 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVibro-Sense: Robust Vibration-based Impulse Response Localization and Trajectory Tracking for Robotic Hands
Jan 28, 2026Rich contact perception is crucial for robotic manipulation, yet traditional tactile skins remain expensive and complex to integrate. This paper presents a scalable alternative: high-accuracy whole-body touch localization via vibro-acoustic sensing. By equipping a robotic hand with seven low-cost piezoelectric microphones and leveraging an Audio Spectrogram Transformer, we decode the vibrational signatures generated during physical interaction. Extensive evaluation across stationary and dynamic tasks reveals a localization error of under 5 mm in static conditions. Furthermore, our analysis highlights the distinct influence of material properties: stiff materials (e.g., metal) excel in impulse response localization due to sharp, high-bandwidth responses, whereas textured materials (e.g., wood) provide superior friction-based features for trajectory tracking. The system demonstrates robustness to the robot's own motion, maintaining effective tracking even during active operation. Our primary contribution is demonstrating that complex physical contact dynamics can be effectively decoded from simple vibrational signals, offering a viable pathway to widespread, affordable contact perception in robotics. To accelerate research, we provide our full datasets, models, and experimental setups as open-source resources.
Do Robots Really Need Anthropomorphic Hands?
Aug 07, 2025



Human manipulation skills represent a pinnacle of their voluntary motor functions, requiring the coordination of many degrees of freedom and processing of high-dimensional sensor input to achieve such a high level of dexterity. Thus, we set out to answer whether the human hand, with its associated biomechanical properties, sensors, and control mechanisms, is an ideal that we should strive for in robotics-do we really need anthropomorphic robotic hands? This survey can help practitioners to make the trade-off between hand complexity and potential manipulation skills. We provide an overview of the human hand, a comparison of commercially available robotic and prosthetic hands, and a systematic review of hand mechanisms and skills that they are capable of. This leads to follow-up questions. What is the minimum requirement for mechanisms and sensors to implement most skills that a robot needs? What is missing to reach human-level dexterity? Can we improve upon human dexterity? Although complex five-fingered hands are often used as the ultimate goal for robotic manipulators, they are not necessary for all tasks. We found that wrist flexibility and finger abduction/adduction are important for manipulation capabilities. On the contrary, increasing the number of fingers, actuators, or degrees of freedom is often not necessary. Three fingers are a good compromise between simplicity and dexterity. Non-anthropomorphic hand designs with two opposing pairs of fingers or human hands with six fingers can further increase dexterity, suggesting that the human hand may not be the optimum.
Advances in Compliance Detection: Novel Models Using Vision-Based Tactile Sensors
Jun 17, 2025Compliance is a critical parameter for describing objects in engineering, agriculture, and biomedical applications. Traditional compliance detection methods are limited by their lack of portability and scalability, rely on specialized, often expensive equipment, and are unsuitable for robotic applications. Moreover, existing neural network-based approaches using vision-based tactile sensors still suffer from insufficient prediction accuracy. In this paper, we propose two models based on Long-term Recurrent Convolutional Networks (LRCNs) and Transformer architectures that leverage RGB tactile images and other information captured by the vision-based sensor GelSight to predict compliance metrics accurately. We validate the performance of these models using multiple metrics and demonstrate their effectiveness in accurately estimating compliance. The proposed models exhibit significant performance improvement over the baseline. Additionally, we investigated the correlation between sensor compliance and object compliance estimation, which revealed that objects that are harder than the sensor are more challenging to estimate.
Safe Continual Domain Adaptation after Sim2Real Transfer of Reinforcement Learning Policies in Robotics
Mar 13, 2025Domain randomization has emerged as a fundamental technique in reinforcement learning (RL) to facilitate the transfer of policies from simulation to real-world robotic applications. Many existing domain randomization approaches have been proposed to improve robustness and sim2real transfer. These approaches rely on wide randomization ranges to compensate for the unknown actual system parameters, leading to robust but inefficient real-world policies. In addition, the policies pretrained in the domain-randomized simulation are fixed after deployment due to the inherent instability of the optimization processes based on RL and the necessity of sampling exploitative but potentially unsafe actions on the real system. This limits the adaptability of the deployed policy to the inevitably changing system parameters or environment dynamics over time. We leverage safe RL and continual learning under domain-randomized simulation to address these limitations and enable safe deployment-time policy adaptation in real-world robot control. The experiments show that our method enables the policy to adapt and fit to the current domain distribution and environment dynamics of the real system while minimizing safety risks and avoiding issues like catastrophic forgetting of the general policy found in randomized simulation during the pretraining phase. Videos and supplementary material are available at https://safe-cda.github.io/.
ACROSS: A Deformation-Based Cross-Modal Representation for Robotic Tactile Perception
Nov 13, 2024



