 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Fixture Assistance for Suturing in Robot-Aided Pediatric Endoscopic Surgery
Paper and Code
Sep 09, 2019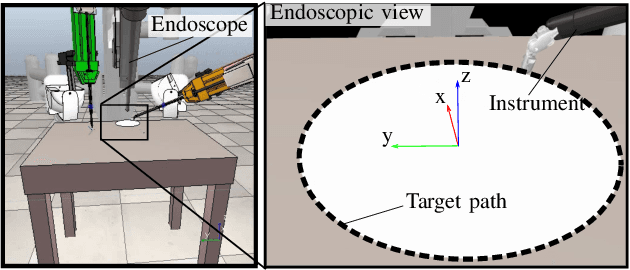
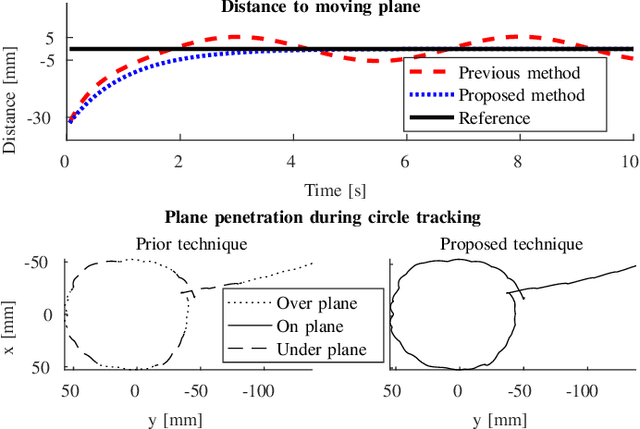

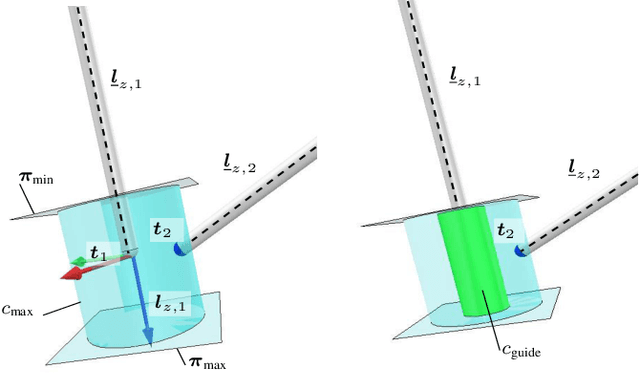
The limited workspace in pediatric endoscopic surgery makes surgical suturing one of the most difficult tasks. During suturing, surgeons have to prevent collisions between tools and also collisions with the surrounding tissues. Surgical robots have been shown to be effective in adult laparoscopy, but assistance for suturing in constrained workspaces has not been yet fully explored. In this letter, we propose guidance virtual fixtures to enhance the performance and the safety of suturing while generating the required task constraints using constrained optimization and Cartesian force feedback. We propose two guidance methods: looping virtual fixtures and a trajectory guidance cylinder, that are based on dynamic geometric elements. In simulations and experiments with a physical robot, we show that the proposed methods achieve a more precise and safer looping in robot-assisted pediatric endoscopy.