 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Remote Robotic Competitions: An Internet-Connected Task Board and Dashboard
Paper and Code
Jan 24, 2022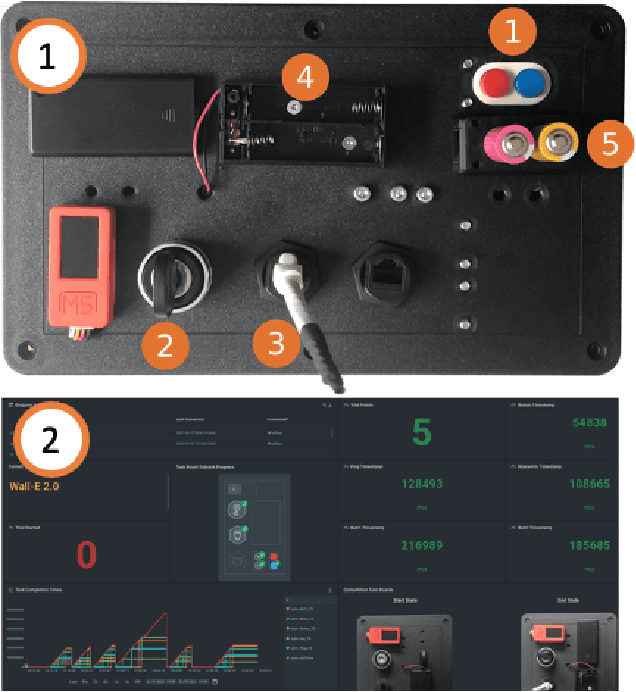
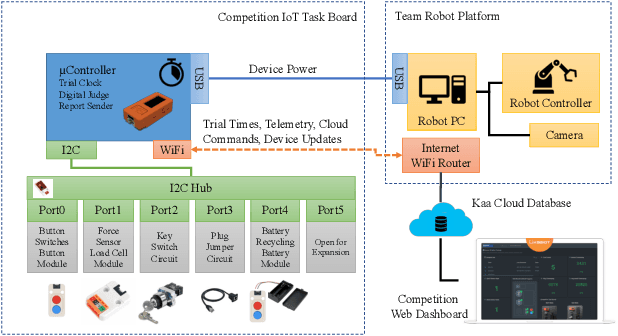
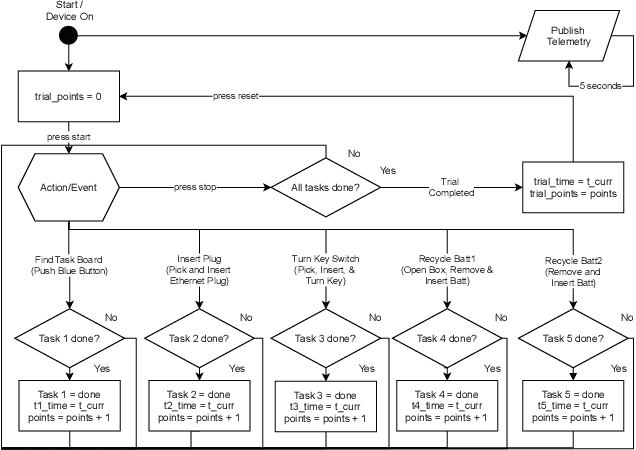
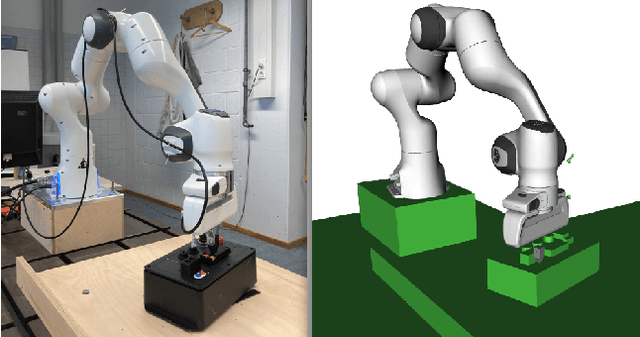
In this work we present a platform to assess robot platform skills using an internet-of-things (IoT) task board device to aggregate performances across remote sites. We demonstrate a concept for a modular, scale-able device and web dashboard enabling remote competitions as an alternative to in-person robot competitions. We share data from nine robot platforms located across four continents in three manipulation task categories of object localization, object insertion, and component disassembly through an organized international robot competition - the Robothon Grand Challenge. This paper discusses the design of an electronic task board, the strategies implemented by the top-performing teams and compares their results with a benchmark solution to the presented task board. Through this platform, we demonstrate fully remote, online competitions can generate innovative robotic solutions and tested a tool for measuring remote performances. Using the open-sourced task board code and design files, the reader can reproduce the benchmark solution or configure the platform for their own use case and share their results transparently without transporting their robot platform.