 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robotic Drilling System for Mice Cranial Window Creation: An Evaluation with an Egg Model
Mar 22, 2023Robotic assistance for experimental manipulation in the life sciences is expected to enable precise manipulation of valuable samples, regardless of the skill of the scientist. Experimental specimens in the life sciences are subject to individual variability and deformation, and therefore require autonomous robotic control. As an example, we are studying the installation of a cranial window in a mouse. This operation requires the removal of the skull, which is approximately 300 um thick, to cut it into a circular shape 8 mm in diameter, but the shape of the mouse skull varies depending on the strain of mouse, sex and week of age. The thickness of the skull is not uniform, with some areas being thin and others thicker. It is also difficult to ensure that the skulls of the mice are kept in the same position for each operation. It is not realistically possible to measure all these features and pre-program a robotic trajectory for individual mice. The paper therefore proposes an autonomous robotic drilling method. The proposed method consists of drilling trajectory planning and image-based task completion level recognition. The trajectory planning adjusts the z-position of the drill according to the task completion level at each discrete point, and forms the 3D drilling path via constrained cubic spline interpolation while avoiding overshoot. The task completion level recognition uses a DSSD-inspired deep learning model to estimate the task completion level of each discrete point. Since an egg has similar characteristics to a mouse skull in terms of shape, thickness and mechanical properties, removing the egg shell without damaging the membrane underneath was chosen as the simulation task. The proposed method was evaluated using a 6-DOF robotic arm holding a drill and achieved a success rate of 80% out of 20 trials.
UMIRobot: An Open-{Software, Hardware} Low-Cost Robotic Manipulator for Education
Jan 17, 2023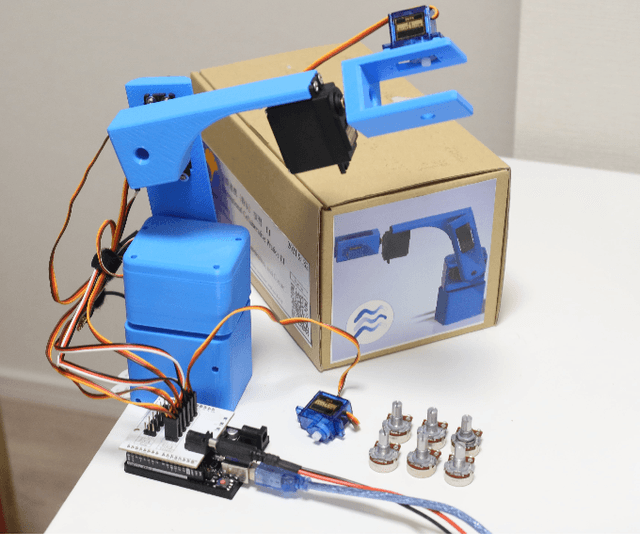
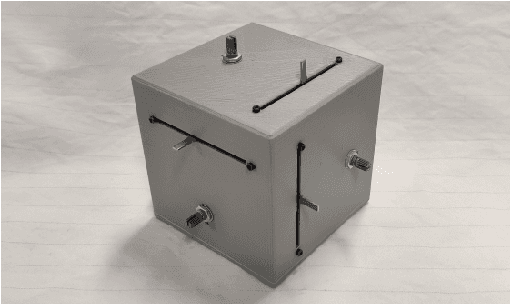
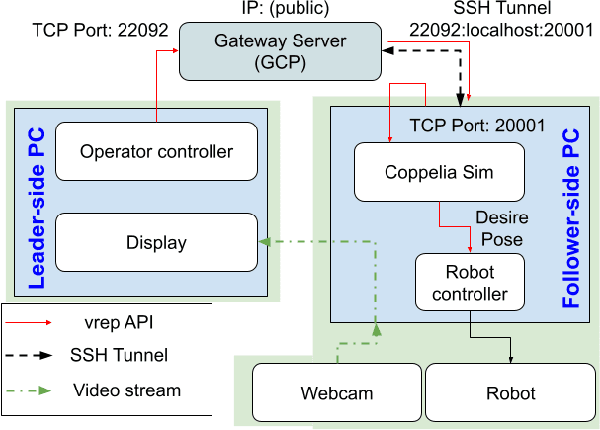

