 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMedVQA-TREE: A Multimodal Reasoning and Retrieval Framework for Sarcopenia Prediction
Aug 26, 2025



Accurate sarcopenia diagnosis via ultrasound remains challenging due to subtle imaging cues, limited labeled data, and the absence of clinical context in most models. We propose MedVQA-TREE, a multimodal framework that integrates a hierarchical image interpretation module, a gated feature-level fusion mechanism, and a novel multi-hop, multi-query retrieval strategy. The vision module includes anatomical classification, region segmentation, and graph-based spatial reasoning to capture coarse, mid-level, and fine-grained structures. A gated fusion mechanism selectively integrates visual features with textual queries, while clinical knowledge is retrieved through a UMLS-guided pipeline accessing PubMed and a sarcopenia-specific external knowledge base. MedVQA-TREE was trained and evaluated on two public MedVQA datasets (VQA-RAD and PathVQA) and a custom sarcopenia ultrasound dataset. The model achieved up to 99% diagnostic accuracy and outperformed previous state-of-the-art methods by over 10%. These results underscore the benefit of combining structured visual understanding with guided knowledge retrieval for effective AI-assisted diagnosis in sarcopenia.
Pulmonologists-Level lung cancer detection based on standard blood test results and smoking status using an explainable machine learning approach
Feb 14, 2024



Lung cancer (LC) remains the primary cause of cancer-related mortality, largely due to late-stage diagnoses. Effective strategies for early detection are therefore of paramount importance. In recent years, machine learning (ML) has demonstrated considerable potential in healthcare by facilitating the detection of various diseases. In this retrospective development and validation study, we developed an ML model based on dynamic ensemble selection (DES) for LC detection. The model leverages standard blood sample analysis and smoking history data from a large population at risk in Denmark. The study includes all patients examined on suspicion of LC in the Region of Southern Denmark from 2009 to 2018. We validated and compared the predictions by the DES model with diagnoses provided by five pulmonologists. Among the 38,944 patients, 9,940 had complete data of which 2,505 (25\%) had LC. The DES model achieved an area under the roc curve of 0.77$\pm$0.01, sensitivity of 76.2\%$\pm$2.4\%, specificity of 63.8\%$\pm$2.3\%, positive predictive value of 41.6\%$\pm$1.2\%, and F\textsubscript{1}-score of 53.8\%$\pm$1.1\%. The DES model outperformed all five pulmonologists, achieving a sensitivity 9\% higher than their average. The model identified smoking status, age, total calcium levels, neutrophil count, and lactate dehydrogenase as the most important factors for the detection of LC. The results highlight the successful application of the ML approach in detecting LC, surpassing pulmonologists' performance. Incorporating clinical and laboratory data in future risk assessment models can improve decision-making and facilitate timely referrals.
NLP-IIS@UT at SemEval-2021 Task 4: Machine Reading Comprehension using the Long Document Transformer
May 08, 2021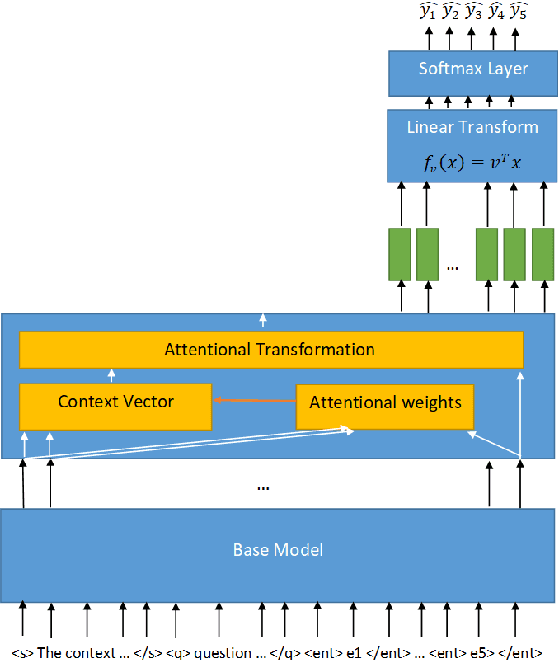
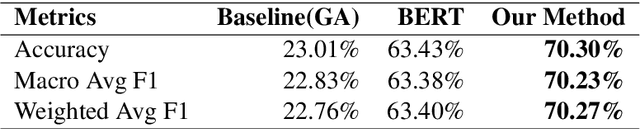
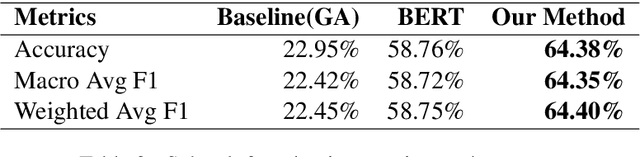
This paper presents a technical report of our submission to the 4th task of SemEval-2021, titled: Reading Comprehension of Abstract Meaning. In this task, we want to predict the correct answer based on a question given a context. Usually, contexts are very lengthy and require a large receptive field from the model. Thus, common contextualized language models like BERT miss fine representation and performance due to the limited capacity of the input tokens. To tackle this problem, we used the Longformer model to better process the sequences. Furthermore, we utilized the method proposed in the Longformer benchmark on Wikihop dataset which improved the accuracy on our task data from 23.01% and 22.95% achieved by the baselines for subtask 1 and 2, respectively, to 70.30% and 64.38%.
