 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNL2Repo-Bench: Towards Long-Horizon Repository Generation Evaluation of Coding Agents
Dec 14, 2025Recent advances in coding agents suggest rapid progress toward autonomous software development, yet existing benchmarks fail to rigorously evaluate the long-horizon capabilities required to build complete software systems. Most prior evaluations focus on localized code generation, scaffolded completion, or short-term repair tasks, leaving open the question of whether agents can sustain coherent reasoning, planning, and execution over the extended horizons demanded by real-world repository construction. To address this gap, we present NL2Repo Bench, a benchmark explicitly designed to evaluate the long-horizon repository generation ability of coding agents. Given only a single natural-language requirements document and an empty workspace, agents must autonomously design the architecture, manage dependencies, implement multi-module logic, and produce a fully installable Python library. Our experiments across state-of-the-art open- and closed-source models reveal that long-horizon repository generation remains largely unsolved: even the strongest agents achieve below 40% average test pass rates and rarely complete an entire repository correctly. Detailed analysis uncovers fundamental long-horizon failure modes, including premature termination, loss of global coherence, fragile cross-file dependencies, and inadequate planning over hundreds of interaction steps. NL2Repo Bench establishes a rigorous, verifiable testbed for measuring sustained agentic competence and highlights long-horizon reasoning as a central bottleneck for the next generation of autonomous coding agents.
Scaling Latent Reasoning via Looped Language Models
Oct 29, 2025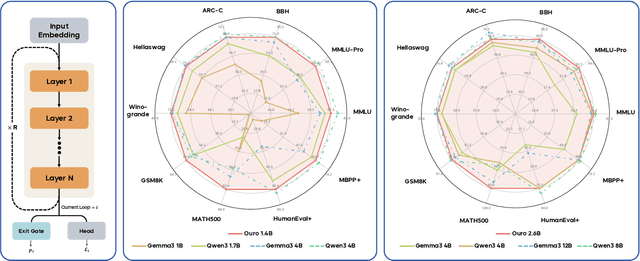
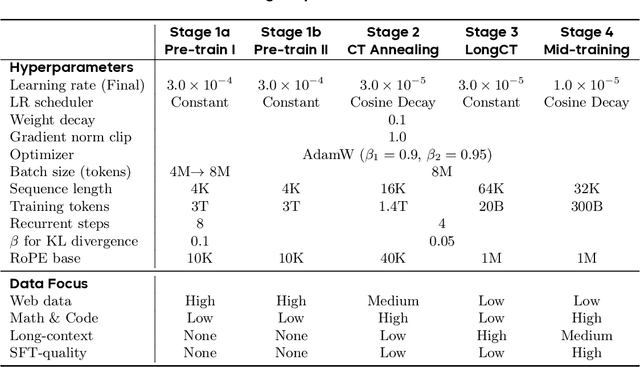
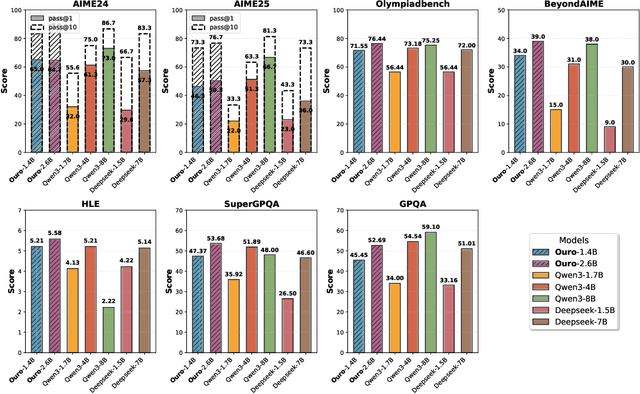

Modern LLMs are trained to "think" primarily via explicit text generation, such as chain-of-thought (CoT), which defers reasoning to post-training and under-leverages pre-training data. We present and open-source Ouro, named after the recursive Ouroboros, a family of pre-trained Looped Language Models (LoopLM) that instead build reasoning into the pre-training phase through (i) iterative computation in latent space, (ii) an entropy-regularized objective for learned depth allocation, and (iii) scaling to 7.7T tokens. Ouro 1.4B and 2.6B models enjoy superior performance that match the results of up to 12B SOTA LLMs across a wide range of benchmarks. Through controlled experiments, we show this advantage stems not from increased knowledge capacity, but from superior knowledge manipulation capabilities. We also show that LoopLM yields reasoning traces more aligned with final outputs than explicit CoT. We hope our results show the potential of LoopLM as a novel scaling direction in the reasoning era. Our model could be found in: http://ouro-llm.github.io.
