 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient divide-and-conquer registration of UAV and ground LiDAR point clouds through canopy shape context
Jan 27, 2022
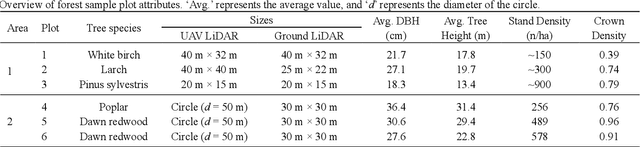
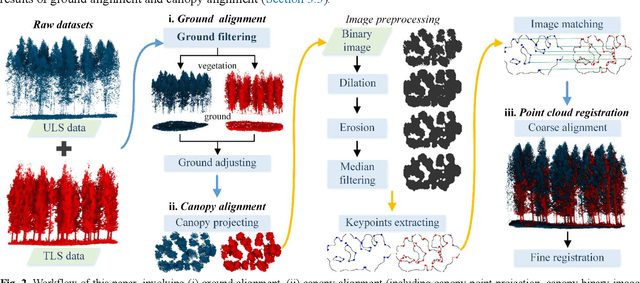
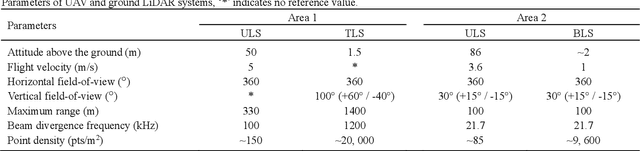
Registration of unmanned aerial vehicle laser scanning (ULS) and ground light detection and ranging (LiDAR) point clouds in forests is critical to create a detailed representation of a forest structure and an accurate inversion of forest parameters. However, forest occlusion poses challenges for marker-based registration methods, and some marker-free automated registration methods have low efficiency due to the process of object (e.g., tree, crown) segmentation. Therefore, we use a divide-and-conquer strategy and propose an automated and efficient method to register ULS and ground LiDAR point clouds in forests. Registration involves coarse alignment and fine registration, where the coarse alignment of point clouds is divided into vertical and horizontal alignment. The vertical alignment is achieved by ground alignment, which is achieved by the transformation relationship between normal vectors of the ground point cloud and the horizontal plane, and the horizontal alignment is achieved by canopy projection image matching. During image matching, vegetation points are first distinguished by the ground filtering algorithm, and then, vegetation points are projected onto the horizontal plane to obtain two binary images. To match the two images, a matching strategy is used based on canopy shape context features, which are described by a two-point congruent set and canopy overlap. Finally, we implement coarse alignment of ULS and ground LiDAR datasets by combining the results of ground alignment and image matching and finish fine registration. Also, the effectiveness, accuracy, and efficiency of the proposed method are demonstrated by field measurements of forest plots. Experimental results show that the ULS and ground LiDAR data in different plots are registered, of which the horizontal alignment errors are less than 0.02 m, and the average runtime of the proposed method is less than 1 second.