Robot teleoperation has been studied for the past 70 years and is relevant in many contexts, such as in the handling of hazardous materials and telesurgery. The COVID19 pandemic has rekindled interest in this topic, but the existing robotic education kits fail short of being suitable for teleoperated robotic manipulator learning. In addition, the global restrictions of motion motivated large investments in online/hybrid education. In this work, a newly developed robotics education kit and its ecosystem are presented which is used as the backbone of an online/hybrid course in teleoperated robots. The students are assembled into teams, design, fabricate, and control a master device and gripper, and compete in a teleoperation challenge. The kit is low cost (< 100USD), which allows higher-learning institutions to provide one kit per student and they can learn in a risk-free environment. As of now, 53 such kits have been assembled and sent to course participants in eight countries. As major success stories, we show an example of gripper and master designed for the proposed course. In addition, we show a teleoperated task between Japan and Bangladesh executed by course participants. Design files, videos, and more information available at https://mmmarinho.github.io/UMIRobot/
Autonomous Coordinated Control of the Light Guide for Positioning in Vitreoretinal Surgery
Jul 26, 2021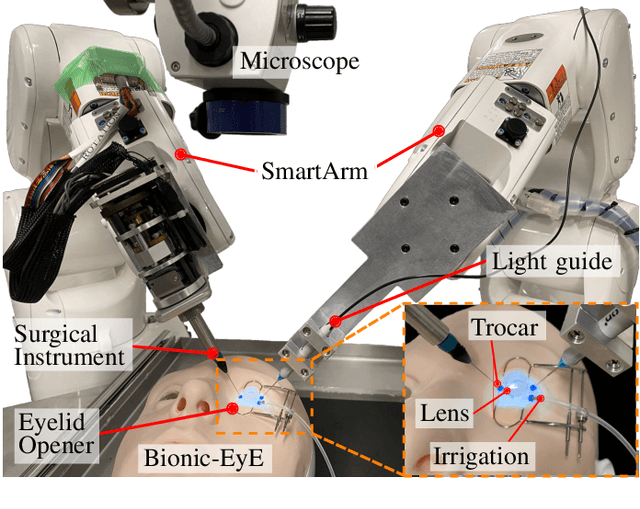
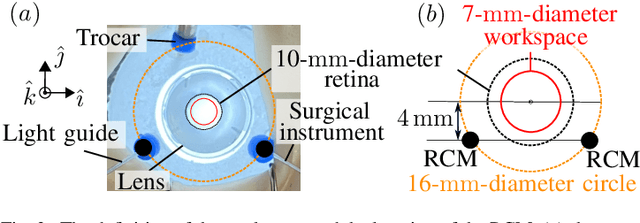
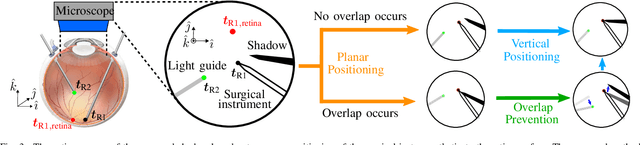
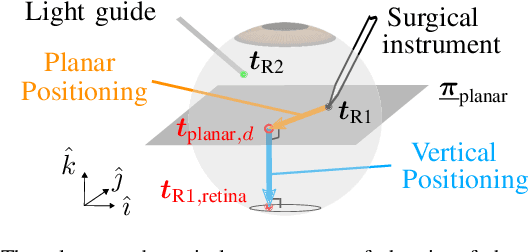
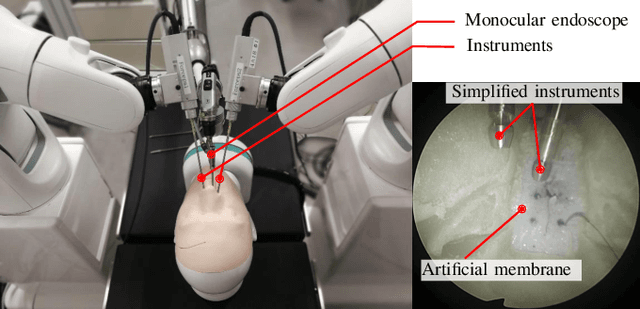
Vitreoretinal surgery is challenging even for expert surgeons owing to the delicate target tissues and the diminutive 7-mm-diameter workspace in the retina. In addition to improved dexterity and accuracy, robot assistance allows for (partial) task automation. In this work, we propose a strategy to automate the motion of the light guide with respect to the surgical instrument. This automation allows the instrument's shadow to always be inside the microscopic view, which is an important cue for the accurate positioning of the instrument in the retina. We show simulations and experiments demonstrating that the proposed strategy is effective in a 700-point grid in the retina of a surgical phantom.