Spotlight-based 3D Instrument Guidance for Retinal Surgery
Dec 11, 2020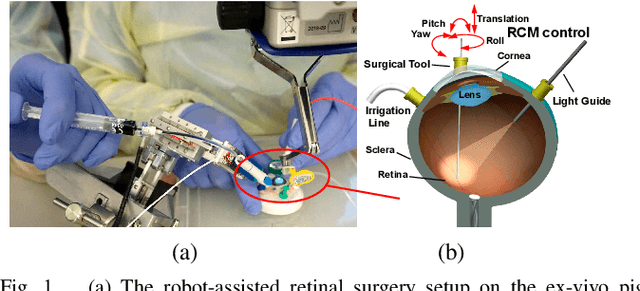
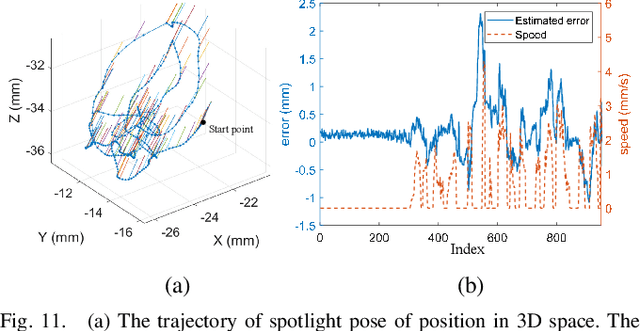
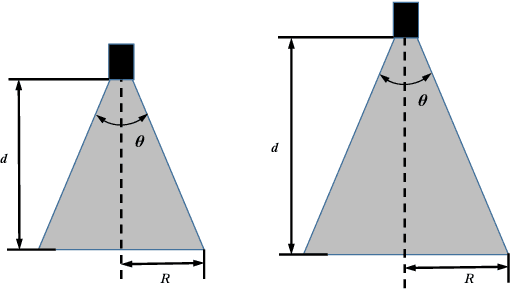
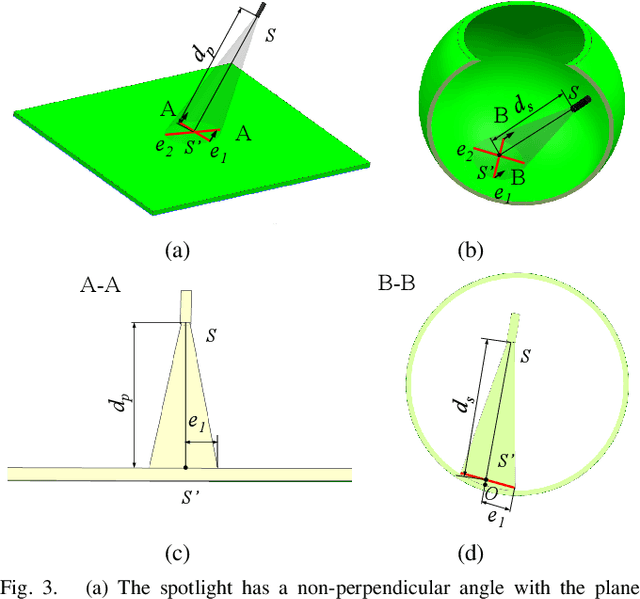
Retinal surgery is a complex activity that can be challenging for a surgeon to perform effectively and safely. Image guided robot-assisted surgery is one of the promising solutions that bring significant surgical enhancement in treatment outcome and reduce the physical limitations of human surgeons. In this paper, we demonstrate a novel method for 3D guidance of the instrument based on the projection of spotlight in the single microscope images. The spotlight projection mechanism is firstly analyzed and modeled with a projection on both a plane and a sphere surface. To test the feasibility of the proposed method, a light fiber is integrated into the instrument which is driven by the Steady-Hand Eye Robot (SHER). The spot of light is segmented and tracked on a phantom retina using the proposed algorithm. The static calibration and dynamic test results both show that the proposed method can easily archive 0.5 mm of tip-to-surface distance which is within the clinically acceptable accuracy for intraocular visual guidance.
