 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpotlight-based 3D Instrument Guidance for Retinal Surgery
Dec 11, 2020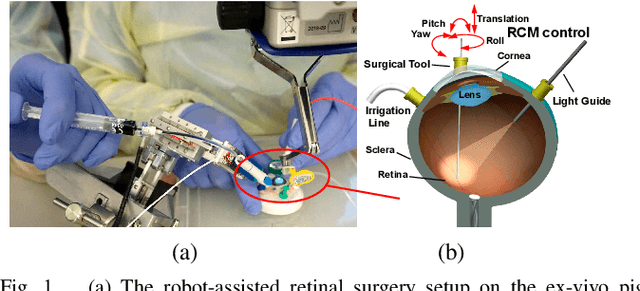
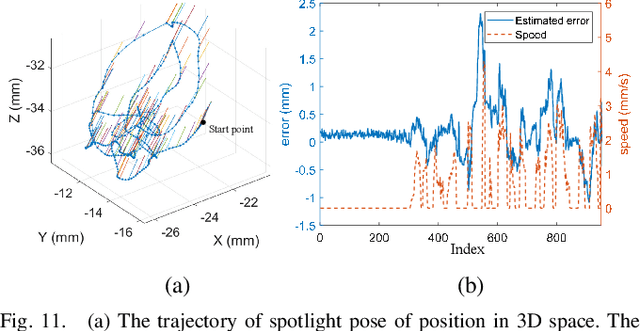
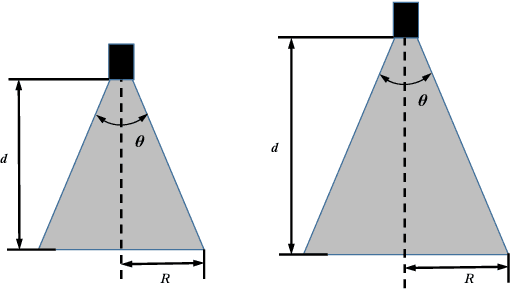
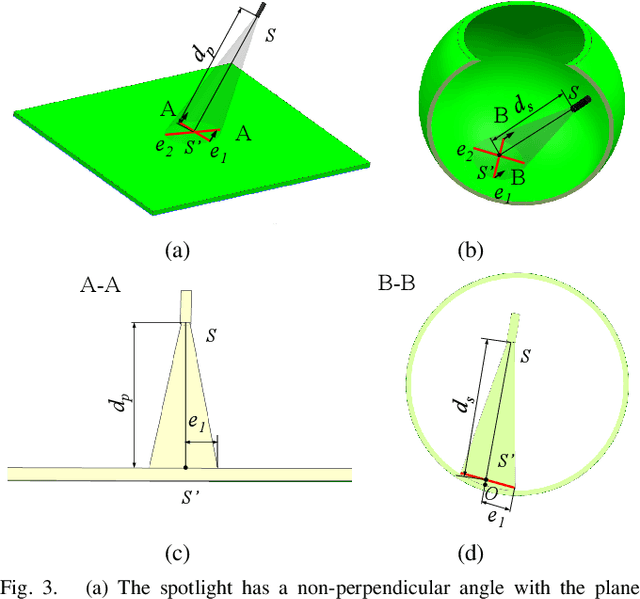
Retinal surgery is a complex activity that can be challenging for a surgeon to perform effectively and safely. Image guided robot-assisted surgery is one of the promising solutions that bring significant surgical enhancement in treatment outcome and reduce the physical limitations of human surgeons. In this paper, we demonstrate a novel method for 3D guidance of the instrument based on the projection of spotlight in the single microscope images. The spotlight projection mechanism is firstly analyzed and modeled with a projection on both a plane and a sphere surface. To test the feasibility of the proposed method, a light fiber is integrated into the instrument which is driven by the Steady-Hand Eye Robot (SHER). The spot of light is segmented and tracked on a phantom retina using the proposed algorithm. The static calibration and dynamic test results both show that the proposed method can easily archive 0.5 mm of tip-to-surface distance which is within the clinically acceptable accuracy for intraocular visual guidance.
