 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Accuracy: A Cognitive Load Framework for Mapping the Capability Boundaries of Tool-use Agents
Jan 28, 2026The ability of Large Language Models (LLMs) to use external tools unlocks powerful real-world interactions, making rigorous evaluation essential. However, current benchmarks primarily report final accuracy, revealing what models can do but obscuring the cognitive bottlenecks that define their true capability boundaries. To move from simple performance scoring to a diagnostic tool, we introduce a framework grounded in Cognitive Load Theory. Our framework deconstructs task complexity into two quantifiable components: Intrinsic Load, the inherent structural complexity of the solution path, formalized with a novel Tool Interaction Graph; and Extraneous Load, the difficulty arising from ambiguous task presentation. To enable controlled experiments, we construct ToolLoad-Bench, the first benchmark with parametrically adjustable cognitive load. Our evaluation reveals distinct performance cliffs as cognitive load increases, allowing us to precisely map each model's capability boundary. We validate that our framework's predictions are highly calibrated with empirical results, establishing a principled methodology for understanding an agent's limits and a practical foundation for building more efficient systems.
PEARL: Plan Exploration and Adaptive Reinforcement Learning for Multihop Tool Use
Jan 28, 2026Large Language Models show great potential with external tools, but face significant challenges in complex, multi-turn tool invocation. They often exhibit weak planning, tool hallucination, erroneous parameter generation, and struggle with robust interaction. To tackle these issues, we present PEARL, a novel framework to enhance LLM planning and execution for sophisticated tool use. PEARL adopts a two-stage approach: an offline phase where the agent explores tools to learn valid usage patterns and failure conditions, and an online reinforcement learning phase. In the online phase, a dedicated Planner is trained via group Relative Policy Optimization (GRPO) with a carefully designed reward function that provides distinct signals for planning quality. Experiments on the ToolHop and T-Eval benchmarks show PEARL significantly outperforms existing methods, achieving a new state-of-the-art success rate of \textbf{56.5\%} on ToolHop while maintaining a low invocation error rate. Our work marks a key advance in addressing the complex planning challenges of tool use, contributing to the development of more robust and reliable LLM-based agents.
PEARL: Prototype-Enhanced Alignment for Label-Efficient Representation Learning with Deployment-Driven Insights from Digital Governance Communication Systems
Jan 24, 2026In many deployed systems, new text inputs are handled by retrieving similar past cases, for example when routing and responding to citizen messages in digital governance platforms. When these systems fail, the problem is often not the language model itself, but that the nearest neighbors in the embedding space correspond to the wrong cases. Modern machine learning systems increasingly rely on fixed, high-dimensional embeddings produced by large pretrained models and sentence encoders. In real-world deployments, labels are scarce, domains shift over time, and retraining the base encoder is expensive or infeasible. As a result, downstream performance depends heavily on embedding geometry. Yet raw embeddings are often poorly aligned with the local neighborhood structure required by nearest-neighbor retrieval, similarity search, and lightweight classifiers that operate directly on embeddings. We propose PEARL (Prototype-Enhanced Aligned Representation Learning), a label-efficient approach that uses limited supervision to softly align embeddings toward class prototypes. The method reshapes local neighborhood geometry while preserving dimensionality and avoiding aggressive projection or collapse. Its aim is to bridge the gap between purely unsupervised post-processing, which offers limited and inconsistent gains, and fully supervised projections that require substantial labeled data. We evaluate PEARL under controlled label regimes ranging from extreme label scarcity to higher-label settings. In the label-scarce condition, PEARL substantially improves local neighborhood quality, yielding 25.7% gains over raw embeddings and more than 21.1% gains relative to strong unsupervised post-processing, precisely in the regime where similarity-based systems are most brittle.
MemGovern: Enhancing Code Agents through Learning from Governed Human Experiences
Jan 13, 2026While autonomous software engineering (SWE) agents are reshaping programming paradigms, they currently suffer from a "closed-world" limitation: they attempt to fix bugs from scratch or solely using local context, ignoring the immense historical human experience available on platforms like GitHub. Accessing this open-world experience is hindered by the unstructured and fragmented nature of real-world issue-tracking data. In this paper, we introduce MemGovern, a framework designed to govern and transform raw GitHub data into actionable experiential memory for agents. MemGovern employs experience governance to convert human experience into agent-friendly experience cards and introduces an agentic experience search strategy that enables logic-driven retrieval of human expertise. By producing 135K governed experience cards, MemGovern achieves a significant performance boost, improving resolution rates on the SWE-bench Verified by 4.65%. As a plug-in approach, MemGovern provides a solution for agent-friendly memory infrastructure.
