 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnmasking the Unknown: Facial Deepfake Detection in the Open-Set Paradigm
Mar 11, 2025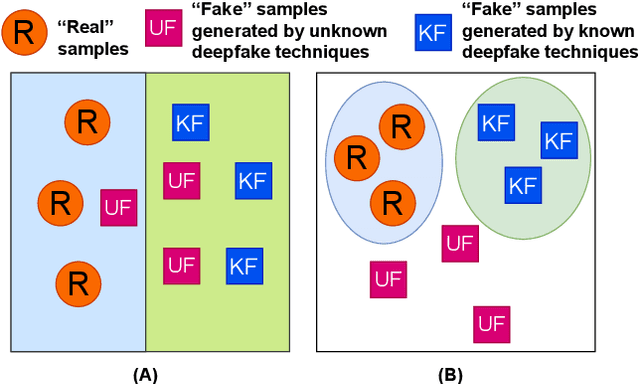
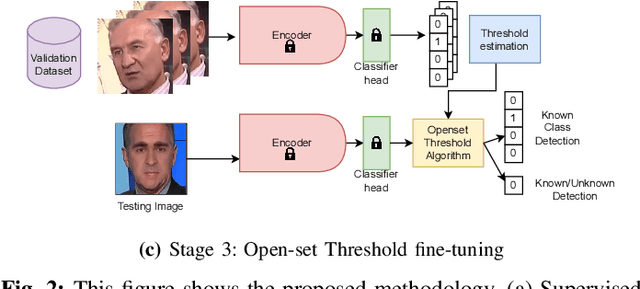
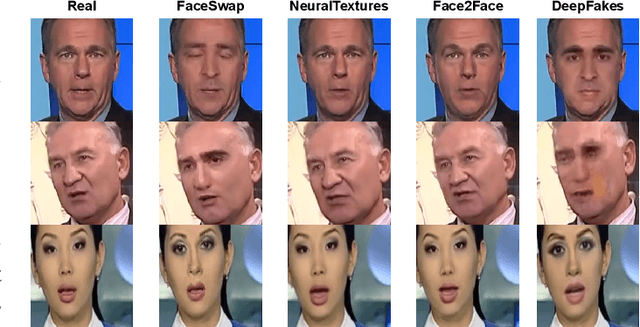
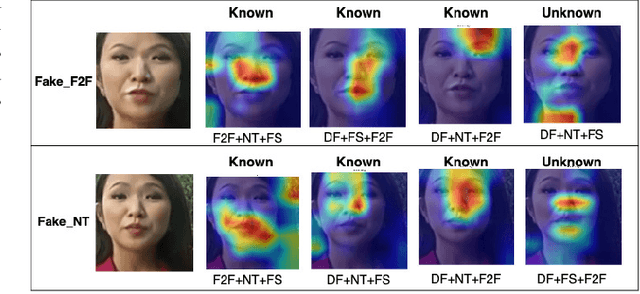
Facial forgery methods such as deepfakes can be misused for identity manipulation and spreading misinformation. They have evolved alongside advancements in generative AI, leading to new and more sophisticated forgery techniques that diverge from existing 'known' methods. Conventional deepfake detection methods use the closedset paradigm, thus limiting their applicability to detecting forgeries created using methods that are not part of the training dataset. In this paper, we propose a shift from the closed-set paradigm for deepfake detection. In the open-set paradigm, models are designed not only to identify images created by known facial forgery methods but also to identify and flag those produced by previously unknown methods as 'unknown' and not as unforged/real/unmanipulated. In this paper, we propose an open-set deepfake classification algorithm based on supervised contrastive learning. The open-set paradigm used in our model allows it to function as a more robust tool capable of handling emerging and unseen deepfake techniques, enhancing reliability and confidence, and complementing forensic analysis. In open-set paradigm, we identify three groups including the "unknown group that is neither considered known deepfake nor real. We investigate deepfake open-set classification across three scenarios, classifying deepfakes from unknown methods not as real, distinguishing real images from deepfakes, and classifying deepfakes from known methods, using the FaceForensics++ dataset as a benchmark. Our method achieves state of the art results in the first two tasks and competitive results in the third task.
