 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentralized vs. Decoupled Dual-Arm Planning Taking into Account Path Quality
Jan 16, 2024The aim of coordinated planning is to avoid robot-to-robot collisions in a multi-robot system, and there are two standard solution approaches: centralized planning and decoupled planning. Our first contribution is a decoupled planning approach that ensures C2-continuous control commands with zero velocities at the start and goal. We benchmark our decoupled approach with a centralized approach. Contrary to literature, we show that for a standard motion planning pipeline, such as the one used by MoveIt!, centralized planning is superior to decoupled planning in dual-arm manipulation: It has a lower computation time and a higher robustness. Our second contribution is an optimization that minimizes the rotational motion of an end-effector while considering obstacle avoidance. We derive the analytic gradients of this optimization problem, making the algorithm suitable for online motion planning. Our optimization extends an existing path quality improvement method. Integrating it into our decoupled approach overcomes its shortcomings and provides a motion planning pipeline that is robust at up to 99.9% with a planning time of less than 1s and that computes high-quality paths.
Energy-Aware Hierarchical Control of Joint Velocities
Dec 18, 2023Nowadays, robots are applied in dynamic environments. For a robust operation, the motion planning module must consider other tasks besides reaching a specified pose: (self) collision avoidance, joint limit avoidance, keeping an advantageous configuration, etc. Each task demands different joint control commands, which may counteract each other. We present a hierarchical control that, depending on the robot and environment state, determines online a suitable priority among those tasks. Thereby, the control command of a lower-prioritized task never hinders the control command of a higher-prioritized task. We ensure smooth control signals also during priority rearrangement. Our hierarchical control computes reference joint velocities. However, the underlying concepts of hierarchical control differ when using joint accelerations or joint torques as control signals instead. So, as a further contribution, we provide a comprehensive discussion on how joint velocity control, joint acceleration control, and joint torque control differ in hierarchical task control. We validate our formulation in an experiment on hardware.
Towards Remote Robotic Competitions: An Internet-Connected Task Board and Dashboard
Jan 24, 2022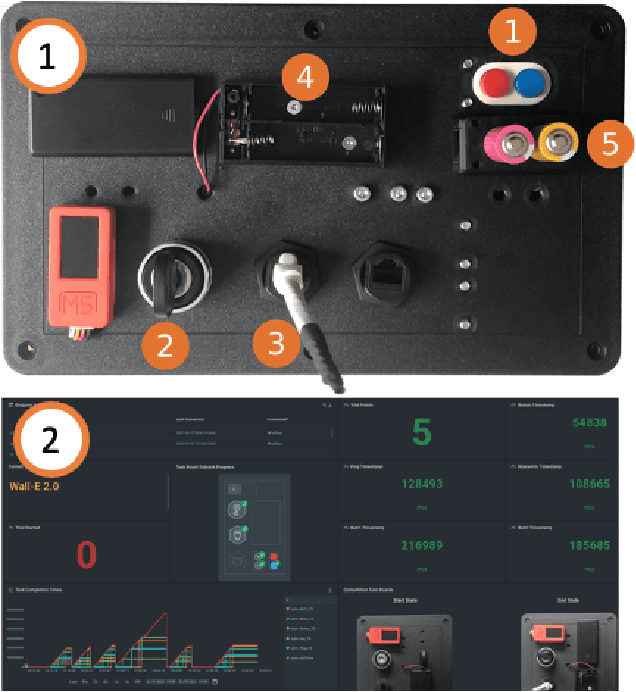
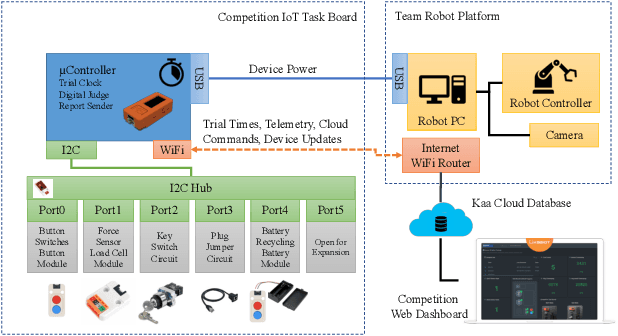
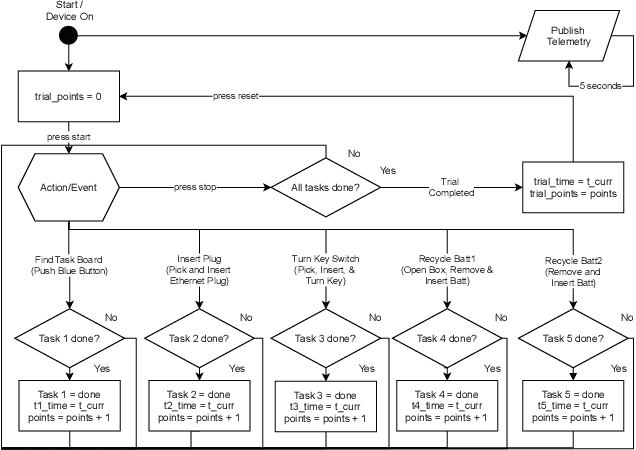
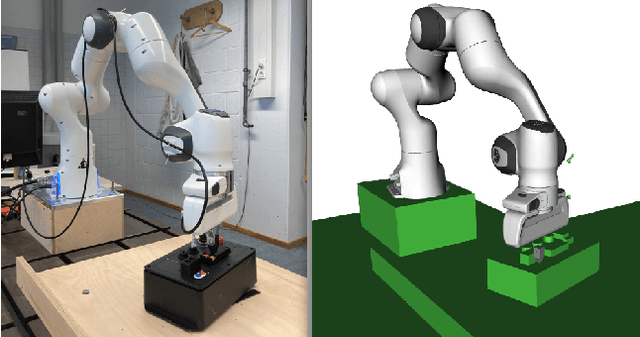
In this work we present a platform to assess robot platform skills using an internet-of-things (IoT) task board device to aggregate performances across remote sites. We demonstrate a concept for a modular, scale-able device and web dashboard enabling remote competitions as an alternative to in-person robot competitions. We share data from nine robot platforms located across four continents in three manipulation task categories of object localization, object insertion, and component disassembly through an organized international robot competition - the Robothon Grand Challenge. This paper discusses the design of an electronic task board, the strategies implemented by the top-performing teams and compares their results with a benchmark solution to the presented task board. Through this platform, we demonstrate fully remote, online competitions can generate innovative robotic solutions and tested a tool for measuring remote performances. Using the open-sourced task board code and design files, the reader can reproduce the benchmark solution or configure the platform for their own use case and share their results transparently without transporting their robot platform.