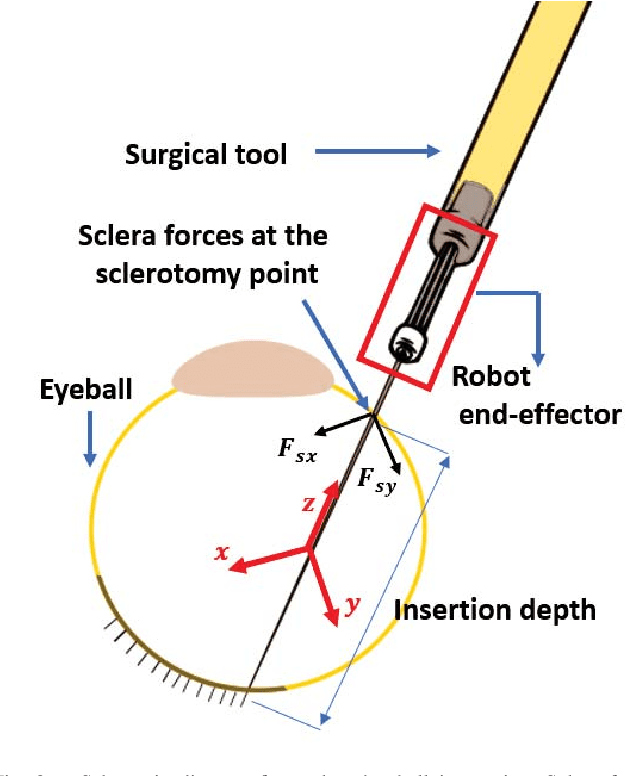
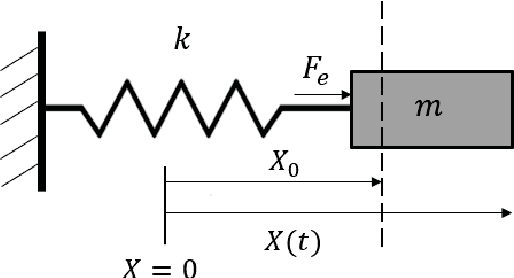
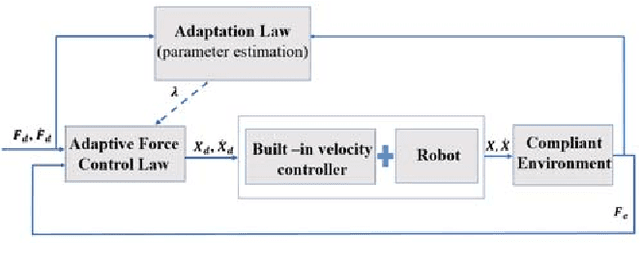
Sclera Force Control in Robot-assisted Eye Surgery: Adaptive Force Control vs. Auditory Feedback
Jan 10, 2019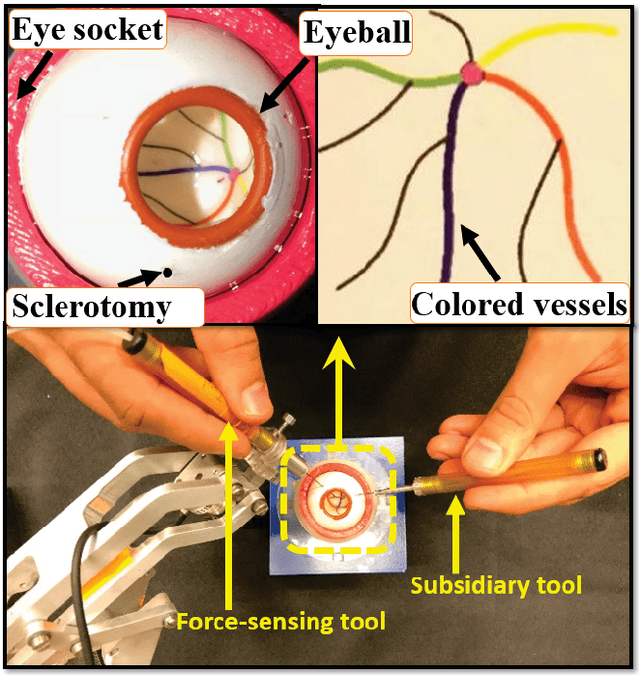
Surgeon hand tremor limits human capability during microsurgical procedures such as those that treat the eye. In contrast, elimination of hand tremor through the introduction of microsurgical robots diminishes the surgeon's tactile perception of useful and familiar tool-to-sclera forces. While the large mass and inertia of eye surgical robot prevents surgeon microtremor, loss of perception of small scleral forces may put the sclera at risk of injury. In this paper, we have applied and compared two different methods to assure the safety of sclera tissue during robot-assisted eye surgery. In the active control method, an adaptive force control strategy is implemented on the Steady-Hand Eye Robot in order to control the magnitude of scleral forces when they exceed safe boundaries. This autonomous force compensation is then compared to a passive force control method in which the surgeon performs manual adjustments in response to the provided audio feedback proportional to the magnitude of sclera force. A pilot study with three users indicate that the active control method is potentially more efficient.