 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSF-Mamba: Rethinking State Space Model for Vision
Mar 17, 2026The realm of Mamba for vision has been advanced in recent years to strike for the alternatives of Vision Transformers (ViTs) that suffer from the quadratic complexity. While the recurrent scanning mechanism of Mamba offers computational efficiency, it inherently limits non-causal interactions between image patches. Prior works have attempted to address this limitation through various multi-scan strategies; however, these approaches suffer from inefficiencies due to suboptimal scan designs and frequent data rearrangement. Moreover, Mamba exhibits relatively slow computational speed under short token lengths, commonly used in visual tasks. In pursuit of a truly efficient vision encoder, we rethink the scan operation for vision and the computational efficiency of Mamba. To this end, we propose SF-Mamba, a novel visual Mamba with two key proposals: auxiliary patch swapping for encoding bidirectional information flow under an unidirectional scan and batch folding with periodic state reset for advanced GPU parallelism. Extensive experiments on image classification, object detection, and instance and semantic segmentation consistently demonstrate that our proposed SF-Mamba significantly outperforms state-of-the-art baselines while improving throughput across different model sizes. We will release the source code after publication.
Online Data Curation for Object Detection via Marginal Contributions to Dataset-level Average Precision
Nov 18, 2025High-quality data has become a primary driver of progress under scale laws, with curated datasets often outperforming much larger unfiltered ones at lower cost. Online data curation extends this idea by dynamically selecting training samples based on the model's evolving state. While effective in classification and multimodal learning, existing online sampling strategies rarely extend to object detection because of its structural complexity and domain gaps. We introduce DetGain, an online data curation method specifically for object detection that estimates the marginal perturbation of each image to dataset-level Average Precision (AP) based on its prediction quality. By modeling global score distributions, DetGain efficiently estimates the global AP change and computes teacher-student contribution gaps to select informative samples at each iteration. The method is architecture-agnostic and minimally intrusive, enabling straightforward integration into diverse object detection architectures. Experiments on the COCO dataset with multiple representative detectors show consistent improvements in accuracy. DetGain also demonstrates strong robustness under low-quality data and can be effectively combined with knowledge distillation techniques to further enhance performance, highlighting its potential as a general and complementary strategy for data-efficient object detection.
SemiISP/SemiIE: Semi-Supervised Image Signal Processor and Image Enhancement Leveraging One-to-Many Mapping sRGB-to-RAW
Apr 03, 2025DNN-based methods have been successful in Image Signal Processor (ISP) and image enhancement (IE) tasks. However, the cost of creating training data for these tasks is considerably higher than for other tasks, making it difficult to prepare large-scale datasets. Also, creating personalized ISP and IE with minimal training data can lead to new value streams since preferred image quality varies depending on the person and use case. While semi-supervised learning could be a potential solution in such cases, it has rarely been utilized for these tasks. In this paper, we realize semi-supervised learning for ISP and IE leveraging a RAW image reconstruction (sRGB-to-RAW) method. Although existing sRGB-to-RAW methods can generate pseudo-RAW image datasets that improve the accuracy of RAW-based high-level computer vision tasks such as object detection, their quality is not sufficient for ISP and IE tasks that require precise image quality definition. Therefore, we also propose a sRGB-to-RAW method that can improve the image quality of these tasks. The proposed semi-supervised learning with the proposed sRGB-to-RAW method successfully improves the image quality of various models on various datasets.
Beyond RGB: Adaptive Parallel Processing for RAW Object Detection
Mar 17, 2025Object detection models are typically applied to standard RGB images processed through Image Signal Processing (ISP) pipelines, which are designed to enhance sensor-captured RAW images for human vision. However, these ISP functions can lead to a loss of critical information that may be essential in optimizing for computer vision tasks, such as object detection. In this work, we introduce Raw Adaptation Module (RAM), a module designed to replace the traditional ISP, with parameters optimized specifically for RAW object detection. Inspired by the parallel processing mechanisms of the human visual system, RAM departs from existing learned ISP methods by applying multiple ISP functions in parallel rather than sequentially, allowing for a more comprehensive capture of image features. These processed representations are then fused in a specialized module, which dynamically integrates and optimizes the information for the target task. This novel approach not only leverages the full potential of RAW sensor data but also enables task-specific pre-processing, resulting in superior object detection performance. Our approach outperforms RGB-based methods and achieves state-of-the-art results across diverse RAW image datasets under varying lighting conditions and dynamic ranges.
