 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStable Linear Subspace Identification: A Machine Learning Approach
Nov 20, 2023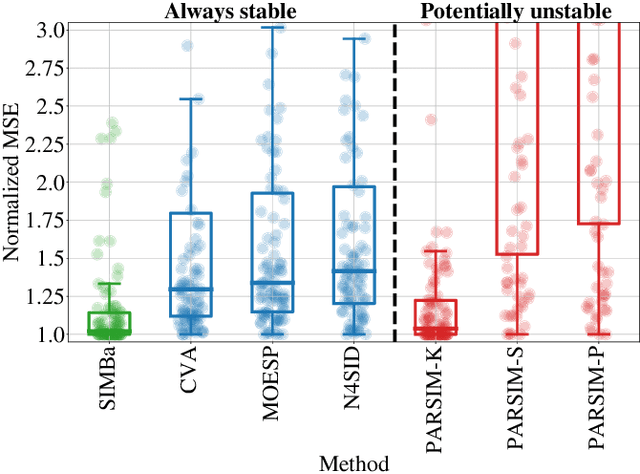
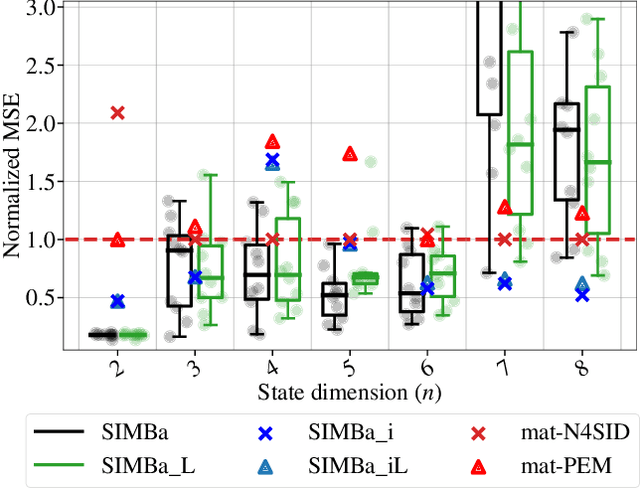
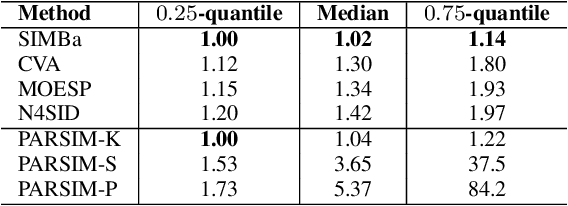
Machine Learning (ML) and linear System Identification (SI) have been historically developed independently. In this paper, we leverage well-established ML tools - especially the automatic differentiation framework - to introduce SIMBa, a family of discrete linear multi-step-ahead state-space SI methods using backpropagation. SIMBa relies on a novel Linear-Matrix-Inequality-based free parametrization of Schur matrices to ensure the stability of the identified model. We show how SIMBa generally outperforms traditional linear state-space SI methods, and sometimes significantly, although at the price of a higher computational burden. This performance gap is particularly remarkable compared to other SI methods with stability guarantees, where the gain is frequently above 25% in our investigations, hinting at SIMBa's ability to simultaneously achieve state-of-the-art fitting performance and enforce stability. Interestingly, these observations hold for a wide variety of input-output systems and on both simulated and real-world data, showcasing the flexibility of the proposed approach. We postulate that this new SI paradigm presents a great extension potential to identify structured nonlinear models from data, and we hence open-source SIMBa on https://github.com/Cemempamoi/simba.
Data-driven adaptive building thermal controller tuning with constraints: A primal-dual contextual Bayesian optimization approach
Oct 01, 2023



We study the problem of tuning the parameters of a room temperature controller to minimize its energy consumption, subject to the constraint that the daily cumulative thermal discomfort of the occupants is below a given threshold. We formulate it as an online constrained black-box optimization problem where, on each day, we observe some relevant environmental context and adaptively select the controller parameters. In this paper, we propose to use a data-driven Primal-Dual Contextual Bayesian Optimization (PDCBO) approach to solve this problem. In a simulation case study on a single room, we apply our algorithm to tune the parameters of a Proportional Integral (PI) heating controller and the pre-heating time. Our results show that PDCBO can save up to 4.7% energy consumption compared to other state-of-the-art Bayesian optimization-based methods while keeping the daily thermal discomfort below the given tolerable threshold on average. Additionally, PDCBO can automatically track time-varying tolerable thresholds while existing methods fail to do so. We then study an alternative constrained tuning problem where we aim to minimize the thermal discomfort with a given energy budget. With this formulation, PDCBO reduces the average discomfort by up to 63% compared to state-of-the-art safe optimization methods while keeping the average daily energy consumption below the required threshold.
