 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVox-Fusion: Dense Tracking and Mapping with Voxel-based Neural Implicit Representation
Oct 28, 2022In this work, we present a dense tracking and mapping system named Vox-Fusion, which seamlessly fuses neural implicit representations with traditional volumetric fusion methods. Our approach is inspired by the recently developed implicit mapping and positioning system and further extends the idea so that it can be freely applied to practical scenarios. Specifically, we leverage a voxel-based neural implicit surface representation to encode and optimize the scene inside each voxel. Furthermore, we adopt an octree-based structure to divide the scene and support dynamic expansion, enabling our system to track and map arbitrary scenes without knowing the environment like in previous works. Moreover, we proposed a high-performance multi-process framework to speed up the method, thus supporting some applications that require real-time performance. The evaluation results show that our methods can achieve better accuracy and completeness than previous methods. We also show that our Vox-Fusion can be used in augmented reality and virtual reality applications. Our source code is publicly available at https://github.com/zju3dv/Vox-Fusion.
Vox-Surf: Voxel-based Implicit Surface Representation
Aug 21, 2022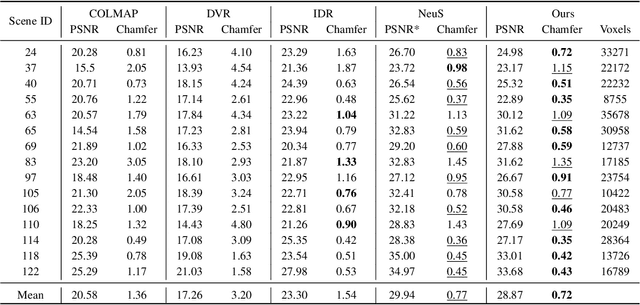
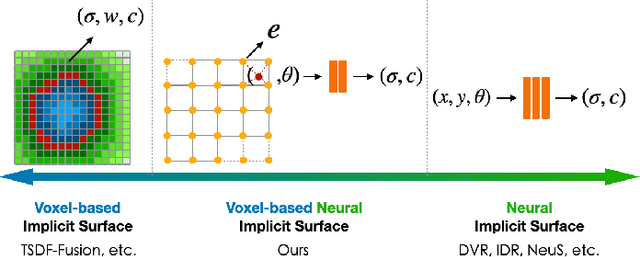
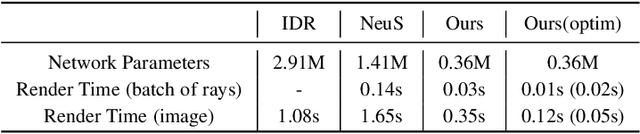
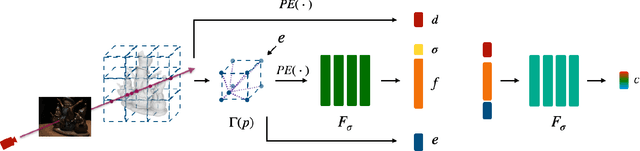
Virtual content creation and interaction play an important role in modern 3D applications such as AR and VR. Recovering detailed 3D models from real scenes can significantly expand the scope of its applications and has been studied for decades in the computer vision and computer graphics community. We propose Vox-Surf, a voxel-based implicit surface representation. Our Vox-Surf divides the space into finite bounded voxels. Each voxel stores geometry and appearance information in its corner vertices. Vox-Surf is suitable for almost any scenario thanks to sparsity inherited from voxel representation and can be easily trained from multiple view images. We leverage the progressive training procedure to extract important voxels gradually for further optimization so that only valid voxels are preserved, which greatly reduces the number of sampling points and increases rendering speed.The fine voxels can also be considered as the bounding volume for collision detection.The experiments show that Vox-Surf representation can learn delicate surface details and accurate color with less memory and faster rendering speed than other methods.We also show that Vox-Surf can be more practical in scene editing and AR applications.
OpenCalib: A Multi-sensor Calibration Toolbox for Autonomous Driving
May 30, 2022
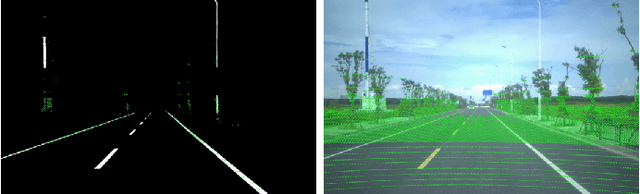
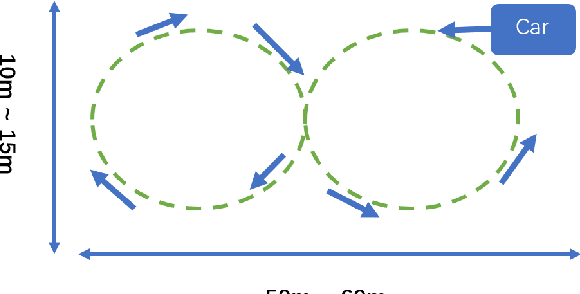
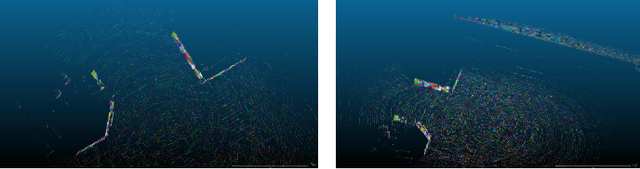
Accurate sensor calibration is a prerequisite for multi-sensor perception and localization systems for autonomous vehicles. The intrinsic parameter calibration of the sensor is to obtain the mapping relationship inside the sensor, and the extrinsic parameter calibration is to transform two or more sensors into a unified spatial coordinate system. Most sensors need to be calibrated after installation to ensure the accuracy of sensor measurements. To this end, we present OpenCalib, a calibration toolbox that contains a rich set of various sensor calibration methods. OpenCalib covers manual calibration tools, automatic calibration tools, factory calibration tools, and online calibration tools for different application scenarios. At the same time, to evaluate the calibration accuracy and subsequently improve the accuracy of the calibration algorithm, we released a corresponding benchmark dataset. This paper introduces various features and calibration methods of this toolbox. To our knowledge, this is the first open-sourced calibration codebase containing the full set of autonomous-driving-related calibration approaches in this area. We wish that the toolbox could be helpful to autonomous driving researchers. We have open-sourced our code on GitHub to benefit the community. Code is available at https://github.com/PJLab-ADG/SensorsCalibration.