 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferability Through Cooperative Competitions
Mar 29, 2026This paper presents a novel framework for cooperative robotics competitions (coopetitions) that promote the transferability and composability of robotics modules, including software, hardware, and data, across heterogeneous robotic systems. The framework is designed to incentivize collaboration between teams through structured task design, shared infrastructure, and a royalty-based scoring system. As a case study, the paper details the implementation and outcomes of the first euROBIN Coopetition, held under the European Robotics and AI Network (euROBIN), which featured fifteen robotic platforms competing across Industrial, Service, and Outdoor domains. The study highlights the practical challenges of achieving module reuse in real-world scenarios, particularly in terms of integration complexity and system compatibility. It also examines participant performance, integration behavior, and team feedback to assess the effectiveness of the framework. The paper concludes with lessons learned and recommendations for future coopetitions, including improveme
Deep Optical Coding Design in Computational Imaging
Jun 27, 2022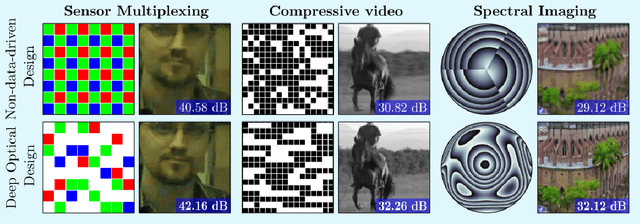
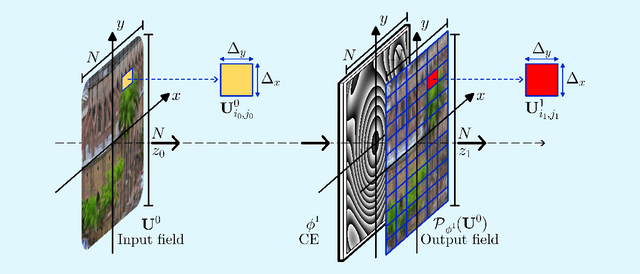
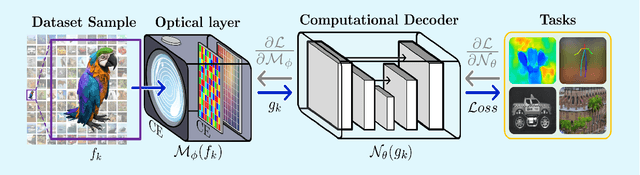
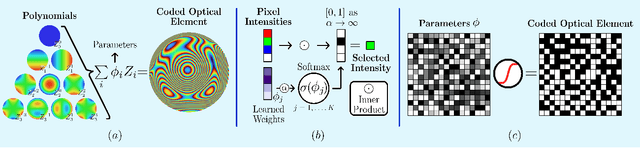
Computational optical imaging (COI) systems leverage optical coding elements (CE) in their setups to encode a high-dimensional scene in a single or multiple snapshots and decode it by using computational algorithms. The performance of COI systems highly depends on the design of its main components: the CE pattern and the computational method used to perform a given task. Conventional approaches rely on random patterns or analytical designs to set the distribution of the CE. However, the available data and algorithm capabilities of deep neural networks (DNNs) have opened a new horizon in CE data-driven designs that jointly consider the optical encoder and computational decoder. Specifically, by modeling the COI measurements through a fully differentiable image formation model that considers the physics-based propagation of light and its interaction with the CEs, the parameters that define the CE and the computational decoder can be optimized in an end-to-end (E2E) manner. Moreover, by optimizing just CEs in the same framework, inference tasks can be performed from pure optics. This work surveys the recent advances on CE data-driven design and provides guidelines on how to parametrize different optical elements to include them in the E2E framework. Since the E2E framework can handle different inference applications by changing the loss function and the DNN, we present low-level tasks such as spectral imaging reconstruction or high-level tasks such as pose estimation with privacy preserving enhanced by using optimal task-based optical architectures. Finally, we illustrate classification and 3D object recognition applications performed at the speed of the light using all-optics DNN.
