 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI Want 'Em All (At Once) -- Ultrametric Cluster Hierarchies
Feb 19, 2025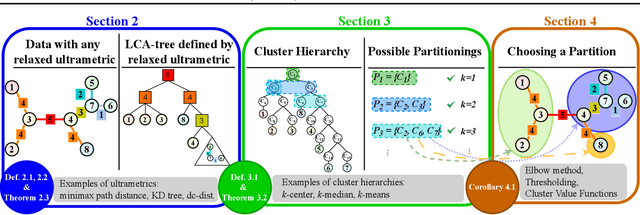
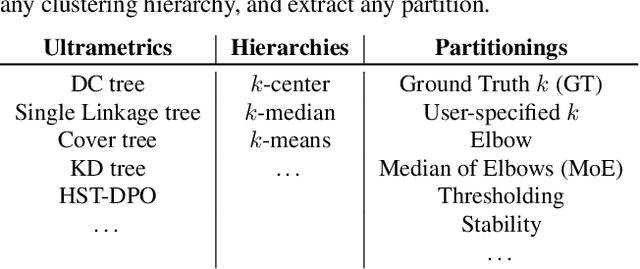
Hierarchical clustering is a powerful tool for exploratory data analysis, organizing data into a tree of clusterings from which a partition can be chosen. This paper generalizes these ideas by proving that, for any reasonable hierarchy, one can optimally solve any center-based clustering objective over it (such as $k$-means). Moreover, these solutions can be found exceedingly quickly and are themselves necessarily hierarchical. Thus, given a cluster tree, we show that one can quickly access a plethora of new, equally meaningful hierarchies. Just as in standard hierarchical clustering, one can then choose any desired partition from these new hierarchies. We conclude by verifying the utility of our proposed techniques across datasets, hierarchies, and partitioning schemes.
SHADE: Deep Density-based Clustering
Oct 08, 2024



Detecting arbitrarily shaped clusters in high-dimensional noisy data is challenging for current clustering methods. We introduce SHADE (Structure-preserving High-dimensional Analysis with Density-based Exploration), the first deep clustering algorithm that incorporates density-connectivity into its loss function. Similar to existing deep clustering algorithms, SHADE supports high-dimensional and large data sets with the expressive power of a deep autoencoder. In contrast to most existing deep clustering methods that rely on a centroid-based clustering objective, SHADE incorporates a novel loss function that captures density-connectivity. SHADE thereby learns a representation that enhances the separation of density-connected clusters. SHADE detects a stable clustering and noise points fully automatically without any user input. It outperforms existing methods in clustering quality, especially on data that contain non-Gaussian clusters, such as video data. Moreover, the embedded space of SHADE is suitable for visualization and interpretation of the clustering results as the individual shapes of the clusters are preserved.
Discovering Individual Rewards in Collective Behavior through Inverse Multi-Agent Reinforcement Learning
May 17, 2023The discovery of individual objectives in collective behavior of complex dynamical systems such as fish schools and bacteria colonies is a long-standing challenge. Inverse reinforcement learning is a potent approach for addressing this challenge but its applicability to dynamical systems, involving continuous state-action spaces and multiple interacting agents, has been limited. In this study, we tackle this challenge by introducing an off-policy inverse multi-agent reinforcement learning algorithm (IMARL). Our approach combines the ReF-ER techniques with guided cost learning. By leveraging demonstrations, our algorithm automatically uncovers the reward function and learns an effective policy for the agents. Through extensive experimentation, we demonstrate that the proposed policy captures the behavior observed in the provided data, and achieves promising results across problem domains including single agent models in the OpenAI gym and multi-agent models of schooling behavior. The present study shows that the proposed IMARL algorithm is a significant step towards understanding collective dynamics from the perspective of its constituents, and showcases its value as a tool for studying complex physical systems exhibiting collective behaviour.
