 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Understanding of Deformable Linear Objects: Datasets and Transferability Benchmark
Oct 13, 2023



Deformable linear objects are vastly represented in our everyday lives. It is often challenging even for humans to visually understand them, as the same object can be entangled so that it appears completely different. Examples of deformable linear objects include blood vessels and wiring harnesses, vital to the functioning of their corresponding systems, such as the human body and a vehicle. However, no point cloud datasets exist for studying 3D deformable linear objects. Therefore, we are introducing two point cloud datasets, PointWire and PointVessel. We evaluated state-of-the-art methods on the proposed large-scale 3D deformable linear object benchmarks. Finally, we analyzed the generalization capabilities of these methods by conducting transferability experiments on the PointWire and PointVessel datasets.
Analysis of Randomization Effects on Sim2Real Transfer in Reinforcement Learning for Robotic Manipulation Tasks
Jun 13, 2022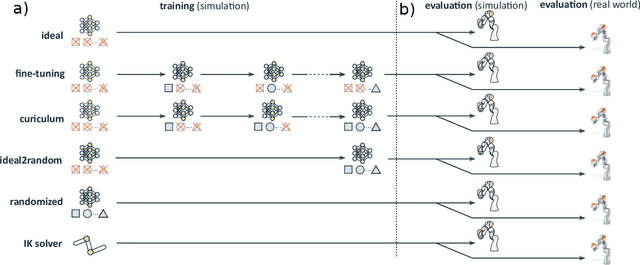
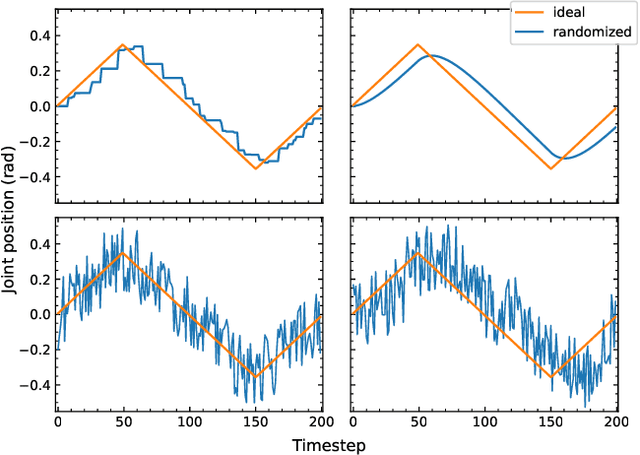

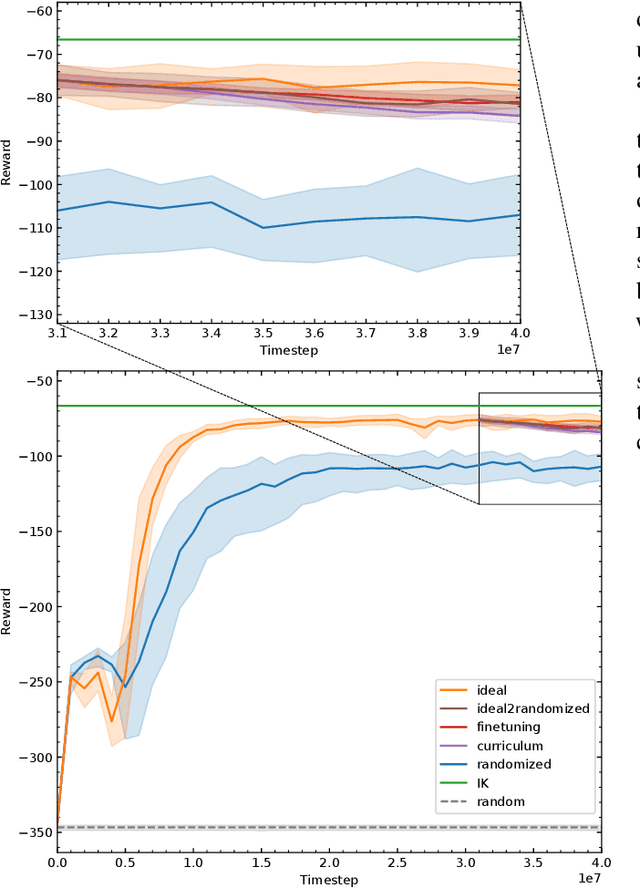
Randomization is currently a widely used approach in Sim2Real transfer for data-driven learning algorithms in robotics. Still, most Sim2Real studies report results for a specific randomization technique and often on a highly customized robotic system, making it difficult to evaluate different randomization approaches systematically. To address this problem, we define an easy-to-reproduce experimental setup for a robotic reach-and-balance manipulator task, which can serve as a benchmark for comparison. We compare four randomization strategies with three randomized parameters both in simulation and on a real robot. Our results show that more randomization helps in Sim2Real transfer, yet it can also harm the ability of the algorithm to find a good policy in simulation. Fully randomized simulations and fine-tuning show differentiated results and translate better to the real robot than the other approaches tested.