 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoing Down the Abstraction Stream with Augmented Reality and Tangible Robots: the Case of Vector Instruction
Apr 20, 2025Despite being used in many engineering and scientific areas such as physics and mathematics and often taught in high school, graphical vector addition turns out to be a topic prone to misconceptions in understanding even at university-level physics classes. To improve the learning experience and the resulting understanding of vectors, we propose to investigate how concreteness fading implemented with the use of augmented reality and tangible robots could help learners to build a strong representation of vector addition. We design a gamified learning environment consisting of three concreteness fading stages and conduct an experiment with 30 participants. Our results shows a positive learning gain. We analyze extensively the behavior of the participants to understand the usage of the technological tools -- augmented reality and tangible robots -- during the learning scenario. Finally, we discuss how the combination of these tools shows real advantages in implementing the concreteness fading paradigm. Our work provides empirical insights into how users utilize concrete visualizations conveyed by a haptic-enabled robot and augmented reality in a learning scenario.
Using Large Multimodal Models to Extract Knowledge Components for Knowledge Tracing from Multimedia Question Information
Sep 30, 2024



Knowledge tracing models have enabled a range of intelligent tutoring systems to provide feedback to students. However, existing methods for knowledge tracing in learning sciences are predominantly reliant on statistical data and instructor-defined knowledge components, making it challenging to integrate AI-generated educational content with traditional established methods. We propose a method for automatically extracting knowledge components from educational content using instruction-tuned large multimodal models. We validate this approach by comprehensively evaluating it against knowledge tracing benchmarks in five domains. Our results indicate that the automatically extracted knowledge components can effectively replace human-tagged labels, offering a promising direction for enhancing intelligent tutoring systems in limited-data scenarios, achieving more explainable assessments in educational settings, and laying the groundwork for automated assessment.
Co-designing a Child-Robot Relational Norm Intervention to Regulate Children's Handwriting Posture
Jun 11, 2024