SphOR: A Representation Learning Perspective on Open-set Recognition for Identifying Unknown Classes in Deep Learning Models
Mar 11, 2025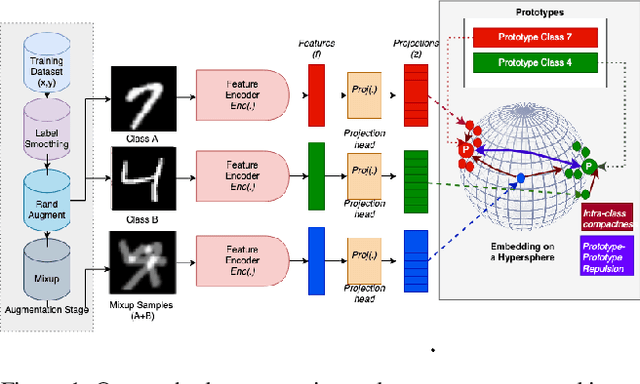



The widespread use of deep learning classifiers necessitates Open-set recognition (OSR), which enables the identification of input data not only from classes known during training but also from unknown classes that might be present in test data. Many existing OSR methods are computationally expensive due to the reliance on complex generative models or suffer from high training costs. We investigate OSR from a representation-learning perspective, specifically through spherical embeddings. We introduce SphOR, a computationally efficient representation learning method that models the feature space as a mixture of von Mises-Fisher distributions. This approach enables the use of semantically ambiguous samples during training, to improve the detection of samples from unknown classes. We further explore the relationship between OSR performance and key representation learning properties which influence how well features are structured in high-dimensional space. Extensive experiments on multiple OSR benchmarks demonstrate the effectiveness of our method, producing state-of-the-art results, with improvements up-to 6% that validate its performance.
Dynamic Template Initialization for Part-Aware Person Re-ID
Aug 24, 2022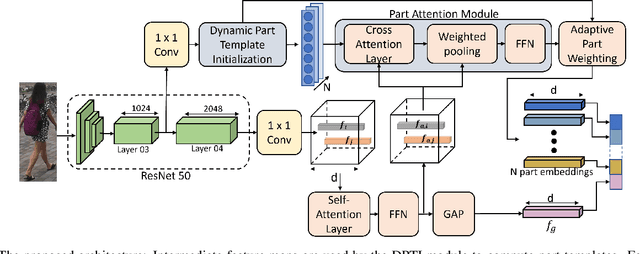
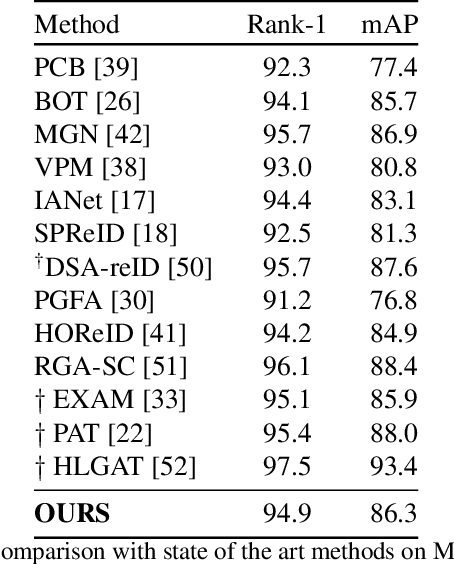
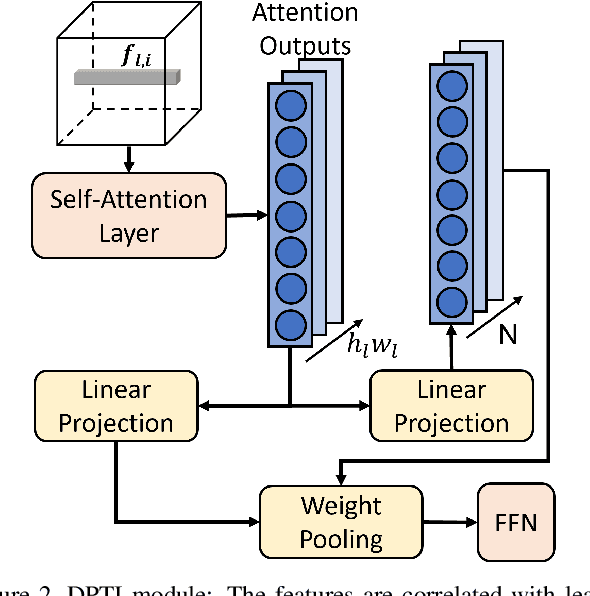
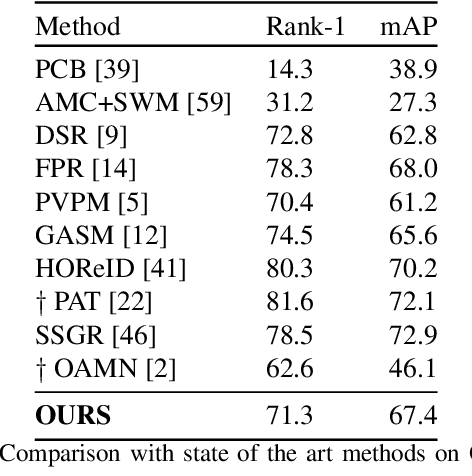
Many of the existing Person Re-identification (Re-ID) approaches depend on feature maps which are either partitioned to localize parts of a person or reduced to create a global representation. While part localization has shown significant success, it uses either na{\i}ve position-based partitions or static feature templates. These, however, hypothesize the pre-existence of the parts in a given image or their positions, ignoring the input image-specific information which limits their usability in challenging scenarios such as Re-ID with partial occlusions and partial probe images. In this paper, we introduce a spatial attention-based Dynamic Part Template Initialization module that dynamically generates part-templates using mid-level semantic features at the earlier layers of the