 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResisting Stochastic Risks in Diffusion Planners with the Trajectory Aggregation Tree
May 28, 2024Diffusion planners have shown promise in handling long-horizon and sparse-reward tasks due to the non-autoregressive plan generation. However, their inherent stochastic risk of generating infeasible trajectories presents significant challenges to their reliability and stability. We introduce a novel approach, the Trajectory Aggregation Tree (TAT), to address this issue in diffusion planners. Compared to prior methods that rely solely on raw trajectory predictions, TAT aggregates information from both historical and current trajectories, forming a dynamic tree-like structure. Each trajectory is conceptualized as a branch and individual states as nodes. As the structure evolves with the integration of new trajectories, unreliable states are marginalized, and the most impactful nodes are prioritized for decision-making. TAT can be deployed without modifying the original training and sampling pipelines of diffusion planners, making it a training-free, ready-to-deploy solution. We provide both theoretical analysis and empirical evidence to support TAT's effectiveness. Our results highlight its remarkable ability to resist the risk from unreliable trajectories, guarantee the performance boosting of diffusion planners in $100\%$ of tasks, and exhibit an appreciable tolerance margin for sample quality, thereby enabling planning with a more than $3\times$ acceleration.
Towards General Computer Control: A Multimodal Agent for Red Dead Redemption II as a Case Study
Mar 07, 2024Despite the success in specific tasks and scenarios, existing foundation agents, empowered by large models (LMs) and advanced tools, still cannot generalize to different scenarios, mainly due to dramatic differences in the observations and actions across scenarios. In this work, we propose the General Computer Control (GCC) setting: building foundation agents that can master any computer task by taking only screen images (and possibly audio) of the computer as input, and producing keyboard and mouse operations as output, similar to human-computer interaction. The main challenges of achieving GCC are: 1) the multimodal observations for decision-making, 2) the requirements of accurate control of keyboard and mouse, 3) the need for long-term memory and reasoning, and 4) the abilities of efficient