Persuasive social robots employ their social influence to modulate children's behaviours in child-robot interaction. In this work, we introduce the Child-Robot Relational Norm Intervention (CRNI) model, leveraging the passive role of social robots and children's reluctance to inconvenience others to influence children's behaviours. Unlike traditional persuasive strategies that employ robots in active roles, CRNI utilizes an indirect approach by generating a disturbance for the robot in response to improper child behaviours, thereby motivating behaviour change through the avoidance of norm violations. The feasibility of CRNI is explored with a focus on improving children's handwriting posture. To this end, as a preliminary work, we conducted two participatory design workshops with 12 children and 1 teacher to identify effective disturbances that can promote posture correction.
The Dynamics of Handwriting Improves the Automated Diagnosis of Dysgraphia
Jun 12, 2019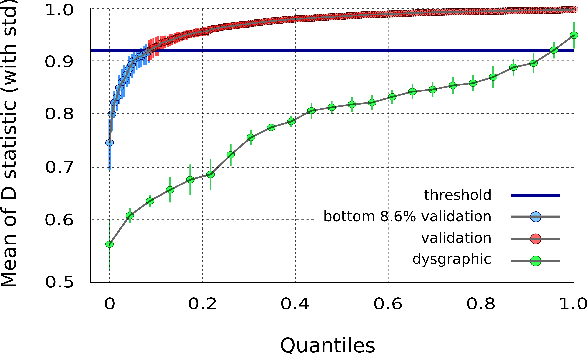
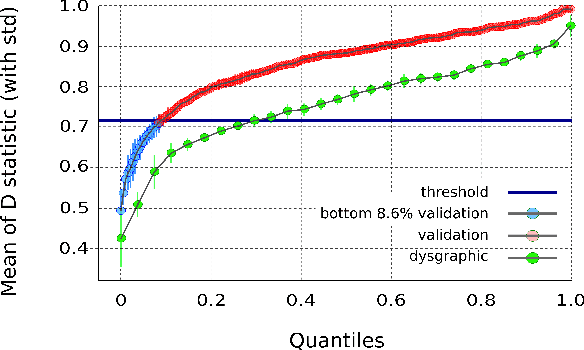
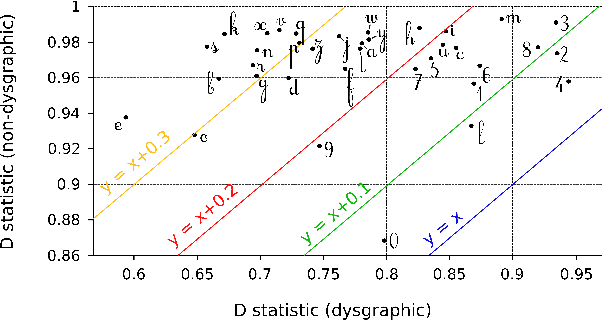
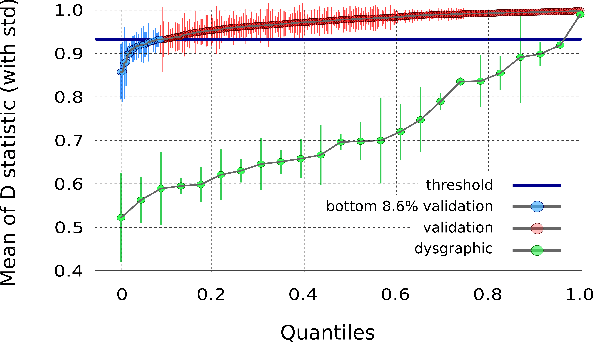
Handwriting disorder (termed dysgraphia) is a far from a singular problem as nearly 8.6% of the population in France is considered dysgraphic. Moreover, research highlights the fundamental importance to detect and remediate these handwriting difficulties as soon as possible as they may affect a child's entire life, undermining performance and self-confidence in a wide variety of school activities. At the moment, the detection of handwriting difficulties is performed through a standard test called BHK. This detection, performed by therapists, is laborious because of its high cost and subjectivity. We present a digital approach to identify and characterize handwriting difficulties via a Recurrent Neural Network model (RNN). The child under investigation is asked to write on a graphics tablet all the letters of the alphabet as well as the ten digits. Once complete, the RNN delivers a diagnosis in a few milliseconds and demonstrates remarkable efficiency as it correctly identifies more than 90% of children diagnosed as dysgraphic using the BHK test. The main advantage of our tablet-based system is that it captures the dynamic features of writing -- something a human expert, such as a teacher, is unable to do. We show that incorporating the dynamic information available by the use of tablet is highly beneficial to our digital test to discriminate between typically-developing and dysgraphic children.
Iterative Classroom Teaching
Nov 12, 2018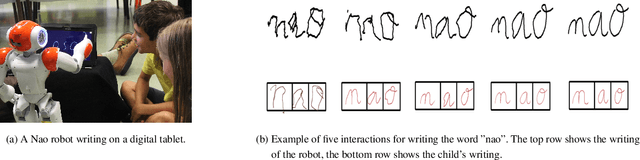
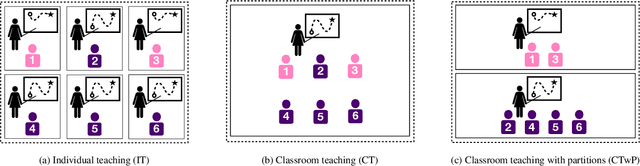
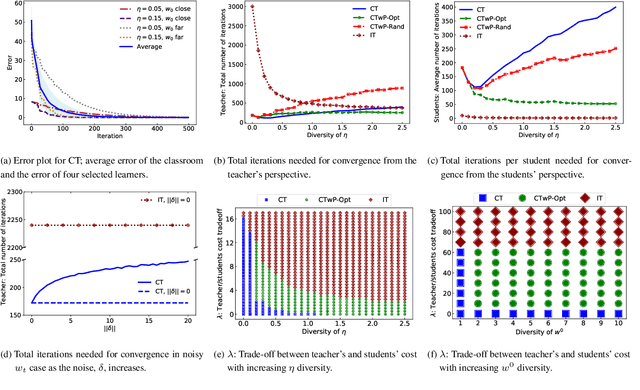
We consider the machine teaching problem in a classroom-like setting wherein the teacher has to deliver the same examples to a diverse group of students. Their diversity stems from differences in their initial internal states as well as their learning rates. We prove that a teacher with full knowledge about the learning dynamics of the students can teach a target concept to the entire classroom using O(min{d,N} log(1/eps)) examples, where d is the ambient dimension of the problem, N is the number of learners, and eps is the accuracy parameter. We show the robustness of our teaching strategy when the teacher has limited knowledge of the learners' internal dynamics as provided by a noisy oracle. Further, we study the trade-off between the learners' workload and the teacher's cost in teaching the target concept. Our experiments validate our theoretical results and suggest that appropriately partitioning the classroom into homogenous groups provides a balance between these two objectives.
Cognitive Architecture for Mutual Modelling
Feb 22, 2016
In social robotics, robots needs to be able to be understood by humans. Especially in collaborative tasks where they have to share mutual knowledge. For instance, in an educative scenario, learners share their knowledge and they must adapt their behaviour in order to make sure they are understood by others. Learners display behaviours in order to show their understanding and teachers adapt in order to make sure that the learners' knowledge is the required one. This ability requires a model of their own mental states perceived by others: \textit{"has the human understood that I(robot) need this object for the task or should I explain it once again ?"} In this paper, we discuss the importance of a cognitive architecture enabling second-order Mutual Modelling for Human-Robot Interaction in educative contexts.
Capturing "attrition intensifying" structural traits from didactic interaction sequences of MOOC learners
Sep 20, 2014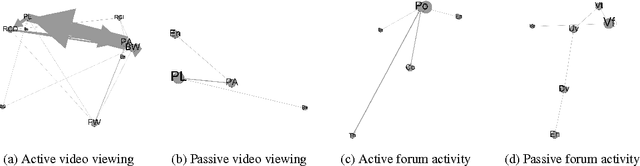

