 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFASTC: A Fast Attentional Framework for Semantic Traversability Classification Using Point Cloud
Paper and Code

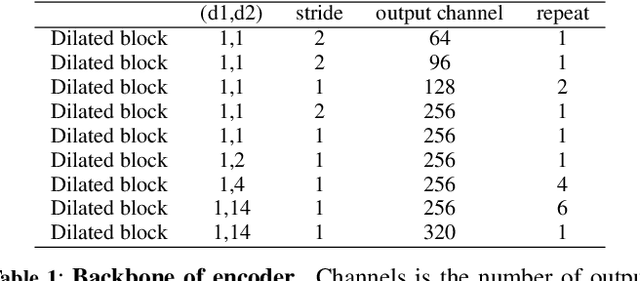


Producing traversability maps and understanding the surroundings are crucial prerequisites for autonomous navigation. In this paper, we address the problem of traversability assessment using point clouds. We propose a novel pillar feature extraction module that utilizes PointNet to capture features from point clouds organized in vertical volume and a 2D encoder-decoder structure to conduct traversability classification instead of the widely used 3D convolutions. This results in less computational cost while even better performance is achieved at the same time. We then propose a new spatio-temporal attention module to fuse multi-frame information, which can properly handle the varying density problem of LIDAR point clouds, and this makes our module able to assess distant areas more accurately. Comprehensive experimental results on augmented Semantic KITTI and RELLIS-3D datasets show that our method is able to achieve superior performance over existing approaches both quantitatively and quantitatively.