 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion Based Robust LiDAR Place Recognition
Apr 16, 2025Mobile robots on construction sites require accurate pose estimation to perform autonomous surveying and inspection missions. Localization in construction sites is a particularly challenging problem due to the presence of repetitive features such as flat plastered walls and perceptual aliasing due to apartments with similar layouts inter and intra floors. In this paper, we focus on the global re-positioning of a robot with respect to an accurate scanned mesh of the building solely using LiDAR data. In our approach, a neural network is trained on synthetic LiDAR point clouds generated by simulating a LiDAR in an accurate real-life large-scale mesh. We train a diffusion model with a PointNet++ backbone, which allows us to model multiple position candidates from a single LiDAR point cloud. The resulting model can successfully predict the global position of LiDAR in confined and complex sites despite the adverse effects of perceptual aliasing. The learned distribution of potential global positions can provide multi-modal position distribution. We evaluate our approach across five real-world datasets and show the place recognition accuracy of 77% +/-2m on average while outperforming baselines at a factor of 2 in mean error.
SceneGraphLoc: Cross-Modal Coarse Visual Localization on 3D Scene Graphs
Mar 30, 2024We introduce a novel problem, i.e., the localization of an input image within a multi-modal reference map represented by a database of 3D scene graphs. These graphs comprise multiple modalities, including object-level point clouds, images, attributes, and relationships between objects, offering a lightweight and efficient alternative to conventional methods that rely on extensive image databases. Given the available modalities, the proposed method SceneGraphLoc learns a fixed-sized embedding for each node (i.e., representing an object instance) in the scene graph, enabling effective matching with the objects visible in the input query image. This strategy significantly outperforms other cross-modal methods, even without incorporating images into the map embeddings. When images are leveraged, SceneGraphLoc achieves performance close to that of state-of-the-art techniques depending on large image databases, while requiring three orders-of-magnitude less storage and operating orders-of-magnitude faster. The code will be made public.
OverlapNet: Loop Closing for LiDAR-based SLAM
May 24, 2021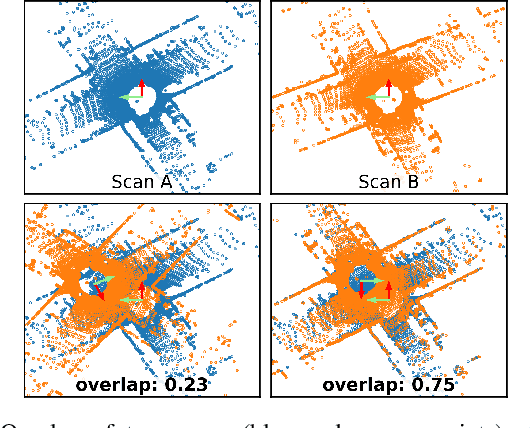
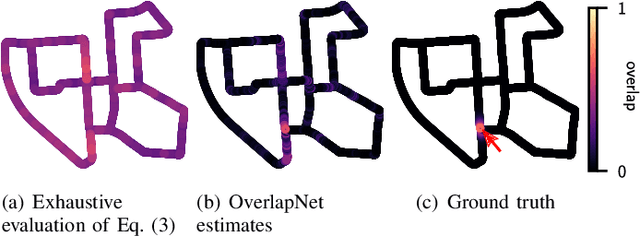

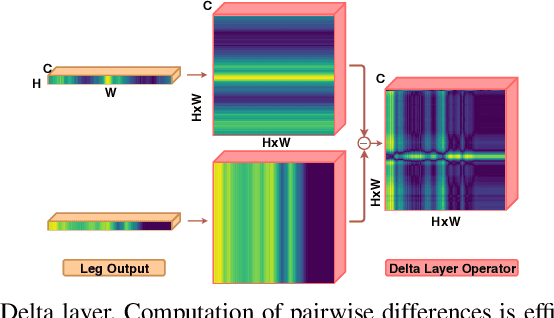
Simultaneous localization and mapping (SLAM) is a fundamental capability required by most autonomous systems. In this paper, we address the problem of loop closing for SLAM based on 3D laser scans recorded by autonomous cars. Our approach utilizes a deep neural network exploiting different cues generated from LiDAR data for finding loop closures. It estimates an image overlap generalized to range images and provides a relative yaw angle estimate between pairs of scans. Based on such predictions, we tackle loop closure detection and integrate our approach into an existing SLAM system to improve its mapping results. We evaluate our approach on sequences of the KITTI odometry benchmark and the Ford campus dataset. We show that our method can effectively detect loop closures surpassing the detection performance of state-of-the-art methods. To highlight the generalization capabilities of our approach, we evaluate our model on the Ford campus dataset while using only KITTI for training. The experiments show that the learned representation is able to provide reliable loop closure candidates, also in unseen environments.
Adaptive Robust Kernels for Non-Linear Least Squares Problems
May 27, 2020
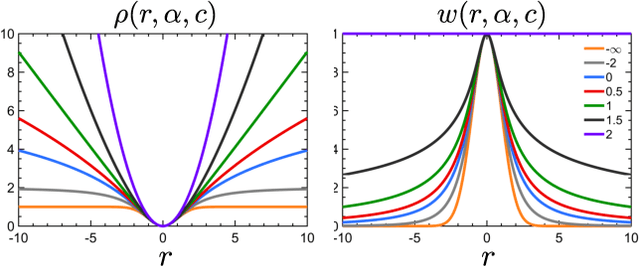
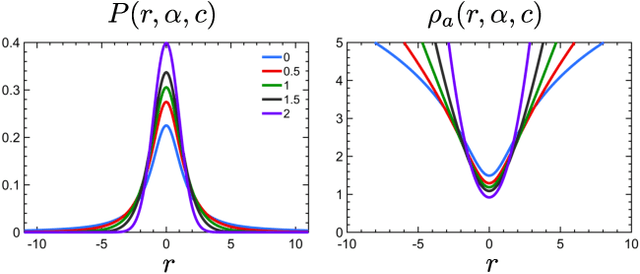

State estimation is a key ingredient in most robotic systems. Often, state estimation is performed using some form of least squares minimization. Basically, all error minimization procedures that work on real-world data use robust kernels as the standard way for dealing with outliers in the data. These kernels, however, are often hand-picked, sometimes in different combinations, and their parameters need to be tuned manually for a particular problem. In this paper, we propose the use of a generalized robust kernel family, which is automatically tuned based on the distribution of the residuals and includes the common m-estimators. We tested our adaptive kernel with two popular estimation problems in robotics, namely ICP and bundle adjustment. The experiments presented in this paper suggest that our approach provides higher robustness while avoiding a manual tuning of the kernel parameters.