MambaPEFT: Exploring Parameter-Efficient Fine-Tuning for Mamba
Nov 06, 2024An ecosystem of Transformer-based models has been established by building large models with extensive data. Parameter-efficient fine-tuning (PEFT) is a crucial technology for deploying these models to downstream tasks with minimal cost while achieving effective performance. Recently, Mamba, a State Space Model (SSM)-based model, has attracted attention as a potential alternative to Transformers. While many large-scale Mamba-based models have been proposed, efficiently adapting pre-trained Mamba-based models to downstream tasks remains unexplored. In this paper, we conduct an exploratory analysis of PEFT methods for Mamba. We investigate the effectiveness of existing PEFT methods for Transformers when applied to Mamba. We also modify these methods to better align with the Mamba architecture. Additionally, we propose new Mamba-specific PEFT methods that leverage the distinctive structure of Mamba. Our experiments indicate that PEFT performs more effectively for Mamba than Transformers. Lastly, we demonstrate how to effectively combine multiple PEFT methods and provide a framework that outperforms previous works. To ensure reproducibility, we will release the code after publication.
Mixed-precision Supernet Training from Vision Foundation Models using Low Rank Adapter
Mar 29, 2024Compression of large and performant vision foundation models (VFMs) into arbitrary bit-wise operations (BitOPs) allows their deployment on various hardware. We propose to fine-tune a VFM to a mixed-precision quantized supernet. The supernet-based neural architecture search (NAS) can be adopted for this purpose, which trains a supernet, and then subnets within arbitrary hardware budgets can be extracted. However, existing methods face difficulties in optimizing the mixed-precision search space and incurring large memory costs during training. To tackle these challenges, first, we study the effective search space design for fine-tuning a VFM by comparing different operators (such as resolution, feature size, width, depth, and bit-widths) in terms of performance and BitOPs reduction. Second, we propose memory-efficient supernet training using a low-rank adapter (LoRA) and a progressive training strategy. The proposed method is evaluated for the recently proposed VFM, Segment Anything Model, fine-tuned on segmentation tasks. The searched model yields about a 95% reduction in BitOPs without incurring performance degradation.