Deep Clustering With Consensus Representations
Oct 13, 2022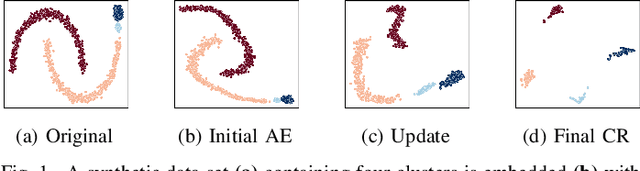
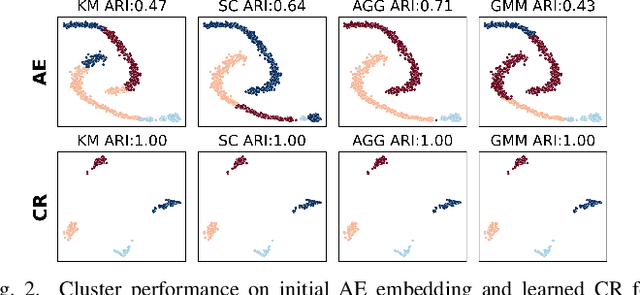
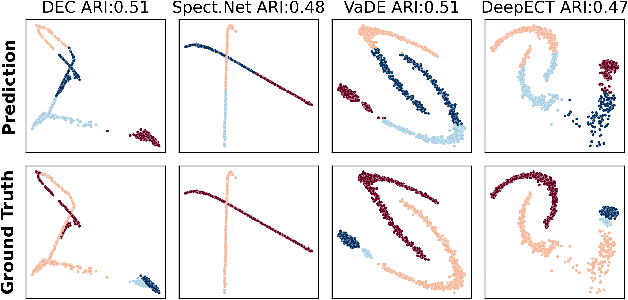
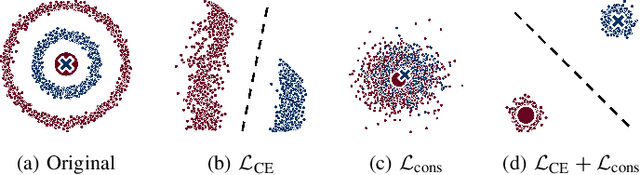
The field of deep clustering combines deep learning and clustering to learn representations that improve both the learned representation and the performance of the considered clustering method. Most existing deep clustering methods are designed for a single clustering method, e.g., k-means, spectral clustering, or Gaussian mixture models, but it is well known that no clustering algorithm works best in all circumstances. Consensus clustering tries to alleviate the individual weaknesses of clustering algorithms by building a consensus between members of a clustering ensemble. Currently, there is no deep clustering method that can include multiple heterogeneous clustering algorithms in an ensemble to update representations and clusterings together. To close this gap, we introduce the idea of a consensus representation that maximizes the agreement between ensemble members. Further, we propose DECCS (Deep Embedded Clustering with Consensus representationS), a deep consensus clustering method that learns a consensus representation by enhancing the embedded space to such a degree that all ensemble members agree on a common clustering result. Our contributions are the following: (1) We introduce the idea of learning consensus representations for heterogeneous clusterings, a novel notion to approach consensus clustering. (2) We propose DECCS, the first deep clustering method that jointly improves the representation and clustering results of multiple heterogeneous clustering algorithms. (3) We show in experiments that learning a consensus representation with DECCS is outperforming several relevant baselines from deep clustering and consensus clustering. Our code can be found at https://gitlab.cs.univie.ac.at/lukas/deccs
Remember and Forget Experience Replay for Multi-Agent Reinforcement Learning
Mar 24, 2022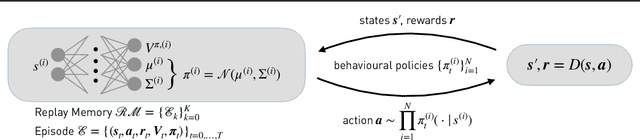

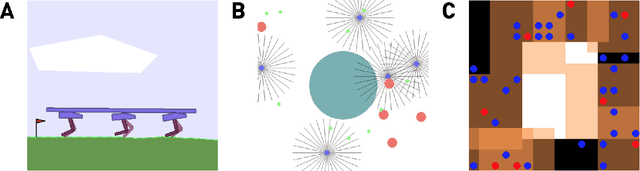
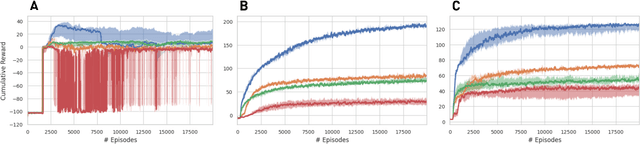
