 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFASTC: A Fast Attentional Framework for Semantic Traversability Classification Using Point Cloud
Jun 24, 2024


Producing traversability maps and understanding the surroundings are crucial prerequisites for autonomous navigation. In this paper, we address the problem of traversability assessment using point clouds. We propose a novel pillar feature extraction module that utilizes PointNet to capture features from point clouds organized in vertical volume and a 2D encoder-decoder structure to conduct traversability classification instead of the widely used 3D convolutions. This results in less computational cost while even better performance is achieved at the same time. We then propose a new spatio-temporal attention module to fuse multi-frame information, which can properly handle the varying density problem of LIDAR point clouds, and this makes our module able to assess distant areas more accurately. Comprehensive experimental results on augmented Semantic KITTI and RELLIS-3D datasets show that our method is able to achieve superior performance over existing approaches both quantitatively and quantitatively.
Online LiDAR-Camera Extrinsic Parameters Self-checking
Oct 19, 2022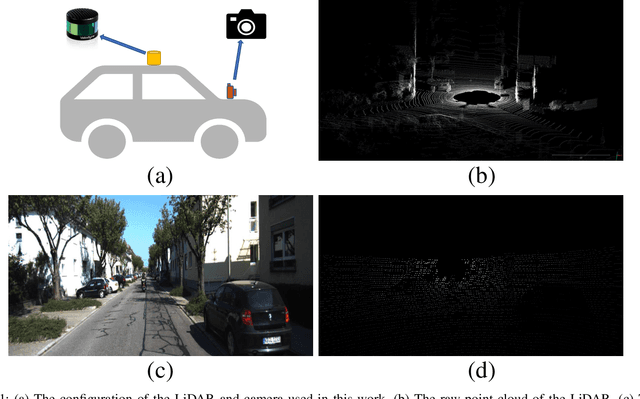
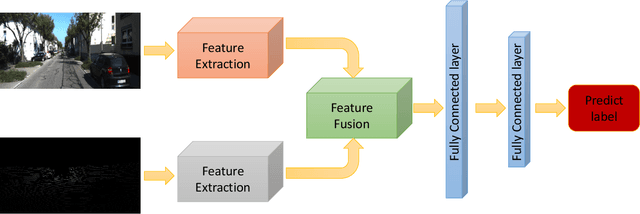
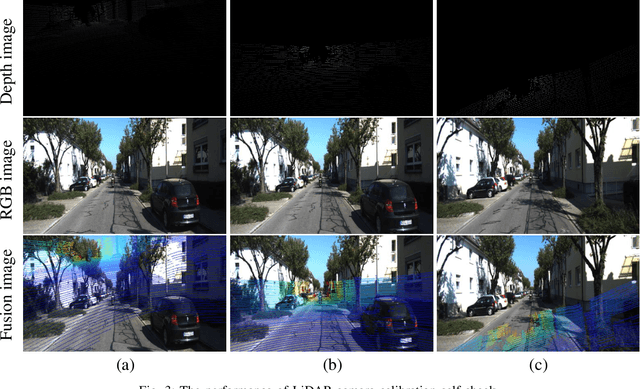
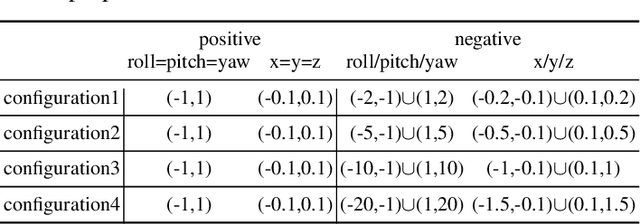
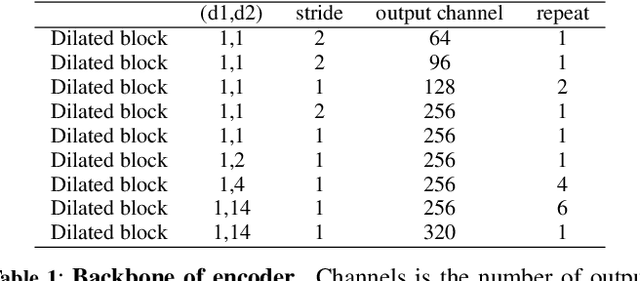
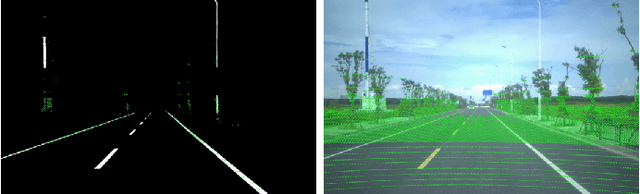
With the development of neural networks and the increasing popularity of automatic driving, the calibration of the LiDAR and the camera has attracted more and more attention. This calibration task is multi-modal, where the rich color and texture information captured by the camera and the accurate three-dimensional spatial information from the LiDAR is incredibly significant for downstream tasks. Current research interests mainly focus on obtaining accurate calibration results through information fusion. However, they seldom analyze whether the calibrated results are correct or not, which could be of significant importance in real-world applications. For example, in large-scale production, the LiDARs and the cameras of each smart car have to get well-calibrated as the car leaves the production line, while in the rest of the car life period, the poses of the LiDARs and cameras should also get continually supervised to ensure the security. To this end, this paper proposes a self-checking algorithm to judge whether the extrinsic parameters are well-calibrated by introducing a binary classification network based on the fused information from the camera and the LiDAR. Moreover, since there is no such dataset for the task in this work, we further generate a new dataset branch from the KITTI dataset tailored for the task. Our experiments on the proposed dataset branch demonstrate the performance of our method. To the best of our knowledge, this is the first work to address the significance of continually checking the calibrated extrinsic parameters for autonomous driving. The code is open-sourced on the Github website at https://github.com/OpenCalib/LiDAR2camera_self-check.