SmartArm: Suturing Feasibility of a Surgical Robotic System on a Neonatal Chest Model
Jan 04, 2021



Commercially available surgical-robot technology currently addresses many surgical scenarios for adult patients. This same technology cannot be used to the benefit of neonate patients given the considerably smaller workspace. Medically relevant procedures regarding neonate patients include minimally invasive surgery to repair congenital esophagus disorders, which entail the suturing of the fragile esophagus within the narrow neonate cavity. In this work, we explore the use of the SmartArm robotic system in a feasibility study using a neonate chest and esophagus model. We show that a medically inexperienced operator can perform two-throw knots inside the neonate chest model using the robotic system.
* Accepted on T-MRB 2021, 4 pages
Single-Shot Pose Estimation of Surgical Robot Instruments' Shafts from Monocular Endoscopic Images
Mar 03, 2020


Surgical robots are used to perform minimally invasive surgery and alleviate much of the burden imposed on surgeons. Our group has developed a surgical robot to aid in the removal of tumors at the base of the skull via access through the nostrils. To avoid injuring the patients, a collision-avoidance algorithm that depends on having an accurate model for the poses of the instruments' shafts is used. Given that the model's parameters can change over time owing to interactions between instruments and other disturbances, the online estimation of the poses of the instrument's shaft is essential. In this work, we propose a new method to estimate the pose of the surgical instruments' shafts using a monocular endoscope. Our method is based on the use of an automatically annotated training dataset and an improved pose-estimation deep-learning architecture. In preliminary experiments, we show that our method can surpass state of the art vision-based marker-less pose estimation techniques (providing an error decrease of 55% in position estimation, 64% in pitch, and 69% in yaw) by using artificial images.
* Accepted on ICRA 2020, 7 pages
A Unified Framework for the Teleoperation of Surgical Robots in Constrained Workspaces
Feb 27, 2019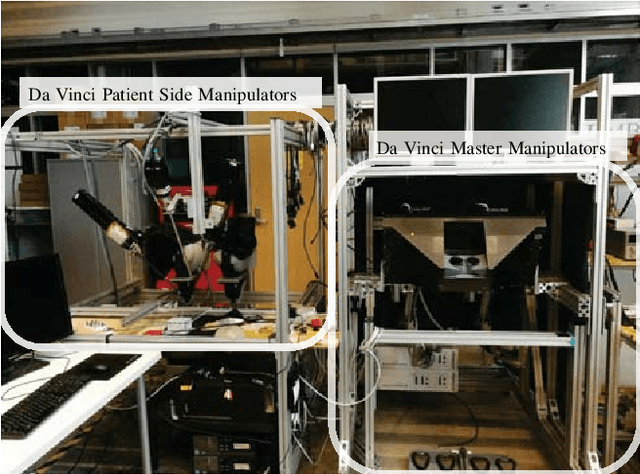
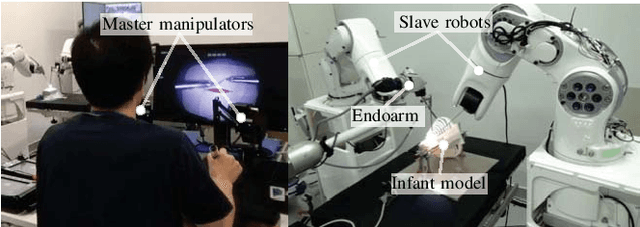
In adult laparoscopy, robot-aided surgery is a reality in thousands of operating rooms worldwide, owing to the increased dexterity provided by the robotic tools. Many robots and robot control techniques have been developed to aid in more challenging scenarios, such as pediatric surgery and microsurgery. However, the prevalence of case-specific solutions, particularly those focused on non-redundant robots, reduces the reproducibility of the initial results in more challenging scenarios. In this paper, we propose a general framework for the control of surgical robotics in constrained workspaces under teleoperation, regardless of the robot geometry. Our technique is divided into a slave-side constrained optimization algorithm, which provides virtual fixtures, and with Cartesian impedance on the master side to provide force feedback. Experiments with two robotic systems, one redundant and one non-redundant, show that smooth teleoperation can be achieved in adult laparoscopy and infant surgery.