Tactile perception is essential for human interaction with the environment and is becoming increasingly crucial in robotics. Tactile sensors like the BioTac mimic human fingertips and provide detailed interaction data. Despite its utility in applications like slip detection and object identification, this sensor is now deprecated, making many existing valuable datasets obsolete. However, recreating similar datasets with newer sensor technologies is both tedious and time-consuming. Therefore, it is crucial to adapt these existing datasets for use with new setups and modalities. In response, we introduce ACROSS, a novel framework for translating data between tactile sensors by exploiting sensor deformation information. We demonstrate the approach by translating BioTac signals into the DIGIT sensor. Our framework consists of first converting the input signals into 3D deformation meshes. We then transition from the 3D deformation mesh of one sensor to the mesh of another, and finally convert the generated 3D deformation mesh into the corresponding output space. We demonstrate our approach to the most challenging problem of going from a low-dimensional tactile representation to a high-dimensional one. In particular, we transfer the tactile signals of a BioTac sensor to DIGIT tactile images. Our approach enables the continued use of valuable datasets and the exchange of data between groups with different setups.
Transferring Tactile Data Across Sensors
Oct 18, 2024

Tactile perception is essential for human interaction with the environment and is becoming increasingly crucial in robotics. Tactile sensors like the BioTac mimic human fingertips and provide detailed interaction data. Despite its utility in applications like slip detection and object identification, this sensor is now deprecated, making many existing datasets obsolete. This article introduces a novel method for translating data between tactile sensors by exploiting sensor deformation information rather than output signals. We demonstrate the approach by translating BioTac signals into the DIGIT sensor. Our framework consists of three steps: first, converting signal data into corresponding 3D deformation meshes; second, translating these 3D deformation meshes from one sensor to another; and third, generating output images using the converted meshes. Our approach enables the continued use of valuable datasets.
Optimizing BioTac Simulation for Realistic Tactile Perception
Apr 16, 2024