This work is an attempt to discover hidden structural configurations in learning activity sequences of students in Massive Open Online Courses (MOOCs). Leveraging combined representations of video clickstream interactions and forum activities, we seek to fundamentally understand traits that are predictive of decreasing engagement over time. Grounded in the interdisciplinary field of network science, we follow a graph based approach to successfully extract indicators of active and passive MOOC participation that reflect persistence and regularity in the overall interaction footprint. Using these rich educational semantics, we focus on the problem of predicting student attrition, one of the major highlights of MOOC literature in the recent years. Our results indicate an improvement over a baseline ngram based approach in capturing "attrition intensifying" features from the learning activities that MOOC learners engage in. Implications for some compelling future research are discussed.
Your click decides your fate: Inferring Information Processing and Attrition Behavior from MOOC Video Clickstream Interactions
Sep 16, 2014

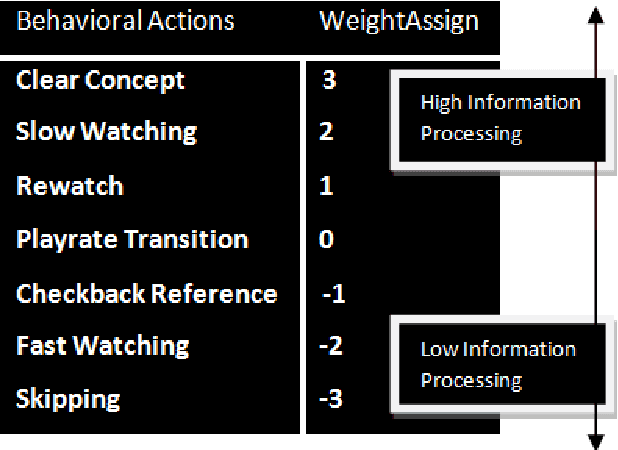

In this work, we explore video lecture interaction in Massive Open Online Courses (MOOCs), which is central to student learning experience on these educational platforms. As a research contribution, we operationalize video lecture clickstreams of students into cognitively plausible higher level behaviors, and construct a quantitative information processing index, which can aid instructors to better understand MOOC hurdles and reason about unsatisfactory learning outcomes. Our results illustrate how such a metric inspired by cognitive psychology can help answer critical questions regarding students' engagement, their future click interactions and participation trajectories that lead to in-video & course dropouts. Implications for research and practice are discussed