 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmartArm: Suturing Feasibility of a Surgical Robotic System on a Neonatal Chest Model
Jan 04, 2021



Commercially available surgical-robot technology currently addresses many surgical scenarios for adult patients. This same technology cannot be used to the benefit of neonate patients given the considerably smaller workspace. Medically relevant procedures regarding neonate patients include minimally invasive surgery to repair congenital esophagus disorders, which entail the suturing of the fragile esophagus within the narrow neonate cavity. In this work, we explore the use of the SmartArm robotic system in a feasibility study using a neonate chest and esophagus model. We show that a medically inexperienced operator can perform two-throw knots inside the neonate chest model using the robotic system.
* Accepted on T-MRB 2021, 4 pages
Virtual Fixture Assistance for Suturing in Robot-Aided Pediatric Endoscopic Surgery
Sep 09, 2019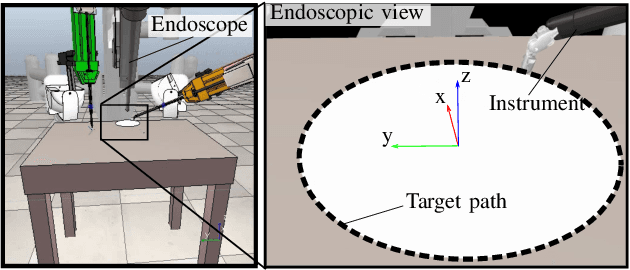
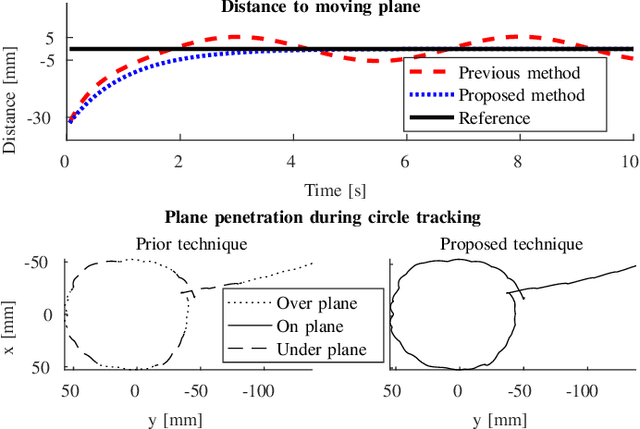

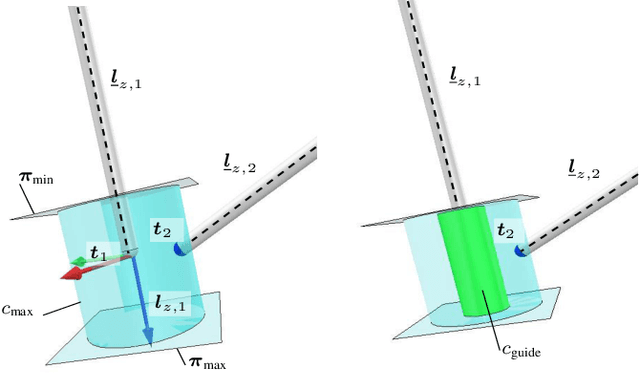
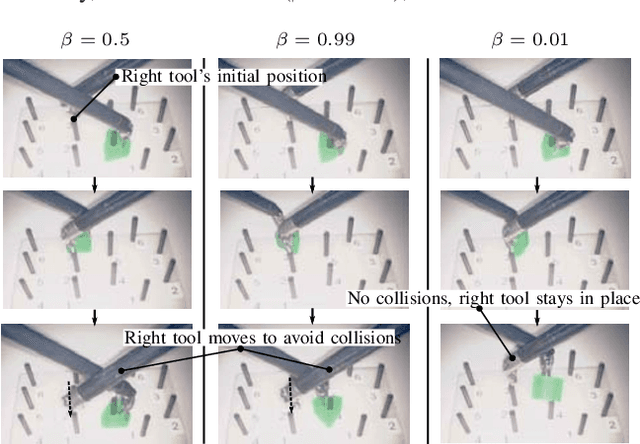
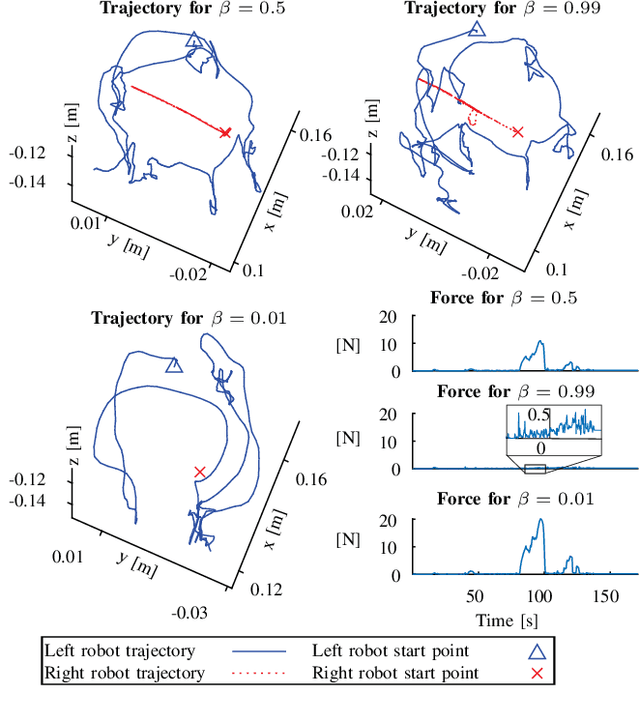
The limited workspace in pediatric endoscopic surgery makes surgical suturing one of the most difficult tasks. During suturing, surgeons have to prevent collisions between tools and also collisions with the surrounding tissues. Surgical robots have been shown to be effective in adult laparoscopy, but assistance for suturing in constrained workspaces has not been yet fully explored. In this letter, we propose guidance virtual fixtures to enhance the performance