 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Impact of Machine Learning on 2D/3D Registration for Image-guided Interventions: A Systematic Review and Perspective
Aug 04, 2021
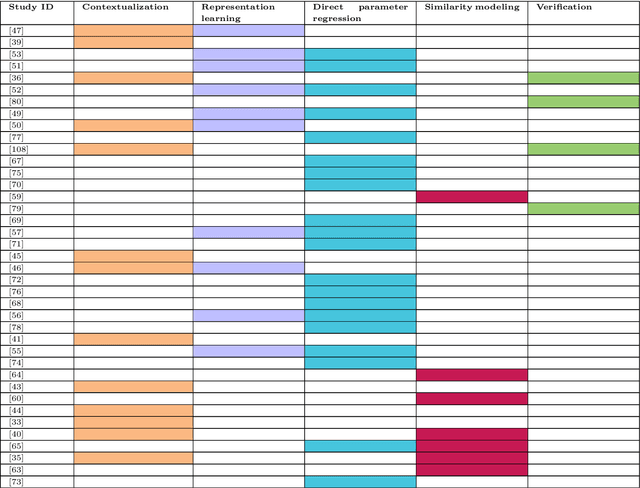

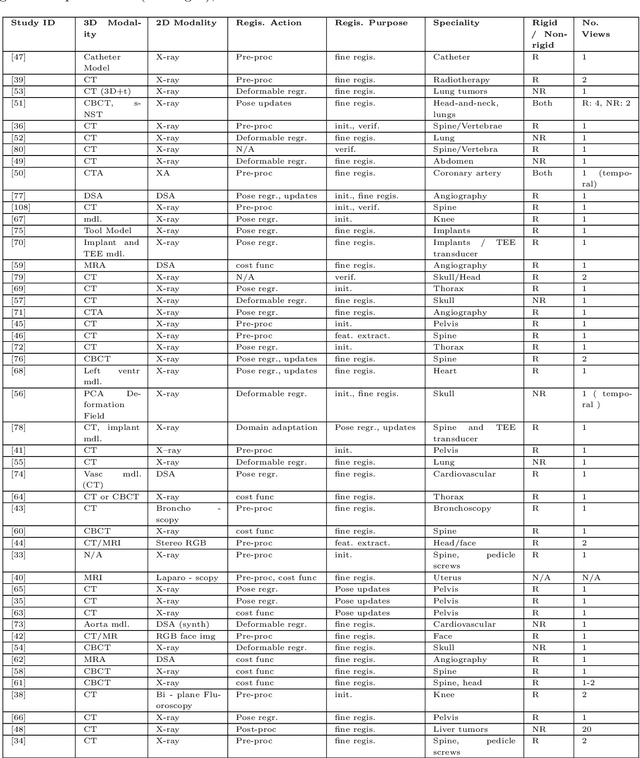
Image-based navigation is widely considered the next frontier of minimally invasive surgery. It is believed that image-based navigation will increase the access to reproducible, safe, and high-precision surgery as it may then be performed at acceptable costs and effort. This is because image-based techniques avoid the need of specialized equipment and seamlessly integrate with contemporary workflows. Further, it is expected that image-based navigation will play a major role in enabling mixed reality environments and autonomous, robotic workflows. A critical component of image guidance is 2D/3D registration, a technique to estimate the spatial relationships between 3D structures, e.g., volumetric imagery or tool models, and 2D images thereof, such as fluoroscopy or endoscopy. While image-based 2D/3D registration is a mature technique, its transition from the bench to the bedside has been restrained by well-known challenges, including brittleness of the optimization objective, hyperparameter selection, and initialization, difficulties around inconsistencies or multiple objects, and limited single-view performance. One reason these challenges persist today is that analytical solutions are likely inadequate considering the complexity, variability, and high-dimensionality of generic 2D/3D registration problems. The recent advent of machine learning-based approaches to imaging problems that, rather than specifying the desired functional mapping, approximate it using highly expressive parametric models holds promise for solving some of the notorious challenges in 2D/3D registration. In this manuscript, we review the impact of machine learning on 2D/3D registration to systematically summarize the recent advances made by introduction of this novel technology. Grounded in these insights, we then offer our perspective on the most pressing needs, significant open problems, and possible next steps.
