained by the unified message passing are fed into the neural network as additional information. The output beliefs are then utilized to refine the original beliefs. Then, we propose a classification-aided robust multiple target tracking algorithm, employing the neural enhanced message passing technique. This algorithm is comprised of three modules: a message-passing module, a neural network module, and a Dempster-Shafer module. The message-passing module is used to represent the statistical model by the factor graph and infers target kinematic states, visibility states, and data associations based on the spatial measurement information. The neural network module is employed to extract features from range-Doppler spectra and derive beliefs on whether a measurement is target-generated or clutter-generated. The Dempster-Shafer module is used to fuse the beliefs obtained from both the factor graph and the neural network. As a result, our proposed algorithm adopts a model-and-data-driven framework, effectively enhancing clutter suppression and data association, leading to significant improvements in multiple target tracking performance. We validate the effectiveness of our approach using both simulated and real data scenarios, demonstrating its capability to handle challenging tracking scenarios in practical radar applications.
Light-LOAM: A Lightweight LiDAR Odometry and Mapping based on Graph-Matching
Oct 06, 2023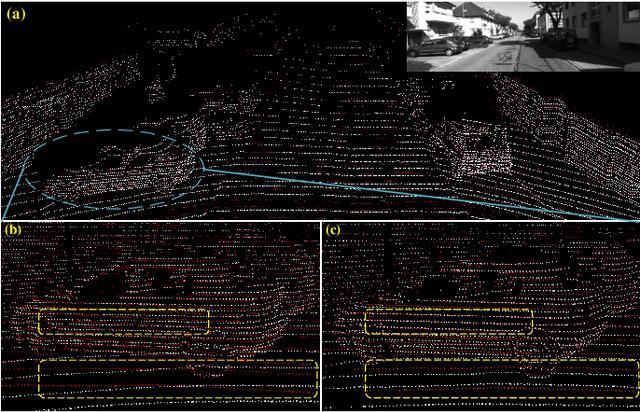
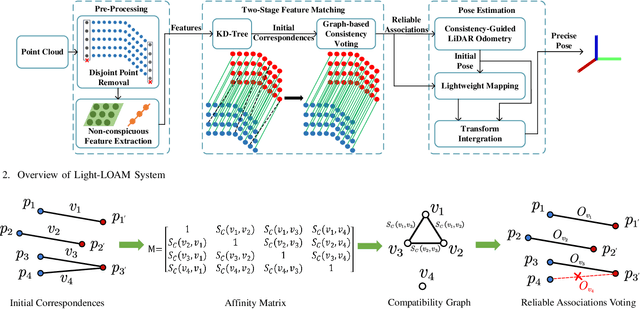
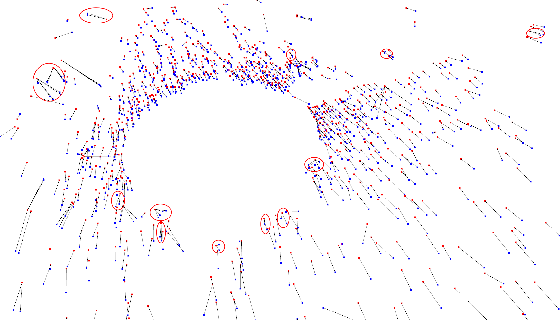
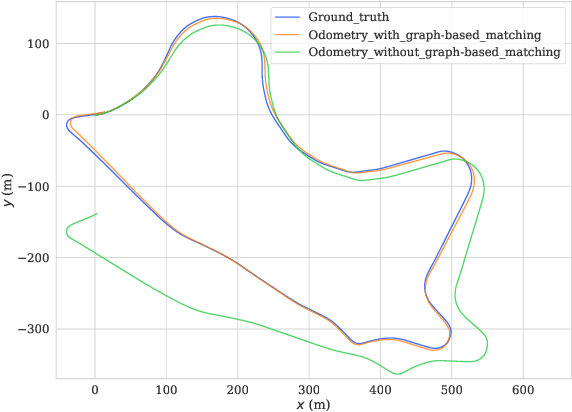
Simultaneous Localization and Mapping (SLAM) plays an important role in robot autonomy. Reliability and efficiency are the two most valued features for applying SLAM in robot applications. In this paper, we consider achieving a reliable LiDAR-based SLAM function in computation-limited platforms, such as quadrotor UAVs based on graph-based point cloud association. First, contrary to most works selecting salient features for point cloud registration, we propose a non-conspicuous feature selection strategy for reliability and robustness purposes. Then a two-stage correspondence selection method is used to register the point cloud, which includes a KD-tree-based coarse matching followed by a graph-based matching method that uses geometric consistency to vote out incorrect correspondences. Additionally, we propose an odometry approach where the weight optimizations are guided by vote results from the aforementioned geometric consistency graph. In this way, the optimization of LiDAR odometry rapidly converges and evaluates a fairly accurate transformation resulting in the back-end module efficiently finishing the mapping task. Finally, we evaluate our proposed framework on the KITTI odometry dataset and real-world environments. Experiments show that our SLAM system achieves a comparative level or higher level of accuracy with more balanced computation efficiency compared with the mainstream LiDAR-based SLAM solutions.