 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Shot Pose Estimation of Surgical Robot Instruments' Shafts from Monocular Endoscopic Images
Paper and Code
Mar 03, 2020
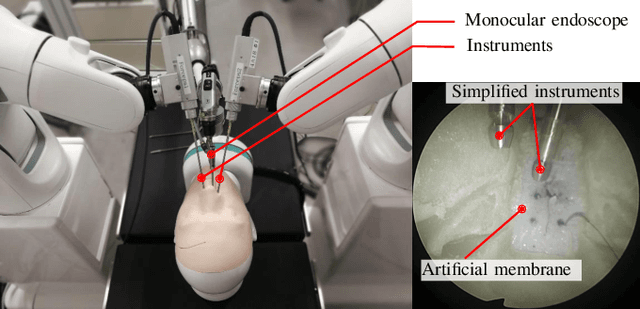


Surgical robots are used to perform minimally invasive surgery and alleviate much of the burden imposed on surgeons. Our group has developed a surgical robot to aid in the removal of tumors at the base of the skull via access through the nostrils. To avoid injuring the patients, a collision-avoidance algorithm that depends on having an accurate model for the poses of the instruments' shafts is used. Given that the model's parameters can change over time owing to interactions between instruments and other disturbances, the online estimation of the poses of the instrument's shaft is essential. In this work, we propose a new method to estimate the pose of the surgical instruments' shafts using a monocular endoscope. Our method is based on the use of an automatically annotated training dataset and an improved pose-estimation deep-learning architecture. In preliminary experiments, we show that our method can surpass state of the art vision-based marker-less pose estimation techniques (providing an error decrease of 55% in position estimation, 64% in pitch, and 69% in yaw) by using artificial images.