* Accepted on ICRA 2019, 7 pages
Dynamic Active Constraints for Surgical Robots using Vector Field Inequalities
Nov 21, 2018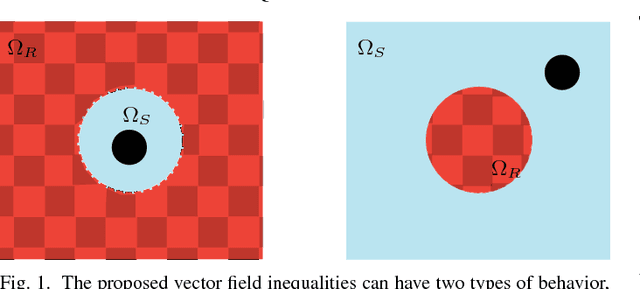
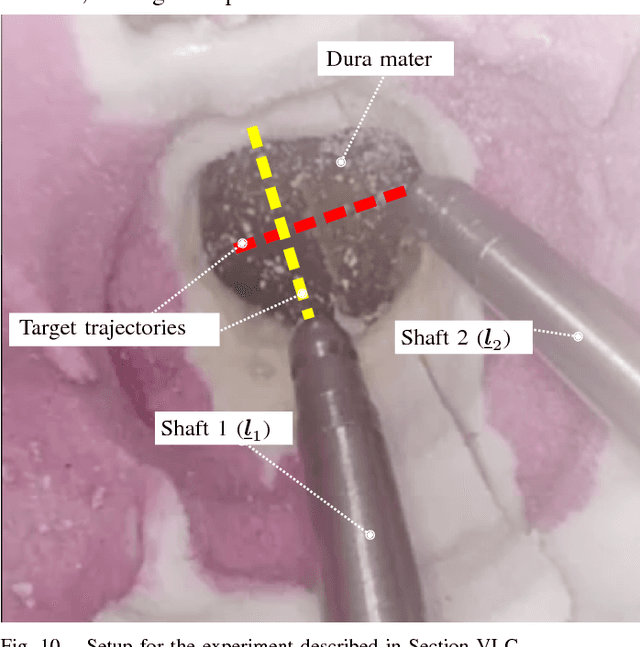
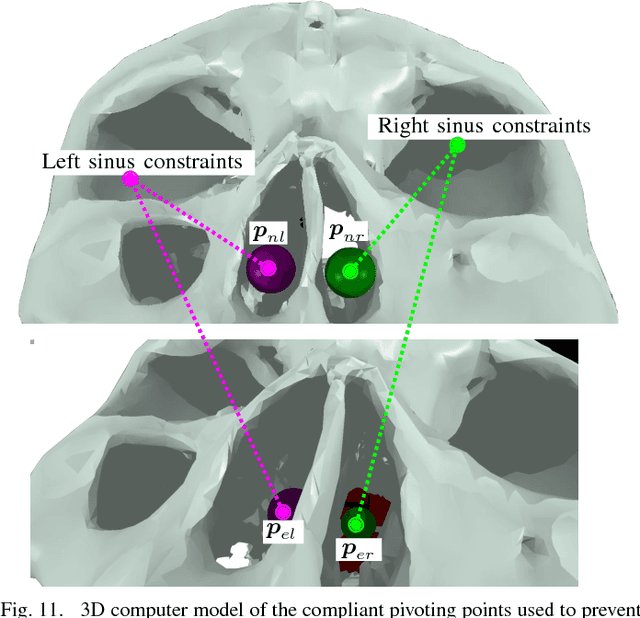
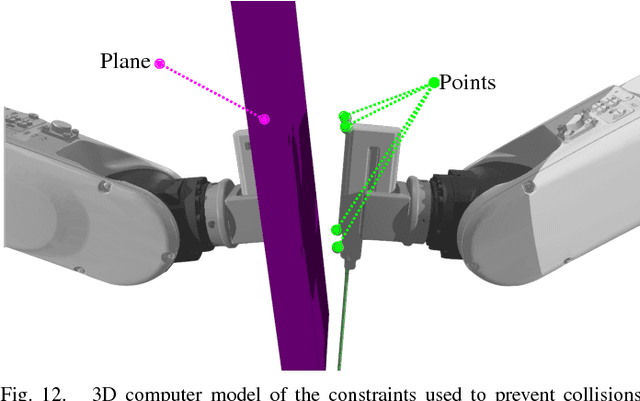
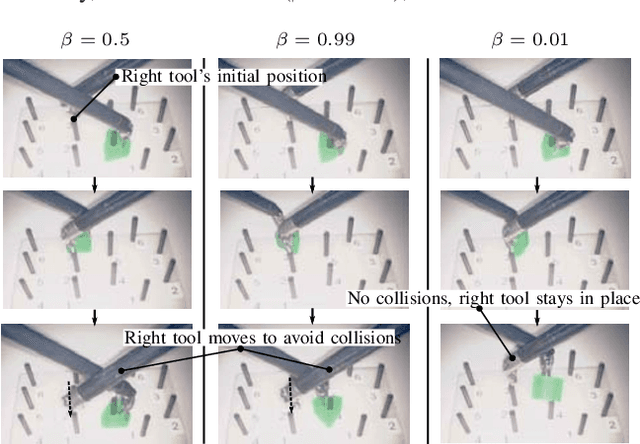
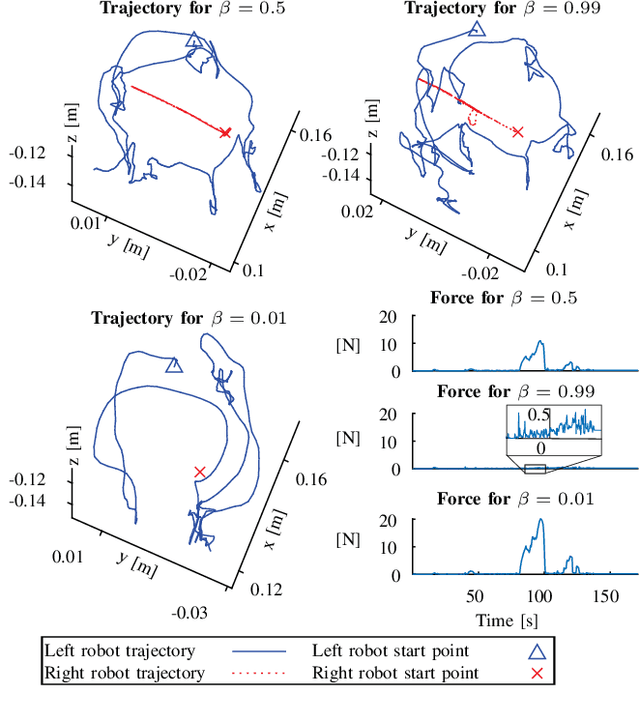
Robotic assistance allows surgeons to perform dexterous and tremor-free procedures, but robotic aid is still underrepresented in procedures with constrained workspaces, such as deep brain neurosurgery and endonasal surgery. In these procedures, surgeons have restricted vision to areas near the surgical tooltips, which increases the risk of unexpected collisions between the shafts of the instruments and their surroundings. In this work, our vector-field-inequalities method is extended to provide dynamic active-constraints to any number of robots and moving objects sharing the same workspace. The method is evaluated with experiments and simulations in which robot tools have to avoid collisions autonomously and in real-time, in a constrained endonasal surgical environment. Simulations show that with our method the combined trajectory error of two robotic systems is optimal. Experiments using a real robotic system show that the method can autonomously prevent collisions between the moving robots themselves and between the robots and the environment. Moreover, the framework is also successfully verified under teleoperation with tool-tissue interactions.