Hybrid Robotic-assisted Frameworks for Endomicroscopy Scanning in Retinal Surgeries
Sep 15, 2019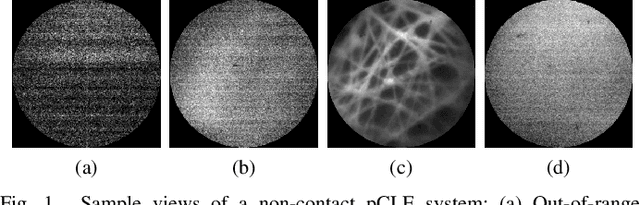

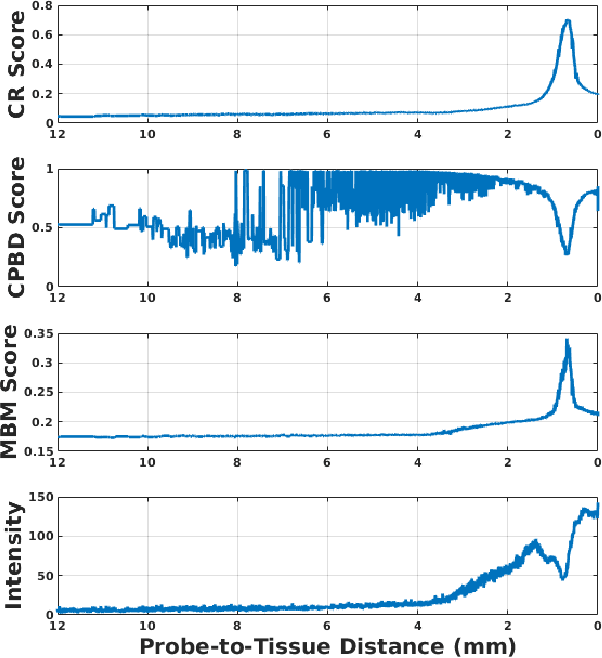
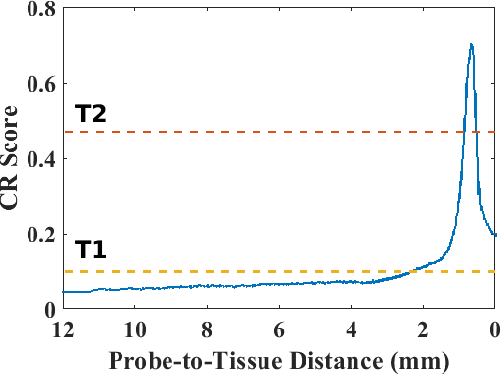
High-resolution real-time imaging at cellular levelin retinal surgeries is very challenging due to extremely confinedspace within the eyeball and lack of appropriate modalities.Probe-based confocal laser endomicroscopy (pCLE) system,which has a small footprint and provides highly-magnified im-ages, can be a potential imaging modality for improved diagnosis.The ability to visualize in cellular-level the retinal pigmentepithelium and the chorodial blood vessels underneath canprovide useful information for surgical outcomes in conditionssuch as retinal detachment. However, the adoption of pCLE islimited due to narrow field of view and micron-level range offocus. The physiological tremor of surgeons' hand also deterioratethe image quality considerably and leads to poor imaging results. In this paper, a novel image-based hybrid motion controlapproach is proposed to mitigate challenges of using pCLEin retinal surgeries. The proposed framework enables sharedcontrol of the pCLE probe by a surgeon to scan the tissueprecisely without hand tremors and an auto-focus image-basedcontrol algorithm that optimizes quality of pCLE images. Thecontrol strategy is deployed on two semi-autonomous frameworks: cooperative and teleoperated. Both frameworks consist of theSteady-Hand Eye Robot (SHER), whose end-effector holds thepCLE probe...
