 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInput Convex Neural Networks for Building MPC
Paper and Code
Nov 26, 2020
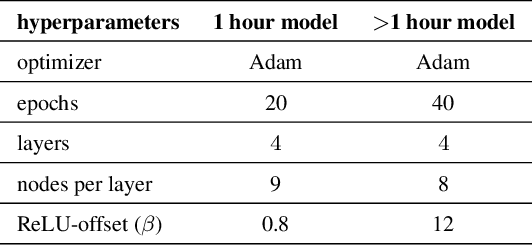


Model Predictive Control in buildings can significantly reduce their energy consumption. The cost and effort necessary for creating and maintaining first principle models for buildings make data-driven modelling an attractive alternative in this domain. In MPC the models form the basis for an optimization problem whose solution provides the control signals to be applied to the system. The fact that this optimization problem has to be solved repeatedly in real-time implies restrictions on the learning architectures that can be used. Here, we adapt Input Convex Neural Networks that are generally only convex for one-step predictions, for use in building MPC. We introduce additional constraints to their structure and weights to achieve a convex input-output relationship for multistep ahead predictions. We assess the consequences of the additional constraints for the model accuracy and test the models in a real-life MPC experiment in an apartment in Switzerland. In two five-day cooling experiments, MPC with Input Convex Neural Networks is able to keep room temperatures within comfort constraints while minimizing cooling energy consumption.