 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOME: Dual Structure-Semantic Learning with Collaborative MoE for Universal Lesion Detection Across Heterogeneous Ultrasound Datasets
Aug 13, 2025Conventional single-dataset training often fails with new data distributions, especially in ultrasound (US) image analysis due to limited data, acoustic shadows, and speckle noise. Therefore, constructing a universal framework for multi-heterogeneous US datasets is imperative. However, a key challenge arises: how to effectively mitigate inter-dataset interference while preserving dataset-specific discriminative features for robust downstream task? Previous approaches utilize either a single source-specific decoder or a domain adaptation strategy, but these methods experienced a decline in performance when applied to other domains. Considering this, we propose a Universal Collaborative Mixture of Heterogeneous Source-Specific Experts (COME). Specifically, COME establishes dual structure-semantic shared experts that create a universal representation space and then collaborate with source-specific experts to extract discriminative features through providing complementary features. This design enables robust generalization by leveraging cross-datasets experience distributions and providing universal US priors for small-batch or unseen data scenarios. Extensive experiments under three evaluation modes (single-dataset, intra-organ, and inter-organ integration datasets) demonstrate COME's superiority, achieving significant mean AP improvements over state-of-the-art methods. Our project is available at: https://universalcome.github.io/UniversalCOME/.
Robust Multimodal Survival Prediction with the Latent Differentiation Conditional Variational AutoEncoder
Mar 12, 2025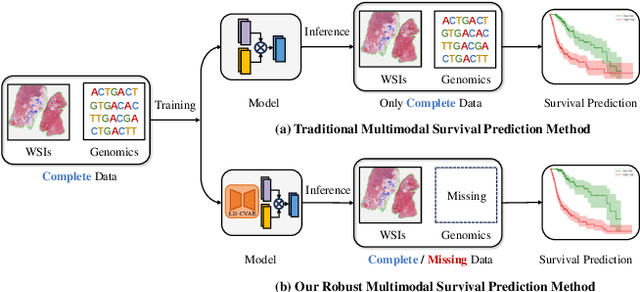