Safe Path Planning and Observation Quality Enhancement Strategy for Unmanned Aerial Vehicles in Water Quality Monitoring Tasks
Dec 24, 2025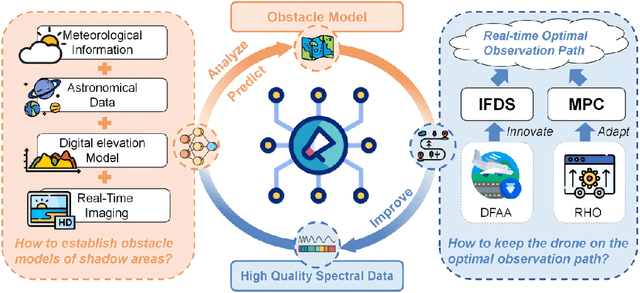
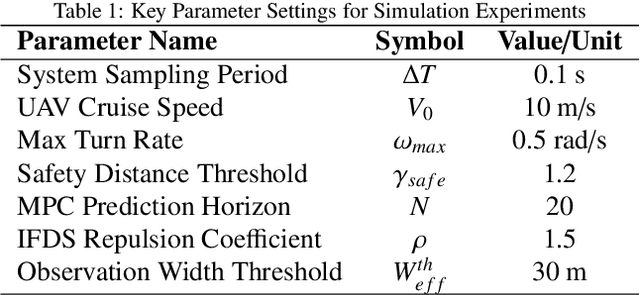


Unmanned Aerial Vehicle (UAV) spectral remote sensing technology is widely used in water quality monitoring. However, in dynamic environments, varying illumination conditions, such as shadows and specular reflection (sun glint), can cause severe spectral distortion, thereby reducing data availability. To maximize the acquisition of high-quality data while ensuring flight safety, this paper proposes an active path planning method for dynamic light and shadow disturbance avoidance. First, a dynamic prediction model is constructed to transform the time-varying light and shadow disturbance areas into three-dimensional virtual obstacles. Second, an improved Interfered Fluid Dynamical System (IFDS) algorithm is introduced, which generates a smooth initial obstacle avoidance path by building a repulsive force field. Subsequently, a Model Predictive Control (MPC) framework is employed for rolling-horizon path optimization to handle flight dynamics constraints and achieve real-time trajectory tracking. Furthermore, a Dynamic Flight Altitude Adjustment (DFAA) mechanism is designed to actively reduce the flight altitude when the observable area is narrow, thereby enhancing spatial resolution. Simulation results show that, compared with traditional PID and single obstacle avoidance algorithms, the proposed method achieves an obstacle avoidance success rate of 98% in densely disturbed scenarios, significantly improves path smoothness, and increases the volume of effective observation data by approximately 27%. This research provides an effective engineering solution for precise UAV water quality monitoring in complex illumination environments.
On Recommending Category: A Cascading Approach
Dec 17, 2025Recommendation plays a key role in e-commerce, enhancing user experience and boosting commercial success. Existing works mainly focus on recommending a set of items, but online e-commerce platforms have recently begun to pay attention to exploring users' potential interests at the category level. Category-level recommendation allows e-commerce platforms to promote users' engagements by expanding their interests to different types of items. In addition, it complements item-level recommendations when the latter becomes extremely challenging for users with little-known information and past interactions. Furthermore, it facilitates item-level recommendations in existing works. The predicted category, which is called intention in those works, aids the exploration of item-level preference. However, such category-level preference prediction has mostly been accomplished through applying item-level models. Some key differences between item-level recommendations and category-level recommendations are ignored in such a simplistic adaptation. In this paper, we propose a cascading category recommender (CCRec) model with a variational autoencoder (VAE) to encode item-level information to perform category-level recommendations. Experiments show the advantages of this model over methods designed for item-level recommendations.