Active Constraints using Vector Field Inequalities for Surgical Robots
Apr 11, 2018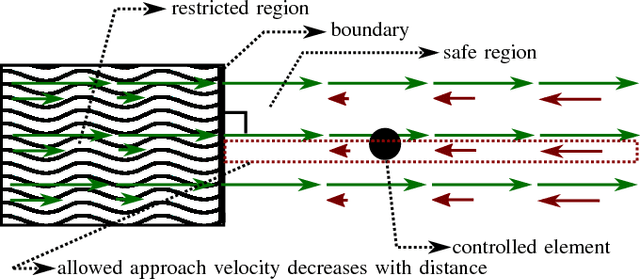
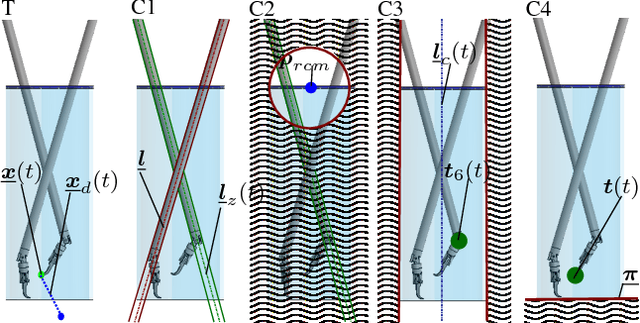
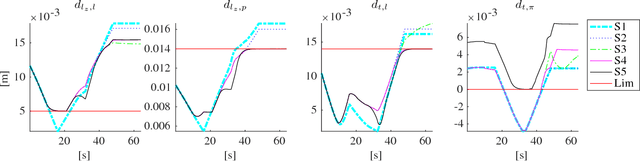
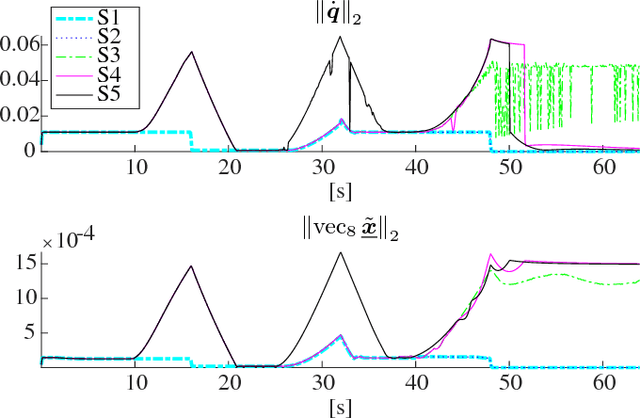
Robotic assistance allows surgeons to perform dexterous and tremor-free procedures, but is still underrepresented in deep brain neurosurgery and endonasal surgery where the workspace is constrained. In these conditions, the vision of surgeons is restricted to areas near the surgical tool tips, which increases the risk of unexpected collisions between the shafts of the instruments and their surroundings, in particular in areas outside the surgical field-of-view. Active constraints can be used to prevent the tools from entering restricted zones and thus avoid collisions. In this paper, a vector field inequality is proposed that guarantees that tools do not enter restricted zones. Moreover, in contrast with early techniques, the proposed method limits the tool approach velocity in the direction of the forbidden zone boundary, guaranteeing a smooth behavior and that tangential velocities will not be disturbed. The proposed method is evaluated in simulations featuring two eight degrees-of-freedom manipulators that were custom-designed for deep neurosurgery. The results show that both manipulator-manipulator and manipulator-boundary collisions can be avoided using the vector field inequalities.
* Accepted on ICRA 2018, 8 pages