Stochastic MPC for energy hubs using data driven demand forecasting
Apr 24, 2023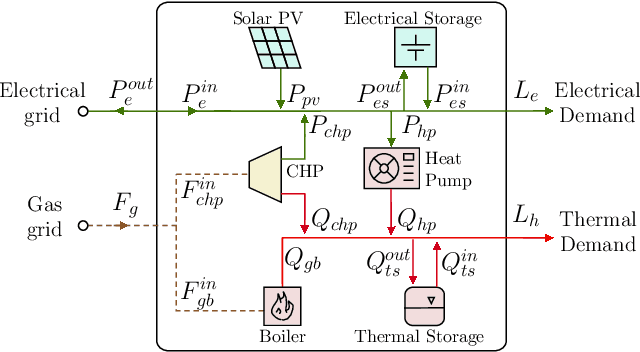
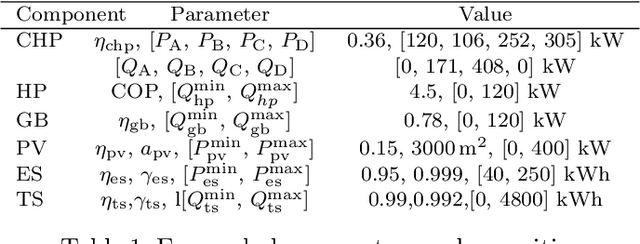
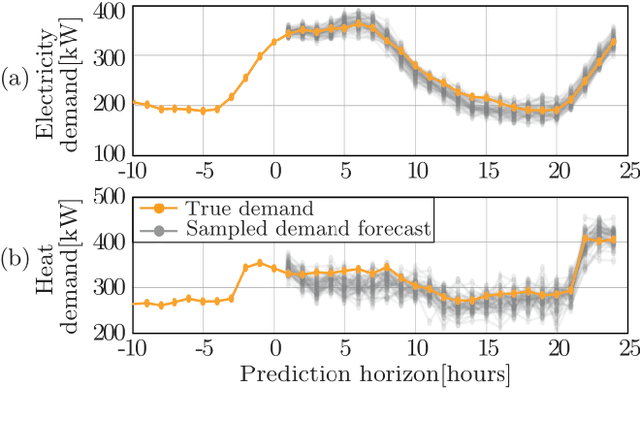
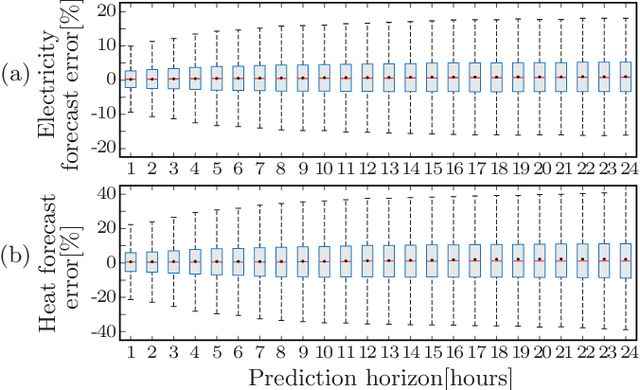
Energy hubs convert and distribute energy resources by combining different energy inputs through multiple conversion and storage components. The optimal operation of the energy hub exploits its flexibility to increase the energy efficiency and reduce the operational costs. However, uncertainties in the demand present challenges to energy hub optimization. In this paper, we propose a stochastic MPC controller to minimize energy costs using chance constraints for the uncertain electricity and thermal demands. Historical data is used to build a demand prediction model based on Gaussian processes to generate a forecast of the future electricity and heat demands. The stochastic optimization problem is solved via the Scenario Approach by sampling multi-step demand trajectories from the derived prediction model. The performance of the proposed predictor and of the stochastic controller is verified on a simulated energy hub model and demand data from a real building.