and the safety of suturing while generating the required task constraints using constrained optimization and Cartesian force feedback. We propose two guidance methods: looping virtual fixtures and a trajectory guidance cylinder, that are based on dynamic geometric elements. In simulations and experiments with a physical robot, we show that the proposed methods achieve a more precise and safer looping in robot-assisted pediatric endoscopy.
A Unified Framework for the Teleoperation of Surgical Robots in Constrained Workspaces
Feb 27, 2019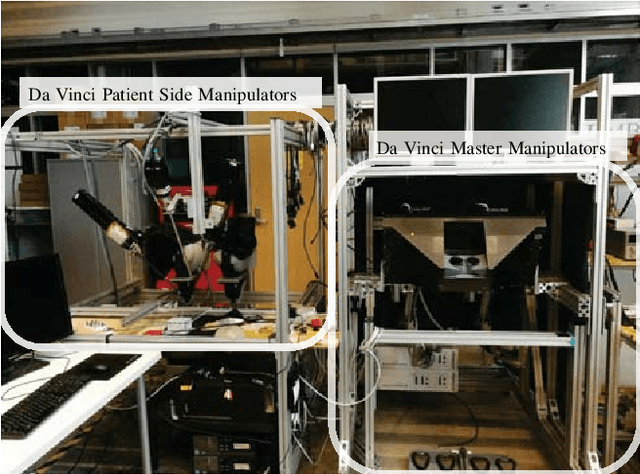
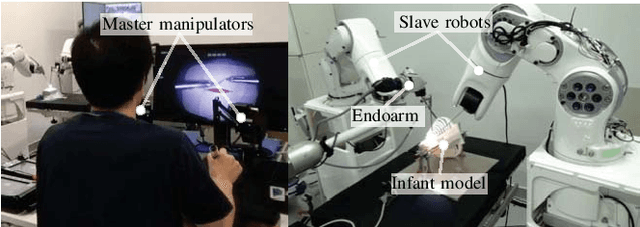
In adult laparoscopy, robot-aided surgery is a reality in thousands of operating rooms worldwide, owing to the increased dexterity provided by the robotic tools. Many robots and robot control techniques have been developed to aid in more challenging scenarios, such as pediatric surgery and microsurgery. However, the prevalence of case-specific solutions, particularly those focused on non-redundant robots, reduces the reproducibility of the initial results in more challenging scenarios. In this paper, we propose a general framework for the control of surgical robotics in constrained workspaces under teleoperation, regardless of the robot geometry. Our technique is divided into a slave-side constrained optimization algorithm, which provides virtual fixtures, and with Cartesian impedance on the master side to provide force feedback. Experiments with two robotic systems, one redundant and one non-redundant, show that smooth teleoperation can be achieved in adult laparoscopy and infant surgery.
* Accepted on ICRA 2019, 7 pages