OpenCalib: A Multi-sensor Calibration Toolbox for Autonomous Driving
May 30, 2022
Accurate sensor calibration is a prerequisite for multi-sensor perception and localization systems for autonomous vehicles. The intrinsic parameter calibration of the sensor is to obtain the mapping relationship inside the sensor, and the extrinsic parameter calibration is to transform two or more sensors into a unified spatial coordinate system. Most sensors need to be calibrated after installation to ensure the accuracy of sensor measurements. To this end, we present OpenCalib, a calibration toolbox that contains a rich set of various sensor calibration methods. OpenCalib covers manual calibration tools, automatic calibration tools, factory calibration tools, and online calibration tools for different application scenarios. At the same time, to evaluate the calibration accuracy and subsequently improve the accuracy of the calibration algorithm, we released a corresponding benchmark dataset. This paper introduces various features and calibration methods of this toolbox. To our knowledge, this is the first open-sourced calibration codebase containing the full set of autonomous-driving-related calibration approaches in this area. We wish that the toolbox could be helpful to autonomous driving researchers. We have open-sourced our code on GitHub to benefit the community. Code is available at https://github.com/PJLab-ADG/SensorsCalibration.
CROON: Automatic Multi-LiDAR Calibration and Refinement Method in Road Scene
Mar 07, 2022



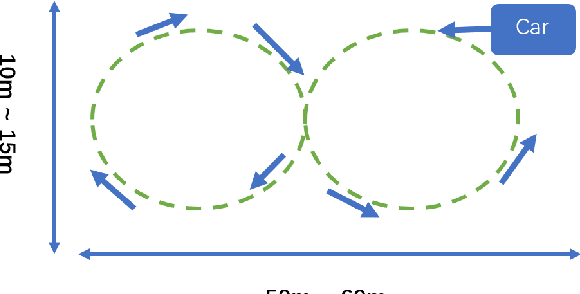
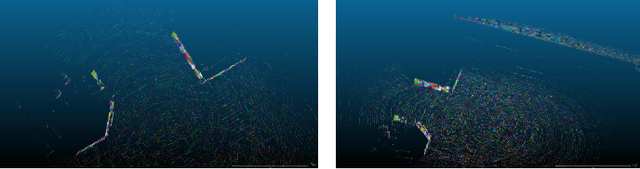
Sensor-based environmental perception is a crucial part of the autonomous driving system. In order to get an excellent perception of the surrounding environment, an intelligent system would configure multiple LiDARs (3D Light Detection and Ranging) to cover the distant and near space of the car. The precision of perception relies on the quality of sensor calibration. This research aims at developing an accurate, automatic, and robust calibration strategy for multiple LiDAR systems in the general road scene. We thus propose CROON (automatiC multi-LiDAR CalibratiOn and Refinement method in rOad sceNe), a two-stage method including rough and refinement calibration. The first stage can calibrate the sensor from an arbitrary initial pose, and the second stage is able to precisely calibrate the sensor iteratively. Specifically, CROON utilize the nature characteristics of road scene so that it is independent and easy to apply in large-scale conditions. Experimental results on real-world and simulated data sets demonstrate the reliability and accuracy of our method. All the related data sets and codes are open-sourced on the Github website https://github.com/OpenCalib/LiDAR2LiDAR.