Towards Scalable Physically Consistent Neural Networks: an Application to Data-driven Multi-zone Thermal Building Models
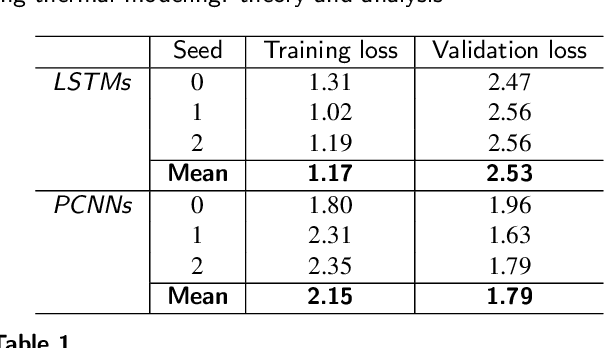
Dec 23, 2022With more and more data being collected, data-driven modeling methods have been gaining in popularity in recent years. While physically sound, classical gray-box models are often cumbersome to identify and scale, and their accuracy might be hindered by their limited expressiveness. On the other hand, classical black-box methods, typically relying on Neural Networks (NNs) nowadays, often achieve impressive performance, even at scale, by deriving statistical patterns from data. However, they remain completely oblivious to the underlying physical laws, which may lead to potentially catastrophic failures if decisions for real-world physical systems are based on them. Physically Consistent Neural Networks (PCNNs) were recently developed to address these aforementioned issues, ensuring physical consistency while still leveraging NNs to attain state-of-the-art accuracy. In this work, we scale PCNNs to model building temperature dynamics and propose a thorough comparison with classical gray-box and black-box methods. More precisely, we design three distinct PCNN extensions, thereby exemplifying the modularity and flexibility of the architecture, and formally prove their physical consistency. In the presented case study, PCNNs are shown to achieve state-of-the-art accuracy, even outperforming classical NN-based models despite their constrained structure. Our investigations furthermore provide a clear illustration of NNs achieving seemingly good performance while remaining completely physics-agnostic, which can be misleading in practice. While this performance comes at the cost of computational complexity, PCNNs on the other hand show accuracy improvements of 17-35% compared to all other physically consistent methods, paving the way for scalable physically consistent models with state-of-the-art performance.
Efficient Reinforcement Learning (ERL): Targeted Exploration Through Action Saturation
Nov 30, 2022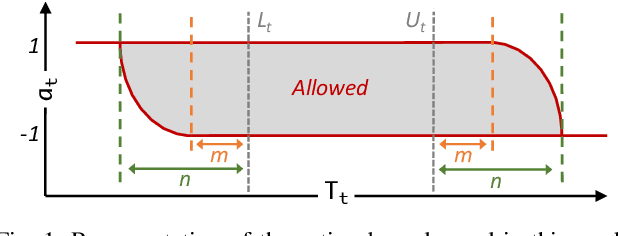



Reinforcement Learning (RL) generally suffers from poor sample complexity, mostly due to the need to exhaustively explore the state space to find good policies. On the other hand, we postulate that expert knowledge of the system to control often allows us to design simple rules we expect good policies to follow at all times. In this work, we hence propose a simple yet effective modification of continuous actor-critic RL frameworks to incorporate such prior knowledge in the learned policies and constrain them to regions of the state space that are deemed interesting, thereby significantly accelerating their convergence. Concretely, we saturate the actions chosen by the agent if they do not comply with our intuition and, critically, modify the gradient update step of the policy to ensure the learning process does not suffer from the saturation step. On a room temperature control simulation case study, these modifications allow agents to converge to well-performing policies up to one order of magnitude faster than classical RL agents while retaining good final performance.
Physically Consistent Neural ODEs for Learning Multi-Physics Systems
Nov 11, 2022Despite the immense success of neural networks in modeling system dynamics from data, they often remain physics-agnostic black boxes. In the particular case of physical systems, they might consequently make physically inconsistent predictions, which makes them unreliable in practice. In this paper, we leverage the framework of Irreversible port-Hamiltonian Systems (IPHS), which can describe most multi-physics systems, and rely on Neural Ordinary Differential Equations (NODEs) to learn their parameters from data. Since IPHS models are consistent with the first and second principles of thermodynamics by design, so are the proposed Physically Consistent NODEs (PC-NODEs). Furthermore, the NODE training procedure allows us to seamlessly incorporate prior knowledge of the system properties in the learned dynamics. We demonstrate the effectiveness of the proposed method by learning the thermodynamics of a building from the real-world measurements and the dynamics of a simulated gas-piston system. Thanks to the modularity and flexibility of the IPHS framework, PC-NODEs can be extended to learn physically consistent models of multi-physics distributed systems.