Sclera Force Control in Robot-assisted Eye Surgery: Adaptive Force Control vs. Auditory Feedback
Jan 10, 2019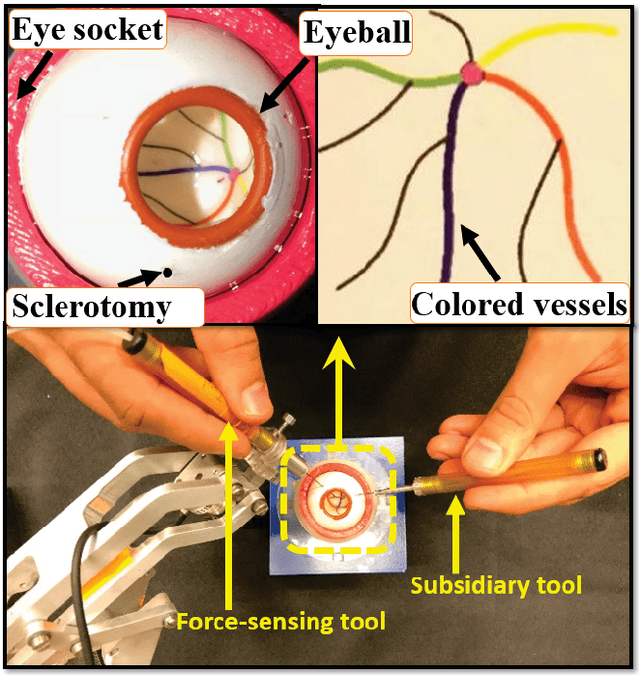
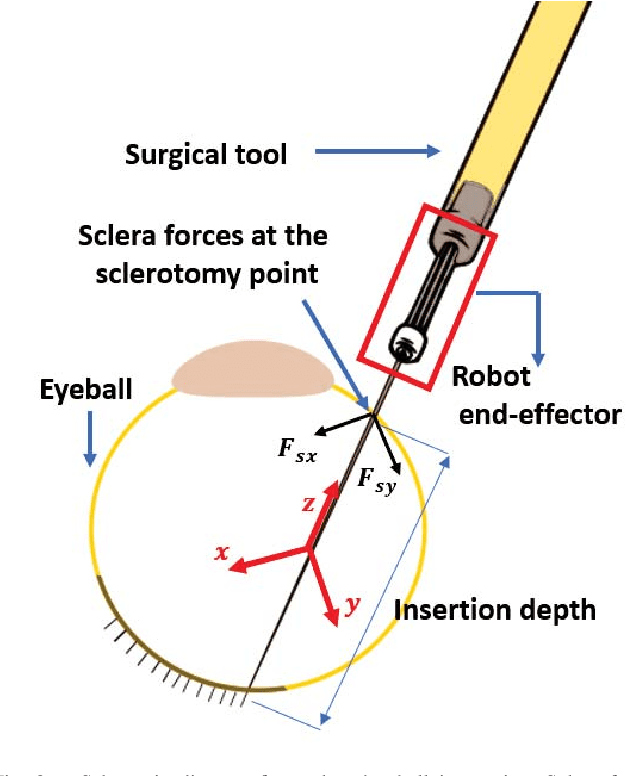
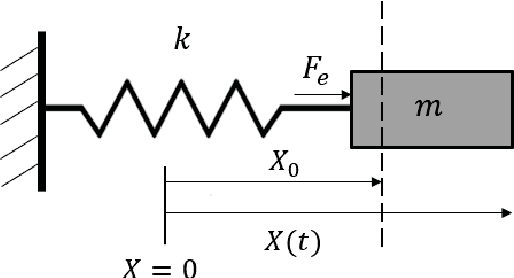
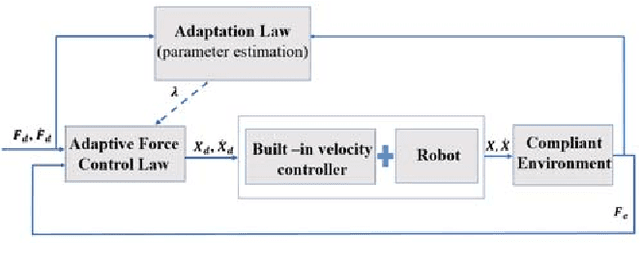
Surgeon hand tremor limits human capability during microsurgical procedures such as those that treat the eye. In contrast, elimination of hand tremor through the introduction of microsurgical robots diminishes the surgeon's tactile perception of useful and familiar tool-to-sclera forces. While the large mass and inertia of eye surgical robot prevents surgeon microtremor, loss of perception of small scleral forces may put the sclera at risk of injury. In this paper, we have applied and compared two different methods to assure the safety of sclera tissue during robot-assisted eye surgery. In the active control method, an adaptive force control strategy is implemented on the Steady-Hand Eye Robot in order to control the magnitude of scleral forces when they exceed safe boundaries. This autonomous force compensation is then compared to a passive force control method in which the surgeon performs manual adjustments in response to the provided audio feedback proportional to the magnitude of sclera force. A pilot study with three users indicate that the active control method is potentially more efficient.