PQDynamicISP: Dynamically Controlled Image Signal Processor for Any Image Sensors Pursuing Perceptual Quality
Mar 15, 2024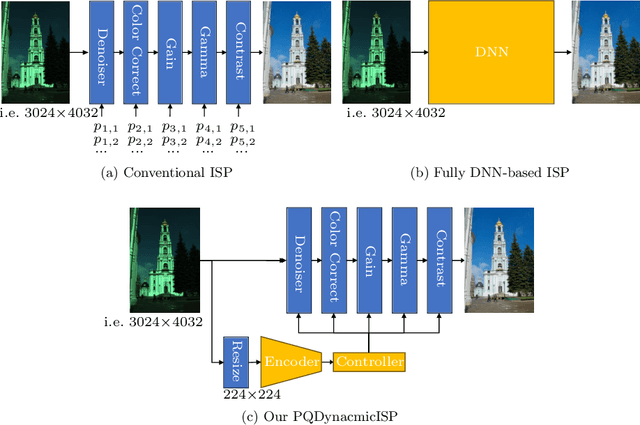
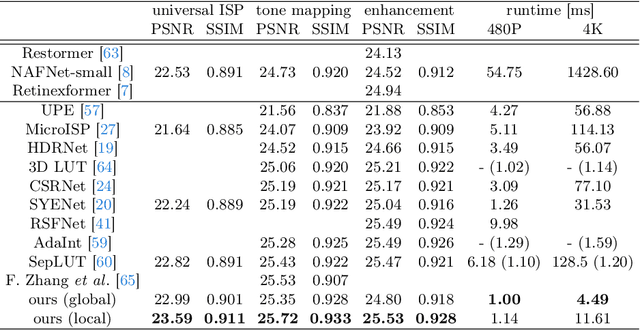
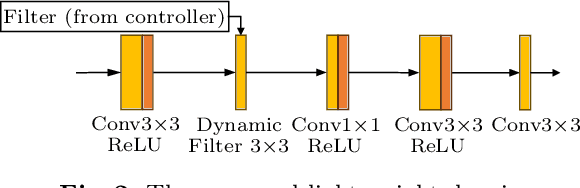
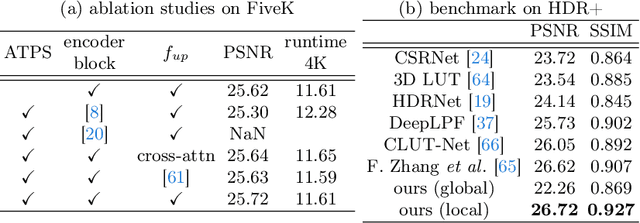
Full DNN-based image signal processors (ISPs) have been actively studied and have achieved superior image quality compared to conventional ISPs. In contrast to this trend, we propose a lightweight ISP that consists of simple conventional ISP functions but achieves high image quality by increasing expressiveness. Specifically, instead of tuning the parameters of the ISP, we propose to control them dynamically for each environment and even locally. As a result, state-of-the-art accuracy is achieved on various datasets, including other tasks like tone mapping and image enhancement, even though ours is lighter than DNN-based ISPs. Additionally, our method can process different image sensors with a single ISP through dynamic control, whereas conventional methods require training for each sensor.
Self-Supervised Reversed Image Signal Processing via Reference-Guided Dynamic Parameter Selection
Mar 24, 2023Unprocessed sensor outputs (RAW images) potentially improve both low-level and high-level computer vision algorithms, but the lack of large-scale RAW image datasets is a barrier to research. Thus, reversed Image Signal Processing (ISP) which converts existing RGB images into RAW images has been studied. However, most existing methods require camera-specific metadata or paired RGB and RAW images to model the conversion, and they are not always available. In addition, there are issues in handling diverse ISPs and recovering global illumination. To tackle these limitations, we propose a self-supervised reversed ISP method that does not require metadata and paired images. The proposed method converts a RGB image into a RAW-like image taken in the same environment with the same sensor as a reference RAW image by dynamically selecting parameters of the reversed ISP pipeline based on the reference RAW image. The parameter selection is trained via pseudo paired data created from unpaired RGB and RAW images. We show that the proposed method is able to learn various reversed ISPs with comparable accuracy to other state-of-the-art supervised methods and convert unknown RGB images from COCO and Flickr1M to target RAW-like images more accurately in terms of pixel distribution. We also demonstrate that our generated RAW images improve performance on real RAW image object detection task.