ProAPO: Progressively Automatic Prompt Optimization for Visual Classification
Feb 27, 2025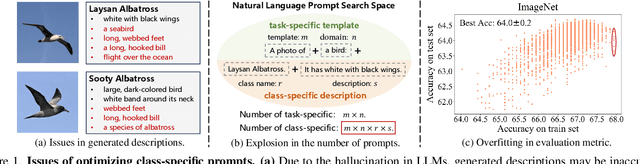
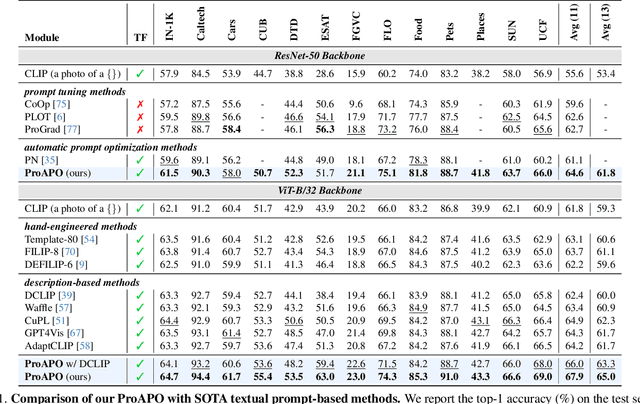
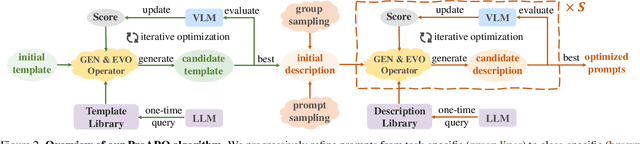
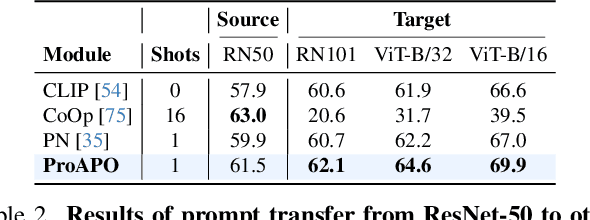
Vision-language models (VLMs) have made significant progress in image classification by training with large-scale paired image-text data. Their performances largely depend on the prompt quality. While recent methods show that visual descriptions generated by large language models (LLMs) enhance the generalization of VLMs, class-specific prompts may be inaccurate or lack discrimination due to the hallucination in LLMs. In this paper, we aim to find visually discriminative prompts for fine-grained categories with minimal supervision and no human-in-the-loop. An evolution-based algorithm is proposed to progressively optimize language prompts from task-specific templates to class-specific descriptions. Unlike optimizing templates, the search space shows an explosion in class-specific candidate prompts. This increases prompt generation costs, iterative times, and the overfitting problem. To this end, we first introduce several simple yet effective edit-based and evolution-based operations to generate diverse candidate prompts by one-time query of LLMs. Then, two sampling strategies are proposed to find a better initial search point and reduce traversed categories, saving iteration costs. Moreover, we apply a novel fitness score with entropy constraints to mitigate overfitting. In a challenging one-shot image classification setting, our method outperforms existing textual prompt-based methods and improves LLM-generated description methods across 13 datasets. Meanwhile, we demonstrate that our optimal prompts improve adapter-based methods and transfer effectively across different backbones.
Scaling Particle Collision Data Analysis
Nov 28, 2024For decades, researchers have developed task-specific models to address scientific challenges across diverse disciplines. Recently, large language models (LLMs) have shown enormous capabilities in handling general tasks; however, these models encounter difficulties in addressing real-world scientific problems, particularly in domains involving large-scale numerical data analysis, such as experimental high energy physics. This limitation is primarily due to BPE tokenization's inefficacy with numerical data. In this paper, we propose a task-agnostic architecture, BBT-Neutron, which employs a binary tokenization method to facilitate pretraining on a mixture of textual and large-scale numerical experimental data. The project code is available at https://github.com/supersymmetry-technologies/bbt-neutron. We demonstrate the application of BBT-Neutron to Jet Origin Identification (JoI), a critical categorization challenge in high-energy physics that distinguishes jets originating from various quarks or gluons. Our results indicate that BBT-Neutron achieves comparable performance to state-of-the-art task-specific JoI models. Furthermore, we examine the scaling behavior of BBT-Neutron's performance with increasing data volume, suggesting the potential for BBT-Neutron to serve as a foundational model for particle physics data analysis, with possible extensions to a broad spectrum of scientific computing applications for Big Science experiments, industrial manufacturing and spacial computing.
MoD-SLAM: Monocular Dense Mapping for Unbounded 3D Scene Reconstruction
Feb 09, 2024



Neural implicit representations have recently been demonstrated in many fields including Simultaneous Localization And Mapping (SLAM). Current neural SLAM can achieve ideal results in reconstructing bounded scenes, but this relies on the input of RGB-D images. Neural-based SLAM based only on RGB images is unable to reconstruct the scale of the scene accurately, and it also suffers from scale drift due to errors accumulated during tracking. To overcome these limitations, we present MoD-SLAM, a monocular dense mapping method that allows global pose optimization and 3D reconstruction in real-time in unbounded scenes. Optimizing scene reconstruction by monocular depth estimation and using loop closure detection to update camera pose enable detailed and precise reconstruction on large scenes. Compared to previous work, our approach is more robust, scalable and versatile. Our experiments demonstrate that MoD-SLAM has more excellent mapping performance than prior neural SLAM methods, especially in large borderless scenes.