 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Field-of-View Adjustment Using Adaptive Kinematic Constrained Control with Robot-Held Microscopic Camera Feedback
Sep 19, 2023Robotic systems for manipulation in millimeter scale often use a camera with high magnification for visual feedback of the target region. However, the limited field-of-view (FoV) of the microscopic camera necessitates camera motion to capture a broader workspace environment. In this work, we propose an autonomous robotic control method to constrain a robot-held camera within a designated FoV. Furthermore, we model the camera extrinsics as part of the kinematic model and use camera measurements coupled with a U-Net based tool tracking to adapt the complete robotic model during task execution. As a proof-of-concept demonstration, the proposed framework was evaluated in a bi-manual setup, where the microscopic camera was controlled to view a tool moving in a pre-defined trajectory. The proposed method allowed the camera to stay 99.5% of the time within the real FoV, compared to 48.1% without the proposed adaptive control.
UMIRobot: An Open-{Software, Hardware} Low-Cost Robotic Manipulator for Education
Jan 17, 2023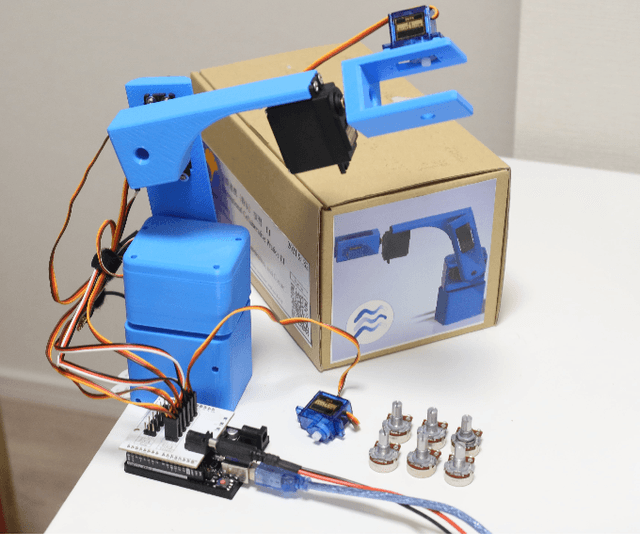
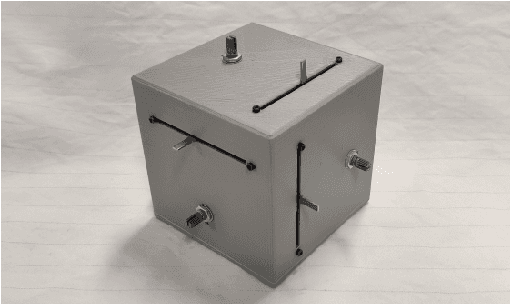
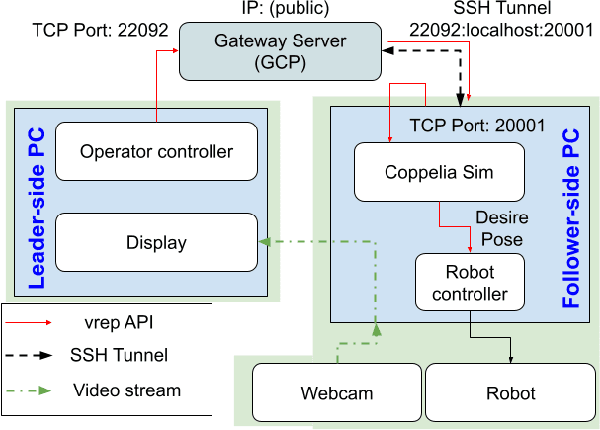

Robot teleoperation has been studied for the past 70 years and is relevant in many contexts, such as in the handling of hazardous materials and telesurgery. The COVID19 pandemic has rekindled interest in this topic, but the existing robotic education kits fail short of being suitable for teleoperated robotic manipulator learning. In addition, the global restrictions of motion motivated large investments in online/hybrid education. In this work, a newly developed robotics education kit and its ecosystem are presented which is used as the backbone of an online/hybrid course in teleoperated robots. The students are assembled into teams, design, fabricate, and control a master device and gripper, and compete in a teleoperation challenge. The kit is low cost (< 100USD), which allows higher-learning institutions to provide one kit per student and they can learn in a risk-free environment. As of now, 53 such kits have been assembled and sent to course participants in eight countries. As major success stories, we show an example of gripper and master designed for the proposed course. In addition, we show a teleoperated task between Japan and Bangladesh executed by course participants. Design files, videos, and more information available at https://mmmarinho.github.io/UMIRobot/