backbone. Following a self-attention layer, human part-level features of the backbone are used to extract the templates of diverse human body parts using a simplified cross-attention scheme which will then be used to identify and collate representations of various human parts from semantically rich features, increasing the discriminative ability of the entire model. We further explore adaptive weighting of part descriptors to quantify the absence or occlusion of local attributes and suppress the contribution of the corresponding part descriptors to the matching criteria. Extensive experiments on holistic, occluded, and partial Re-ID task benchmarks demonstrate that our proposed architecture is able to achieve competitive performance. Codes will be included in the supplementary material and will be made publicly available.
Anomaly Detection using Deep Reconstruction and Forecasting for Autonomous Systems
Jun 25, 2020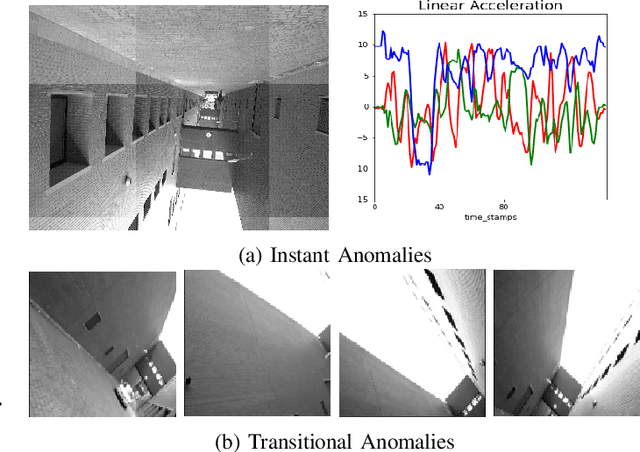

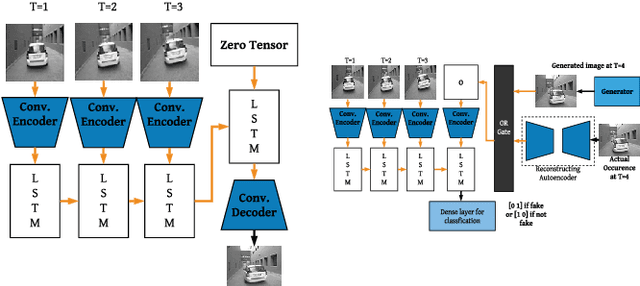

We propose self-supervised deep algorithms to detect anomalies in heterogeneous autonomous systems using frontal camera video and IMU readings. Given that the video and IMU data are not synchronized, each of them are analyzed separately. The vision-based system, which utilizes a conditional GAN, analyzes immediate-past three frames and attempts to predict the next frame. The frame is classified as either an anomalous case or a normal case based on the degree of difference estimated using the prediction error and a threshold. The IMU-based system utilizes two approaches to classify the timestamps; the first being an LSTM autoencoder which reconstructs three consecutive IMU vectors and the second being an LSTM forecaster which is utilized to predict the next vector using the previous three IMU vectors. Based on the reconstruction error, the prediction error, and a threshold, the timestamp is classified as either an anomalous case or a normal case. The composition of algorithms won runners up at the IEEE Signal Processing Cup anomaly detection challenge 2020. In the competition dataset of camera frames consisting of both normal and anomalous cases, we achieve a test accuracy of 94% and an F1-score of 0.95. Furthermore, we achieve an accuracy of 100% on a test set containing normal IMU data, and an F1-score of 0.98 on the test set of abnormal IMU data.