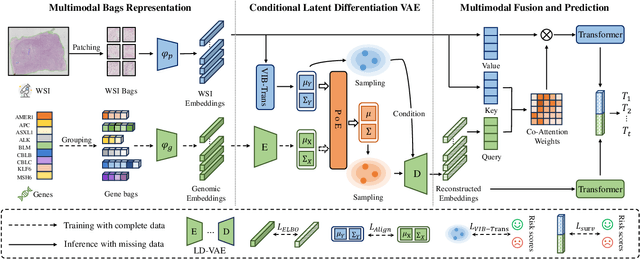

The integrative analysis of histopathological images and genomic data has received increasing attention for survival prediction of human cancers. However, the existing studies always hold the assumption that full modalities are available. As a matter of fact, the cost for collecting genomic data is high, which sometimes makes genomic data unavailable in testing samples. A common way of tackling such incompleteness is to generate the genomic representations from the pathology images. Nevertheless, such strategy still faces the following two challenges: (1) The gigapixel whole slide images (WSIs) are huge and thus hard for representation. (2) It is difficult to generate the genomic embeddings with diverse function categories in a unified generative framework. To address the above challenges, we propose a Conditional Latent Differentiation Variational AutoEncoder (LD-CVAE) for robust multimodal survival prediction, even with missing genomic data. Specifically, a Variational Information Bottleneck Transformer (VIB-Trans) module is proposed to learn compressed pathological representations from the gigapixel WSIs. To generate different functional genomic features, we develop a novel Latent Differentiation Variational AutoEncoder (LD-VAE) to learn the common and specific posteriors for the genomic embeddings with diverse functions. Finally, we use the product-of-experts technique to integrate the genomic common posterior and image posterior for the joint latent distribution estimation in LD-CVAE. We test the effectiveness of our method on five different cancer datasets, and the experimental results demonstrate its superiority in both complete and missing modality scenarios.
Efficient divide-and-conquer registration of UAV and ground LiDAR point clouds through canopy shape context
Jan 27, 2022
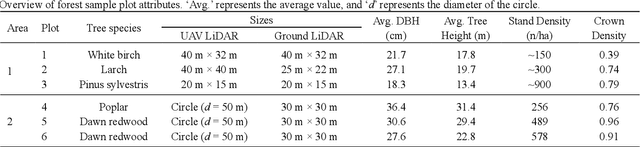
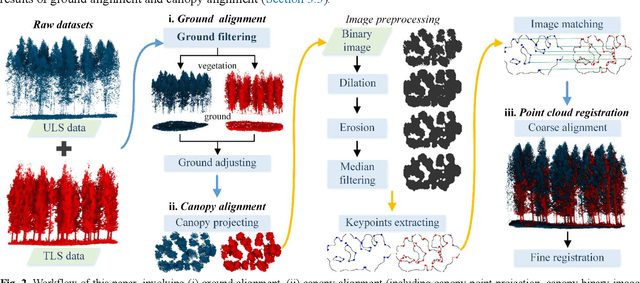
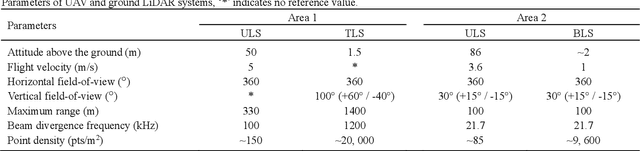
Registration of unmanned aerial vehicle laser scanning (ULS) and ground light detection and ranging (LiDAR) point clouds in forests is critical to create a detailed representation of a forest structure and an accurate inversion of forest parameters. However, forest occlusion poses challenges for marker-based registration methods, and some marker-free automated registration methods have low efficiency due to the process of object (e.g., tree, crown) segmentation. Therefore, we use a divide-and-conquer strategy and propose an automated and efficient method to register ULS and ground LiDAR point clouds in forests. Registration involves coarse alignment and fine registration, where the coarse alignment of point clouds is divided into vertical and horizontal alignment. The vertical alignment is achieved by ground alignment, which is achieved by the transformation relationship between normal vectors of the ground point cloud and the horizontal plane, and the horizontal alignment is achieved by canopy projection image matching. During image matching, vegetation points are first distinguished by the ground filtering algorithm, and then, vegetation points are projected onto the horizontal plane to obtain two binary images. To match the two images, a matching strategy is used based on canopy shape context features, which are described by a two-point congruent set and canopy overlap. Finally, we implement coarse alignment of ULS and ground LiDAR datasets by combining the results of ground alignment and image matching and finish fine registration. Also, the effectiveness, accuracy, and efficiency of the proposed method are demonstrated by field measurements of forest plots. Experimental results show that the ULS and ground LiDAR data in different plots are registered, of which the horizontal alignment errors are less than 0.02 m, and the average runtime of the proposed method is less than 1 second.
Incorporating Orientations into End-to-end Driving Model for Steering Control
Mar 10, 2021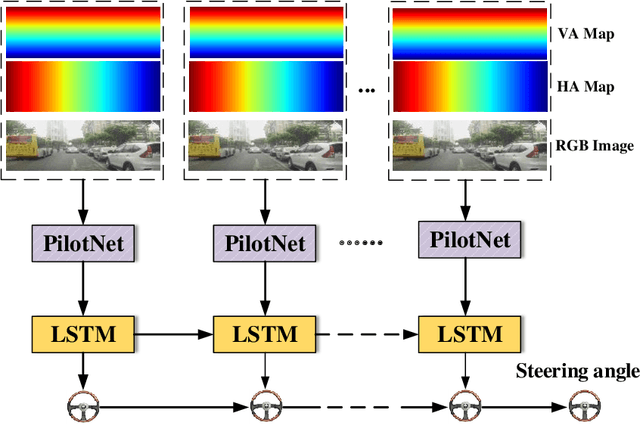