Tactile sensing presents a promising opportunity for enhancing the interaction capabilities of today's robots. BioTac is a commonly used tactile sensor that enables robots to perceive and respond to physical tactile stimuli. However, the sensor's non-linearity poses challenges in simulating its behavior. In this paper, we first investigate a BioTac simulation that uses temperature, force, and contact point positions to predict the sensor outputs. We show that training with BioTac temperature readings does not yield accurate sensor output predictions during deployment. Consequently, we tested three alternative models, i.e., an XGBoost regressor, a neural network, and a transformer encoder. We train these models without temperature readings and provide a detailed investigation of the window size of the input vectors. We demonstrate that we achieve statistically significant improvements over the baseline network. Furthermore, our results reveal that the XGBoost regressor and transformer outperform traditional feed-forward neural networks in this task. We make all our code and results available online on https://github.com/wzaielamri/Optimizing_BioTac_Simulation.
Continual Domain Randomization
Mar 18, 2024Domain Randomization (DR) is commonly used for sim2real transfer of reinforcement learning (RL) policies in robotics. Most DR approaches require a simulator with a fixed set of tunable parameters from the start of the training, from which the parameters are randomized simultaneously to train a robust model for use in the real world. However, the combined randomization of many parameters increases the task difficulty and might result in sub-optimal policies. To address this problem and to provide a more flexible training process, we propose Continual Domain Randomization (CDR) for RL that combines domain randomization with continual learning to enable sequential training in simulation on a subset of randomization parameters at a time. Starting from a model trained in a non-randomized simulation where the task is easier to solve, the model is trained on a sequence of randomizations, and continual learning is employed to remember the effects of previous randomizations. Our robotic reaching and grasping tasks experiments show that the model trained in this fashion learns effectively in simulation and performs robustly on the real robot while matching or outperforming baselines that employ combined randomization or sequential randomization without continual learning. Our code and videos are available at https://continual-dr.github.io/.
A Biomimetic Fingerprint for Robotic Tactile Sensing
Jul 04, 2023Tactile sensors have been developed since the early '70s and have greatly improved, but there are still no widely adopted solutions. Various technologies, such as capacitive, piezoelectric, piezoresistive, optical, and magnetic, are used in haptic sensing. However, most sensors are not mechanically robust for many applications and cannot cope well with curved or sizeable surfaces. Aiming to address this problem, we present a 3D-printed fingerprint pattern to enhance the body-borne vibration signal for dynamic tactile feedback. The 3D-printed fingerprint patterns were designed and tested for an RH8D Adult size Robot Hand. The patterns significantly increased the signal's power to over 11 times the baseline. A public haptic dataset including 52 objects of several materials was created using the best fingerprint pattern and material.
Quantifying the Effect of Feedback Frequency in Interactive Reinforcement Learning for Robotic Tasks
Jul 20, 2022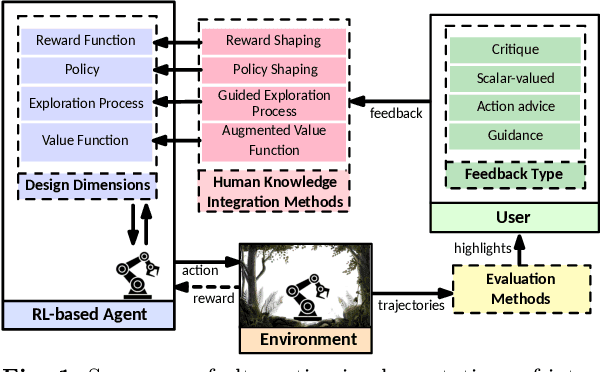

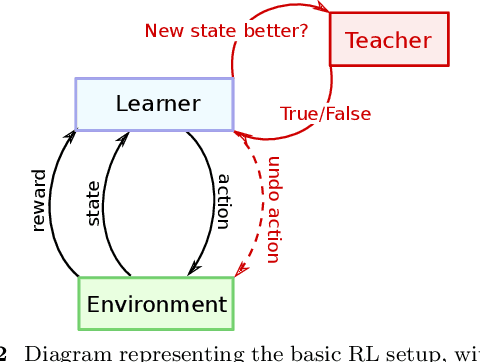
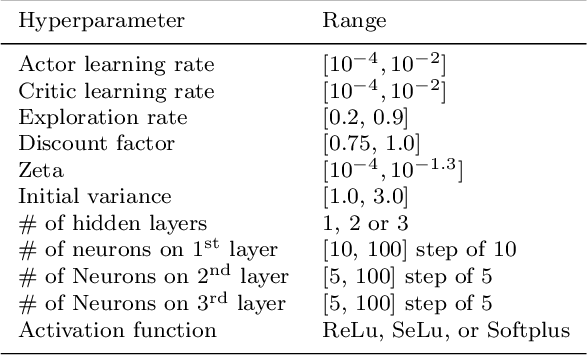
Reinforcement learning (RL) has become widely adopted in robot control. Despite many successes, one major persisting problem can be very low data efficiency. One solution is interactive feedback, which has been shown to speed up RL considerably. As a result, there is an abundance of different strategies, which are, however, primarily tested on discrete grid-world and small scale optimal control scenarios. In the literature, there is no consensus about which feedback frequency is optimal or at which time the feedback is most beneficial. To resolve these discrepancies we isolate and quantify the effect of feedback frequency in robotic tasks with continuous state and action spaces. The experiments encompass inverse kinematics learning for robotic manipulator arms of different complexity. We show that seemingly contradictory reported phenomena occur at different complexity levels. Furthermore, our results suggest that no single ideal feedback frequency exists. Rather that feedback frequency should be changed as the agent's proficiency in the task increases.