 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenCalib: A Multi-sensor Calibration Toolbox for Autonomous Driving
May 30, 2022
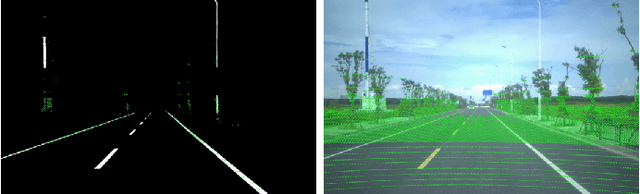
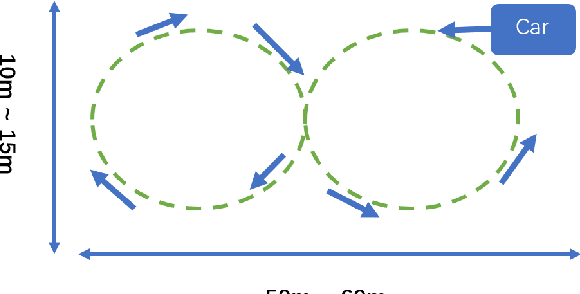
Accurate sensor calibration is a prerequisite for multi-sensor perception and localization systems for autonomous vehicles. The intrinsic parameter calibration of the sensor is to obtain the mapping relationship inside the sensor, and the extrinsic parameter calibration is to transform two or more sensors into a unified spatial coordinate system. Most sensors need to be calibrated after installation to ensure the accuracy of sensor measurements. To this end, we present OpenCalib, a calibration toolbox that contains a rich set of various sensor calibration methods. OpenCalib covers manual calibration tools, automatic calibration tools, factory calibration tools, and online calibration tools for different application scenarios. At the same time, to evaluate the calibration accuracy and subsequently improve the accuracy of the calibration algorithm, we released a corresponding benchmark dataset. This paper introduces various features and calibration methods of this toolbox. To our knowledge, this is the first open-sourced calibration codebase containing the full set of autonomous-driving-related calibration approaches in this area. We wish that the toolbox could be helpful to autonomous driving researchers. We have open-sourced our code on GitHub to benefit the community. Code is available at https://github.com/PJLab-ADG/SensorsCalibration.