Towards Remote Robotic Competitions: An Internet-Connected Task Board and Dashboard
Jan 24, 2022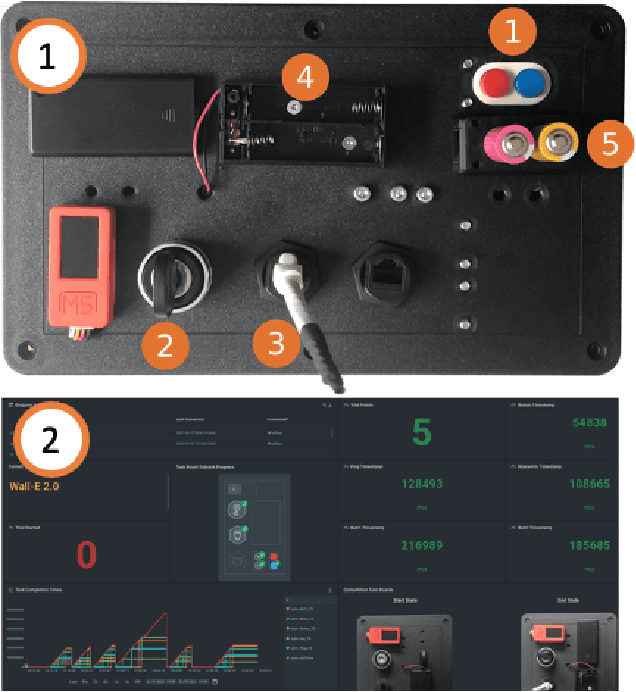
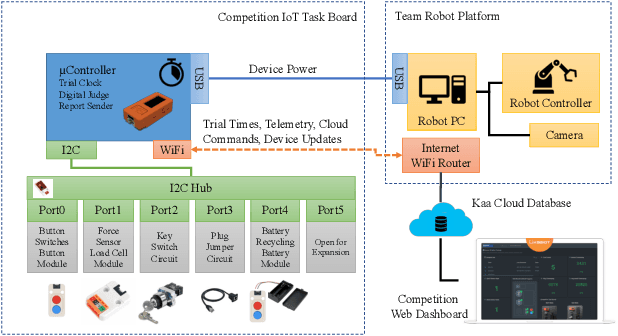
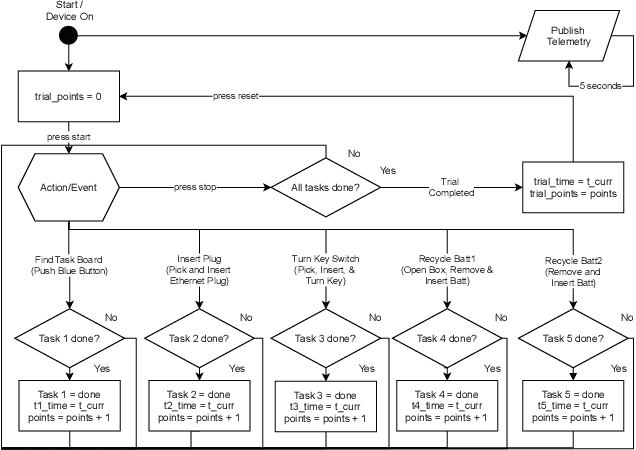
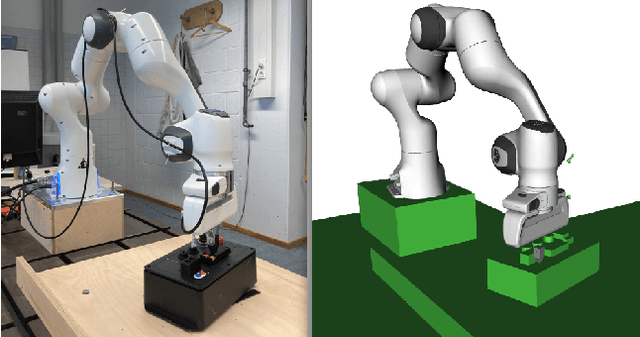
In this work we present a platform to assess robot platform skills using an internet-of-things (IoT) task board device to aggregate performances across remote sites. We demonstrate a concept for a modular, scale-able device and web dashboard enabling remote competitions as an alternative to in-person robot competitions. We share data from nine robot platforms located across four continents in three manipulation task categories of object localization, object insertion, and component disassembly through an organized international robot competition - the Robothon Grand Challenge. This paper discusses the design of an electronic task board, the strategies implemented by the top-performing teams and compares their results with a benchmark solution to the presented task board. Through this platform, we demonstrate fully remote, online competitions can generate innovative robotic solutions and tested a tool for measuring remote performances. Using the open-sourced task board code and design files, the reader can reproduce the benchmark solution or configure the platform for their own use case and share their results transparently without transporting their robot platform.