Near-optimal Deep Reinforcement Learning Policies from Data for Zone Temperature Control
Mar 10, 2022
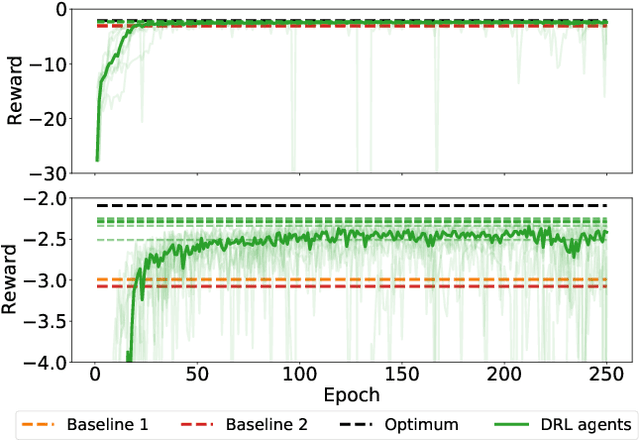


Replacing poorly performing existing controllers with smarter solutions will decrease the energy intensity of the building sector. Recently, controllers based on Deep Reinforcement Learning (DRL) have been shown to be more effective than conventional baselines. However, since the optimal solution is usually unknown, it is still unclear if DRL agents are attaining near-optimal performance in general or if there is still a large gap to bridge. In this paper, we investigate the performance of DRL agents compared to the theoretically optimal solution. To that end, we leverage Physically Consistent Neural Networks (PCNNs) as simulation environments, for which optimal control inputs are easy to compute. Furthermore, PCNNs solely rely on data to be trained, avoiding the difficult physics-based modeling phase, while retaining physical consistency. Our results hint that DRL agents not only clearly outperform conventional rule-based controllers, they furthermore attain near-optimal performance.
Physically Consistent Neural Networks for building thermal modeling: theory and analysis
Dec 06, 2021


Due to their high energy intensity, buildings play a major role in the current worldwide energy transition. Building models are ubiquitous since they are needed at each stage of the life of buildings, i.e. for design, retrofitting, and control operations. Classical white-box models, based on physical equations, are bound to follow the laws of physics but the specific design of their underlying structure might hinder their expressiveness and hence their accuracy. On the other hand, black-box models are better suited to capture nonlinear building dynamics and thus can often achieve better accuracy, but they require a lot of data and might not follow the laws of physics, a problem that is particularly common for neural network (NN) models. To counter this known generalization issue, physics-informed NNs have recently been introduced, where researchers introduce prior knowledge in the structure of NNs to ground them in known underlying physical laws and avoid classical NN generalization issues. In this work, we present a novel physics-informed NN architecture, dubbed Physically Consistent NN (PCNN), which only requires past operational data and no engineering overhead, including prior knowledge in a linear module running in parallel to a classical NN. We formally prove that such networks are physically consistent -- by design and even on unseen data -- with respect to different control inputs and temperatures outside and in neighboring zones. We demonstrate their performance on a case study, where the PCNN attains an accuracy up to $50\%$ better than a classical physics-based resistance-capacitance model on $3$-day long prediction horizons. Furthermore, despite their constrained structure, PCNNs attain similar performance to classical NNs on the validation data, overfitting the training data less and retaining high expressiveness to tackle the generalization issue.
Physics-informed linear regression is a competitive approach compared to Machine Learning methods in building MPC
Oct 29, 2021



Because physics-based building models are difficult to obtain as each building is individual, there is an increasing interest in generating models suitable for building MPC directly from measurement data. Machine learning methods have been widely applied to this problem and validated mostly in simulation; there are, however, few studies on a direct comparison of different models or validation in real buildings to be found in the literature. Methods that are indeed validated in application often lead to computationally complex non-convex optimization problems. Here we compare physics-informed Autoregressive-Moving-Average with Exogenous Inputs (ARMAX) models to Machine Learning models based on Random Forests and Input Convex Neural Networks and the resulting convex MPC schemes in experiments on a practical building application with the goal of minimizing energy consumption while maintaining occupant comfort, and in a numerical case study. We demonstrate that Predictive Control in general leads to savings between 26% and 49% of heating and cooling energy, compared to the building's baseline hysteresis controller. Moreover, we show that all model types lead to satisfactory control performance in terms of constraint satisfaction and energy reduction. However, we also see that the physics-informed ARMAX models have a lower computational burden, and a superior sample efficiency compared to the Machine Learning based models. Moreover, even if abundant training data is available, the ARMAX models have a significantly lower prediction error than the Machine Learning models, which indicates that the encoded physics-based prior of the former cannot independently be found by the latter.
Input Convex Neural Networks for Building MPC
Nov 26, 2020


Model Predictive Control in buildings can significantly reduce their energy consumption. The cost and effort necessary for creating and maintaining first principle models for buildings make data-driven modelling an attractive alternative in this domain. In MPC the models form the basis for an optimization problem whose solution provides the control signals to be applied to the system. The fact that this optimization problem has to be solved repeatedly in real-time implies restrictions on the learning architectures that can be used. Here, we adapt Input Convex Neural Networks that are generally only convex for one-step predictions, for use in building MPC. We introduce additional constraints to their structure and weights to achieve a convex input-output relationship for multistep ahead predictions. We assess the consequences of the additional constraints for the model accuracy and test the models in a real-life MPC experiment in an apartment in Switzerland. In two five-day cooling experiments, MPC with Input Convex Neural Networks is able to keep room temperatures within comfort constraints while minimizing cooling energy consumption.