exploration and self-improvement. To target GCC, we introduce Cradle, an agent framework with six main modules, including: 1) information gathering to extract multi-modality information, 2) self-reflection to rethink past experiences, 3) task inference to choose the best next task, 4) skill curation for generating and updating relevant skills for given tasks, 5) action planning to generate specific operations for keyboard and mouse control, and 6) memory for storage and retrieval of past experiences and known skills. To demonstrate the capabilities of generalization and self-improvement of Cradle, we deploy it in the complex AAA game Red Dead Redemption II, serving as a preliminary attempt towards GCC with a challenging target. To our best knowledge, our work is the first to enable LMM-based agents to follow the main storyline and finish real missions in complex AAA games, with minimal reliance on prior knowledge or resources. The project website is at https://baai-agents.github.io/Cradle/.
Neuromorphic Auditory Perception by Neural Spiketrum
Sep 11, 2023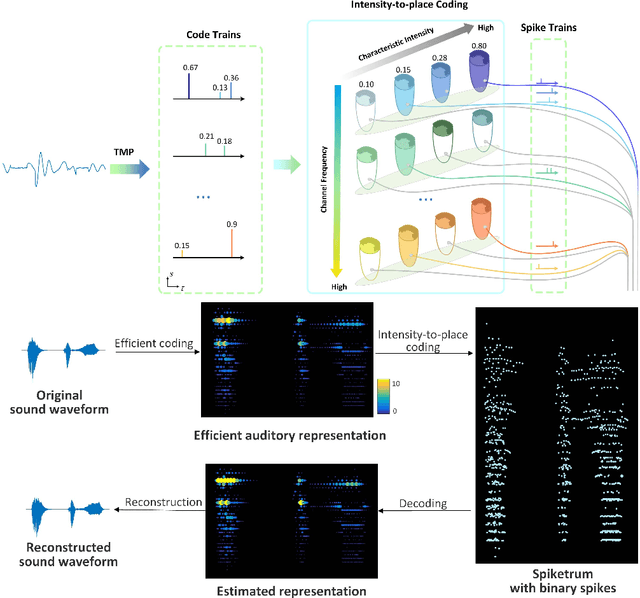
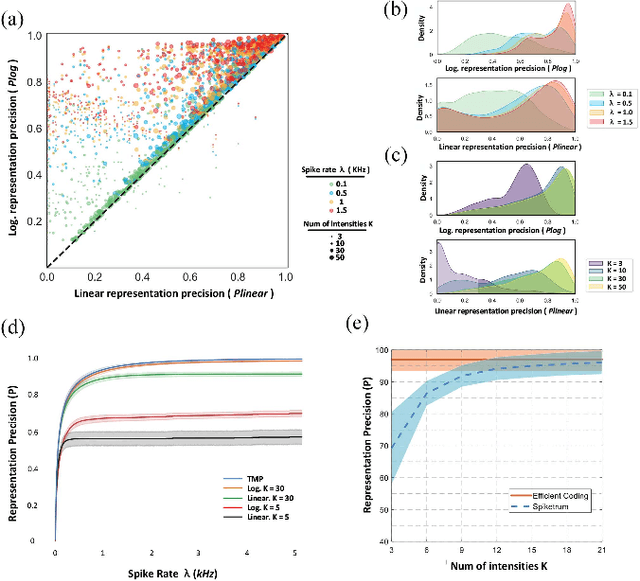
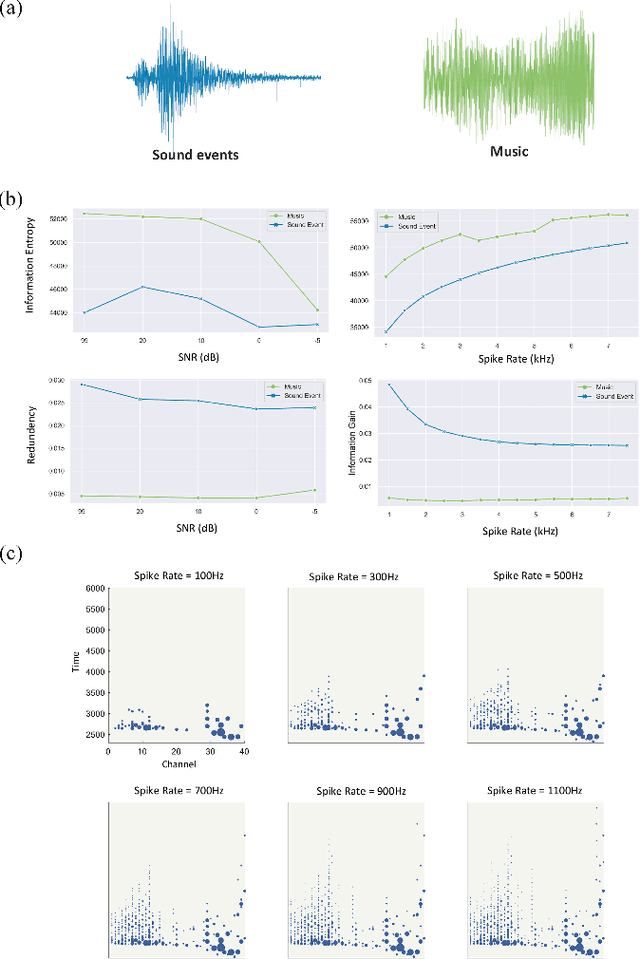
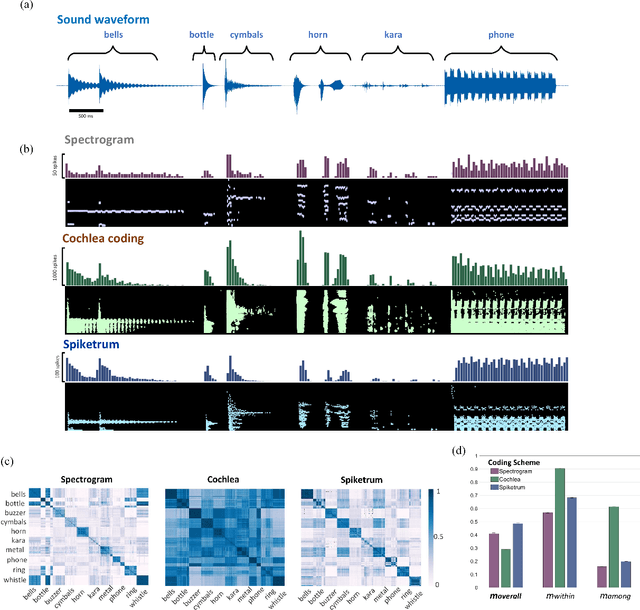
Neuromorphic computing holds the promise to achieve the energy efficiency and robust learning performance of biological neural systems. To realize the promised brain-like intelligence, it needs to solve the challenges of the neuromorphic hardware architecture design of biological neural substrate and the hardware amicable algorithms with spike-based encoding and learning. Here we introduce a neural spike coding model termed spiketrum, to characterize and transform the time-varying analog signals, typically auditory signals, into computationally efficient spatiotemporal spike patterns. It minimizes the information loss occurring at the analog-to-spike transformation and possesses informational robustness to neural fluctuations and spike losses. The model provides a sparse and efficient coding scheme with precisely controllable spike rate that facilitates training of spiking neural networks in various auditory perception tasks. We further investigate the algorithm-hardware co-designs through a neuromorphic cochlear prototype which demonstrates that our approach can provide a systematic solution for spike-based artificial intelligence by fully exploiting its advantages with spike-based computation.