We present the extension of the Remember and Forget for Experience Replay (ReF-ER) algorithm to Multi-Agent Reinforcement Learning (MARL). {ReF-ER} was shown to outperform state of the art algorithms for continuous control in problems ranging from the OpenAI Gym to complex fluid flows. In MARL, the dependencies between the agents are included in the state-value estimator and the environment dynamics are modeled via the importance weights used by ReF-ER. In collaborative environments, we find the best performance when the value is estimated using individual rewards and we ignore the effects of other actions on the transition map. We benchmark the performance of ReF-ER MARL on the Stanford Intelligent Systems Laboratory (SISL) environments. We find that employing a single feed-forward neural network for the policy and the value function in ReF-ER MARL, outperforms state of the art algorithms that rely on complex neural network architectures.
Learning swimming escape patterns under energy constraints
May 03, 2021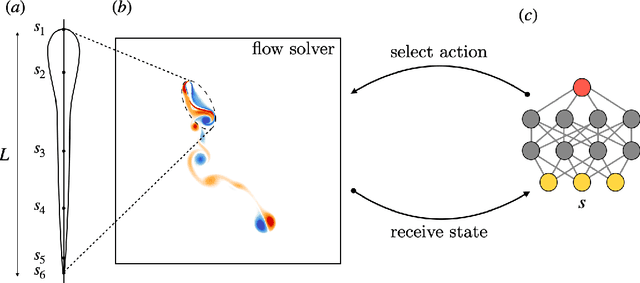
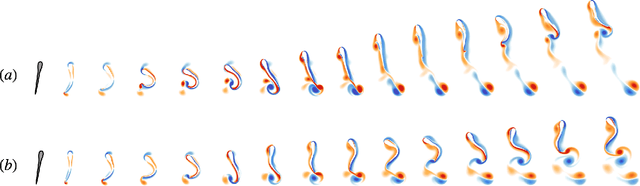
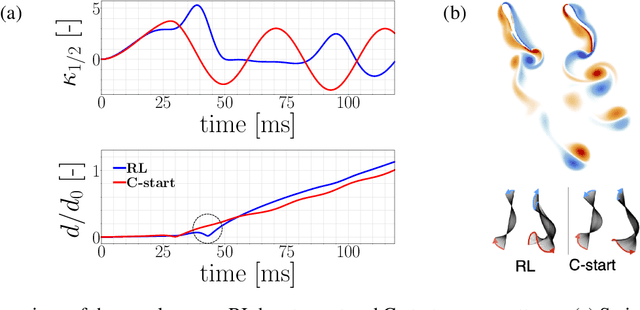

Swimming organisms can escape their predators by creating and harnessing unsteady flow fields through their body motions. Stochastic optimization and flow simulations have identified escape patterns that are consistent with those observed in natural larval swimmers. However, these patterns have been limited by the specification of a particular cost function and depend on a prescribed functional form of the body motion. Here, we deploy reinforcement learning to discover swimmer escape patterns under energy constraints. The identified patterns include the C-start mechanism, in addition to more energetically efficient escapes. We find that maximizing distance with limited energy requires swimming via short bursts of accelerating motion interlinked with phases of gliding. The present, data efficient, reinforcement learning algorithm results in an array of patterns that reveal practical flow optimization principles for efficient swimming and the methodology can be transferred to the control of aquatic robotic devices operating under energy constraints.