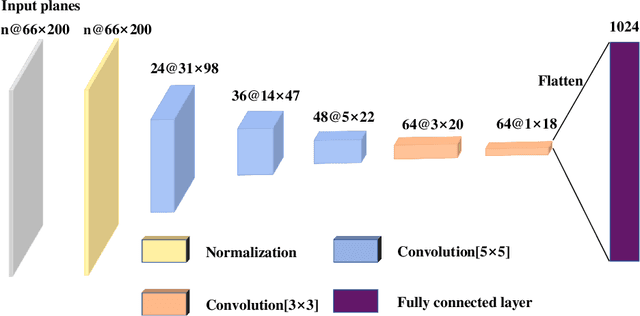

In this paper, we present a novel end-to-end deep neural network model for autonomous driving that takes monocular image sequence as input, and directly generates the steering control angle. Firstly, we model the end-to-end driving problem as a local path planning process. Inspired by the environmental representation in the classical planning algorithms(i.e. the beam curvature method), pixel-wise orientations are fed into the network to learn direction-aware features. Next, to handle the imbalanced distribution of steering values in training datasets, we propose an improvement on a cost-sensitive loss function named SteeringLoss2. Besides, we also present a new end-to-end driving dataset, which provides corresponding LiDAR and image sequences, as well as standard driving behaviors. Our dataset includes multiple driving scenarios, such as urban, country, and off-road. Numerous experiments are conducted on both public available LiVi-Set and our own dataset, and the results show that the model using our proposed methods can predict steering angle accurately.
Transport based Graph Kernels
Nov 02, 2020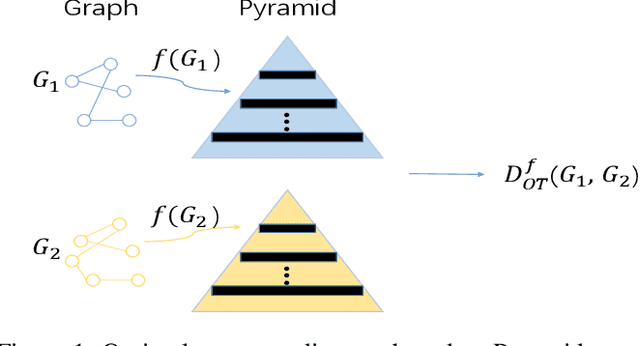
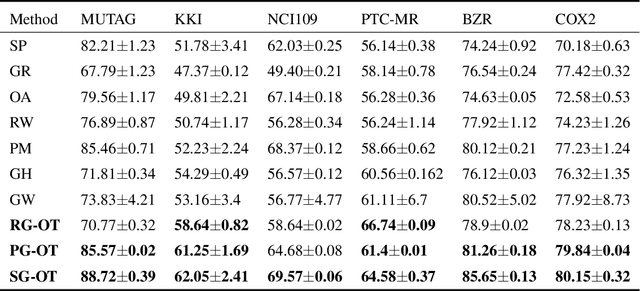

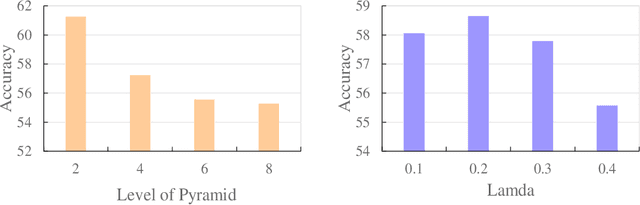
Graph kernel is a powerful tool measuring the similarity between graphs. Most of the existing graph kernels focused on node labels or attributes and ignored graph hierarchical structure information. In order to effectively utilize graph hierarchical structure information, we propose pyramid graph kernel based on optimal transport (OT). Each graph is embedded into hierarchical structures of the pyramid. Then, the OT distance is utilized to measure the similarity between graphs in hierarchical structures. We also utilize the OT distance to measure the similarity between subgraphs and propose subgraph kernel based on OT. The positive semidefinite (p.s.d) of graph kernels based on optimal transport distance is not necessarily possible. We further propose regularized graph kernel based on OT where we add the kernel regularization to the original optimal transport distance to obtain p.s.d kernel matrix. We evaluate the proposed graph kernels on several benchmark classification tasks and compare their performance with the existing state-of-the-art graph kernels. In most cases, our proposed graph kernel algorithms outperform the competing methods.
SEGAN: Structure-Enhanced Generative Adversarial Network for Compressed Sensing MRI Reconstruction
Mar 05, 2019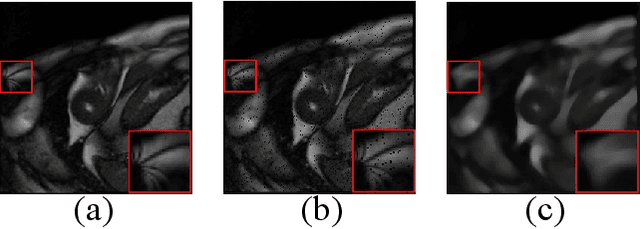
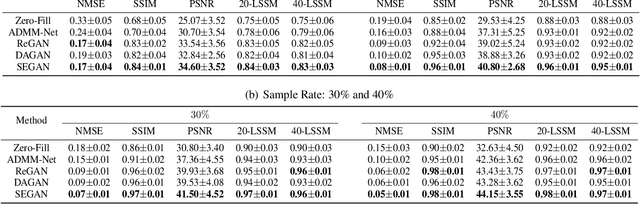


Generative Adversarial Networks (GANs) are powerful tools for reconstructing Compressed Sensing Magnetic Resonance Imaging (CS-MRI). However most recent works lack exploration of structure information of MRI images that is crucial for clinical diagnosis. To tackle this problem, we propose the Structure-Enhanced GAN (SEGAN) that aims at restoring structure information at both local and global scale. SEGAN defines a new structure regularization called Patch Correlation Regularization (PCR) which allows for efficient extraction of structure information. In addition, to further enhance the ability to uncover structure information, we propose a novel generator SU-Net by incorporating multiple-scale convolution filters into each layer. Besides, we theoretically analyze the convergence of stochastic factors contained in training process. Experimental results show that SEGAN is able to learn target structure information and achieves state-of-the-art performance for CS-MRI reconstruction.