Spotlight-based 3D Instrument Guidance for Retinal Surgery
Dec 11, 2020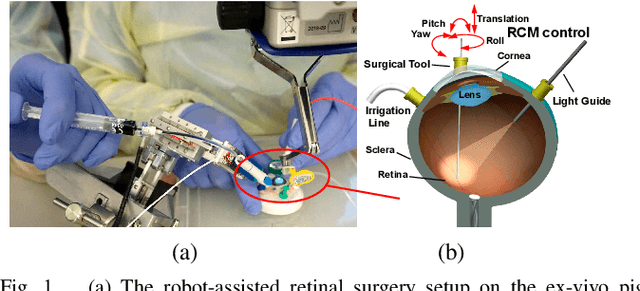
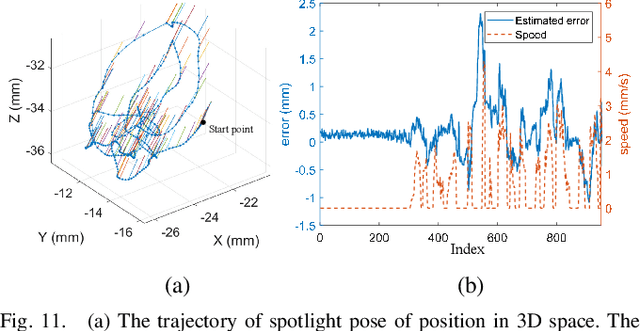
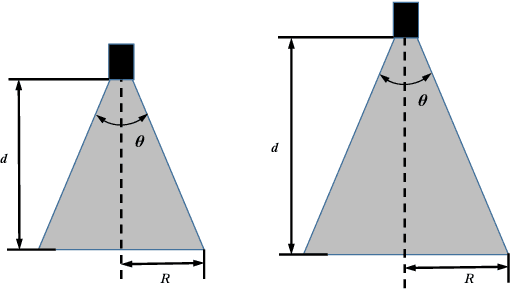
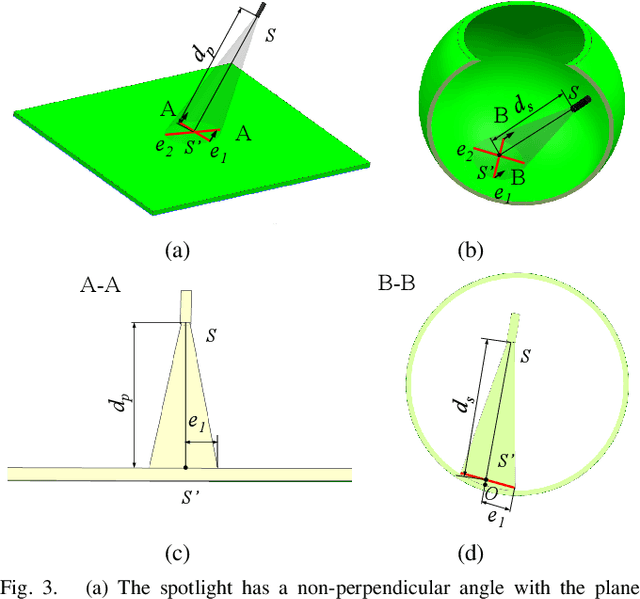
Retinal surgery is a complex activity that can be challenging for a surgeon to perform effectively and safely. Image guided robot-assisted surgery is one of the promising solutions that bring significant surgical enhancement in treatment outcome and reduce the physical limitations of human surgeons. In this paper, we demonstrate a novel method for 3D guidance of the instrument based on the projection of spotlight in the single microscope images. The spotlight projection mechanism is firstly analyzed and modeled with a projection on both a plane and a sphere surface. To test the feasibility of the proposed method, a light fiber is integrated into the instrument which is driven by the Steady-Hand Eye Robot (SHER). The spot of light is segmented and tracked on a phantom retina using the proposed algorithm. The static calibration and dynamic test results both show that the proposed method can easily archive 0.5 mm of tip-to-surface distance which is within the clinically acceptable accuracy for intraocular visual guidance.