Efficient Joint Detection and Multiple Object Tracking with Spatially Aware Transformer
Nov 09, 2022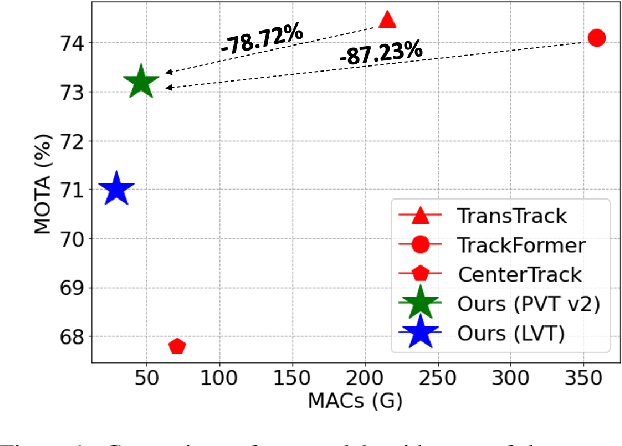
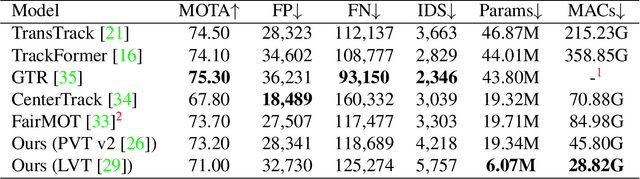
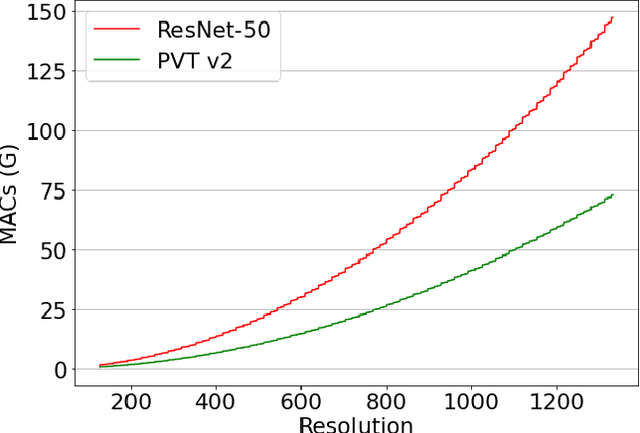
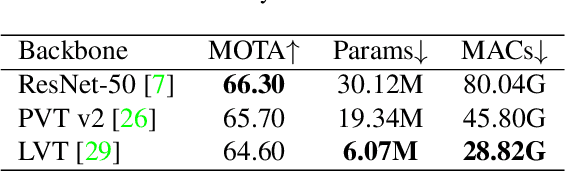
We propose a light-weight and highly efficient Joint Detection and Tracking pipeline for the task of Multi-Object Tracking using a fully-transformer architecture. It is a modified version of TransTrack, which overcomes the computational bottleneck associated with its design, and at the same time, achieves state-of-the-art MOTA score of 73.20%. The model design is driven by a transformer based backbone instead of CNN, which is highly scalable with the input resolution. We also propose a drop-in replacement for Feed Forward Network of transformer encoder layer, by using Butterfly Transform Operation to perform channel fusion and depth-wise convolution to learn spatial context within the feature maps, otherwise missing within the attention maps of the transformer. As a result of our modifications, we reduce the overall model size of TransTrack by 58.73% and the complexity by 78.72%. Therefore, we expect our design to provide novel perspectives for architecture optimization in future research related to multi-object tracking.
DynamicISP: Dynamically Controlled Image Signal Processor for Image Recognition
Nov 02, 2022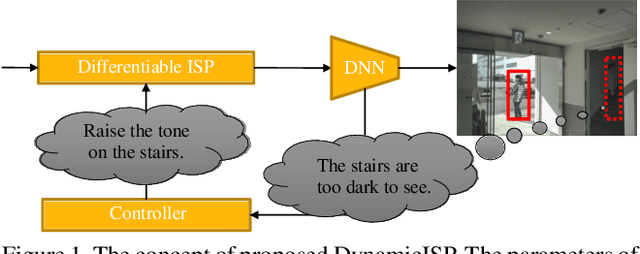
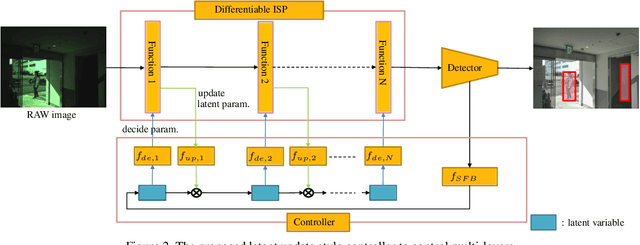
Image signal processor (ISP) plays an important role not only for human perceptual quality but also for computer vision. In most cases, experts resort to manual tuning of many parameters in the ISPs for perceptual quality. It failed in sub-optimal, especially for computer vision. Aiming to improve ISPs, two approaches have been actively proposed; tuning the parameters with machine learning, or constructing an ISP with DNN. The former is lightweight but lacks expressive powers. The latter has expressive powers but it was too heavy to calculate on edge devices. To this end, we propose DynamicISP, which consists of traditional simple ISP functions but their parameters are controlled dynamically per image according to what the downstream image recognition model felt to the previous frame. Our proposed method successfully controlled parameters of multiple ISP functions and got state-of-the-art accuracy with a small computational cost.