 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenCalib: A Multi-sensor Calibration Toolbox for Autonomous Driving
May 30, 2022
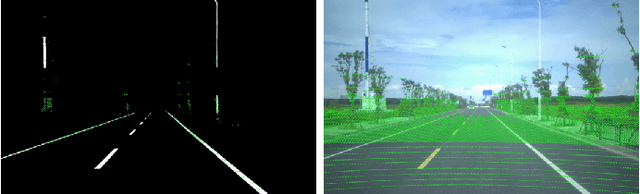
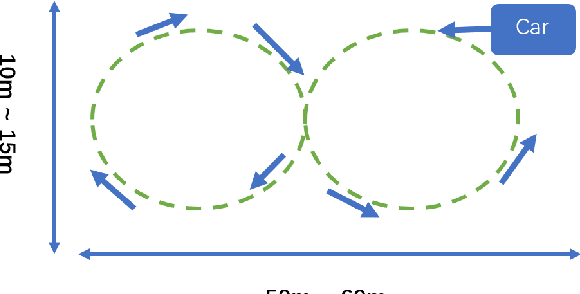
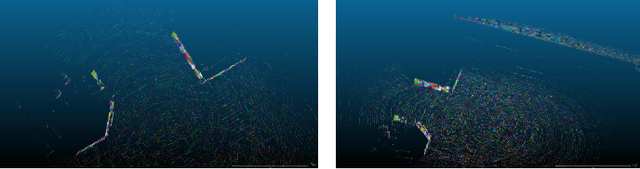
Accurate sensor calibration is a prerequisite for multi-sensor perception and localization systems for autonomous vehicles. The intrinsic parameter calibration of the sensor is to obtain the mapping relationship inside the sensor, and the extrinsic parameter calibration is to transform two or more sensors into a unified spatial coordinate system. Most sensors need to be calibrated after installation to ensure the accuracy of sensor measurements. To this end, we present OpenCalib, a calibration toolbox that contains a rich set of various sensor calibration methods. OpenCalib covers manual calibration tools, automatic calibration tools, factory calibration tools, and online calibration tools for different application scenarios. At the same time, to evaluate the calibration accuracy and subsequently improve the accuracy of the calibration algorithm, we released a corresponding benchmark dataset. This paper introduces various features and calibration methods of this toolbox. To our knowledge, this is the first open-sourced calibration codebase containing the full set of autonomous-driving-related calibration approaches in this area. We wish that the toolbox could be helpful to autonomous driving researchers. We have open-sourced our code on GitHub to benefit the community. Code is available at https://github.com/PJLab-ADG/SensorsCalibration.
Joint Camera Intrinsic and LiDAR-Camera Extrinsic Calibration
Feb 28, 2022

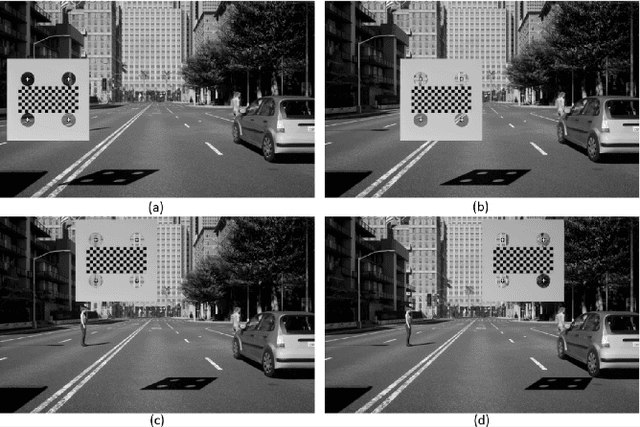
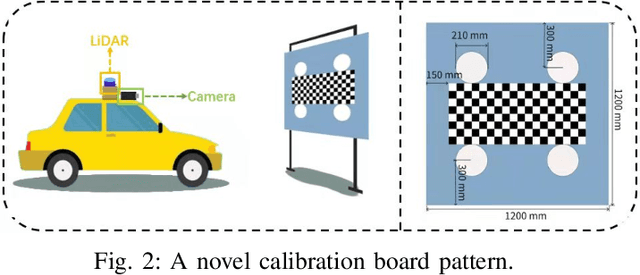
Sensor-based environmental perception is a crucial step for autonomous driving systems, for which an accurate calibration between multiple sensors plays a critical role. For the calibration of LiDAR and camera, the existing method is generally to calibrate the intrinsic of the camera first and then calibrate the extrinsic of the LiDAR and camera. If the camera's intrinsic is not calibrated correctly in the first stage, it isn't easy to calibrate the LiDAR-camera extrinsic accurately. Due to the complex internal structure of the camera and the lack of an effective quantitative evaluation method for the camera's intrinsic calibration, in the actual calibration, the accuracy of extrinsic parameter calibration is often reduced due to the tiny error of the camera's intrinsic parameters. To this end, we propose a novel target-based joint calibration method of the camera intrinsic and LiDAR-camera extrinsic parameters. Firstly, we design a novel calibration board pattern, adding four circular holes around the checkerboard for locating the LiDAR pose. Subsequently, a cost function defined under the reprojection constraints of the checkerboard and circular holes features is designed to solve the camera's intrinsic parameters, distortion factor, and LiDAR-camera extrinsic parameter. In the end, quantitative and qualitative experiments are conducted in actual and simulated environments, and the result shows the proposed method can achieve accuracy and robustness performance. The open-source code is available at https://github.com/OpenCalib/JointCalib.