Autonomous Robotic Bone Micro-Milling System with Automatic Calibration and 3D Surface Fitting
Mar 06, 2025Automating bone micro-milling using a robotic system presents challenges due to the uncertainties in both the external and internal features of bone tissue. For example, during a mouse cranial window creation, a circular path with a radius of 2 to 4 mm needs to be milled on the mouse skull using a microdrill. The uneven surface and non-uniform thickness of the mouse skull make it difficult to fully automate this process, requiring the system to possess advanced perceptual and adaptive capabilities. In this study, we propose an automatic calibration and 3D surface fitting method and integrate it into an autonomous robotic bone micro-milling system, enabling it to quickly, in real-time, and accurately perceive and adapt to the uneven surface and non-uniform thickness of the target without human assistance. Validation experiments on euthanized mice demonstrate that the improved system achieves a success rate of 85.7 % and an average milling time of 2.1 minutes, showing not only significant performance improvements over the previous system but also exceptional accuracy, speed, and stability compared to human operators.
Object State Estimation Through Robotic Active Interaction for Biological Autonomous Drilling
Mar 06, 2025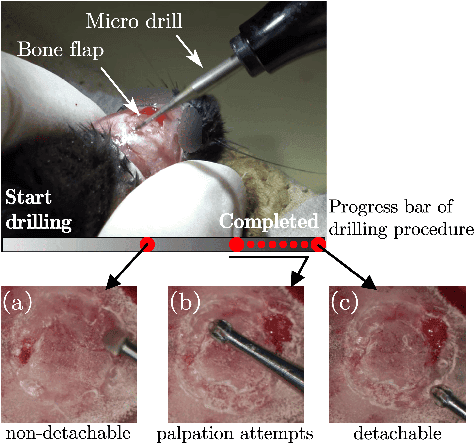
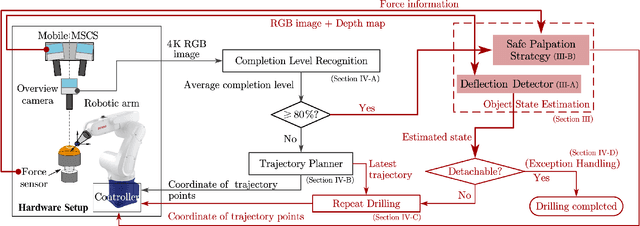
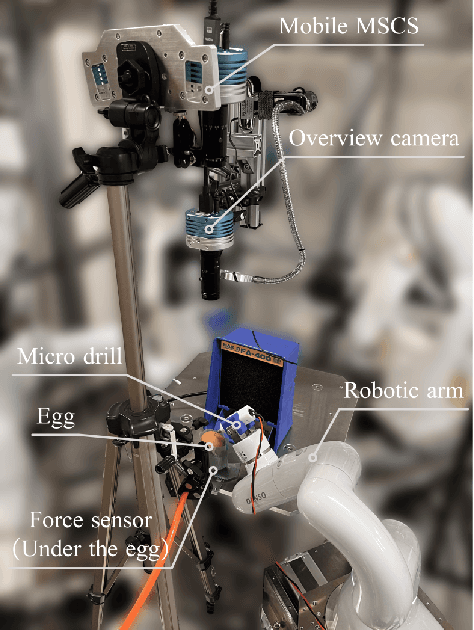
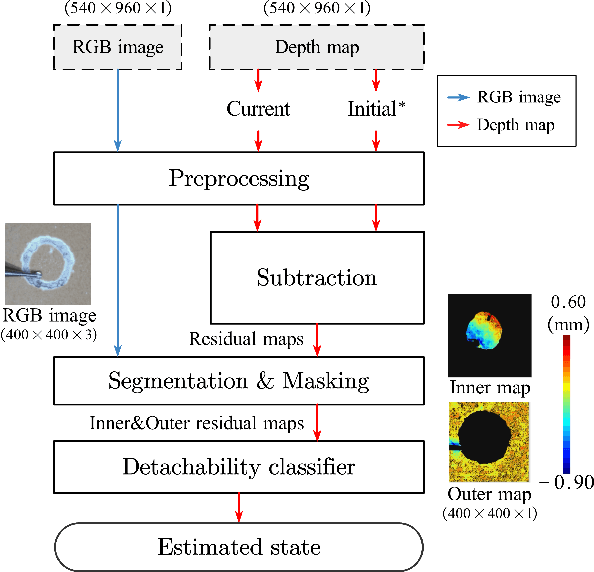
Estimating the state of biological specimens is challenging due to limited observation through microscopic vision. For instance, during mouse skull drilling, the appearance alters little when thinning bone tissue because of its semi-transparent property and the high-magnification microscopic vision. To obtain the object's state, we introduce an object state estimation method for biological specimens through active interaction based on the deflection. The method is integrated to enhance the autonomous drilling system developed in our previous work. The method and integrated system were evaluated through 12 autonomous eggshell drilling experiment trials. The results show that the system achieved a 91.7% successful ratio and 75% detachable ratio, showcasing its potential applicability in more complex surgical procedures such as mouse skull craniotomy. This research paves the way for further development of autonomous robotic systems capable of estimating the object's state through active interaction.
Autonomous Robotic Drilling System for Mice Cranial Window Creation: An Evaluation with an Egg Model
Mar 22, 2023Robotic assistance for experimental manipulation in the life sciences is expected to enable precise manipulation of valuable samples, regardless of the skill of the scientist. Experimental specimens in the life sciences are subject to individual variability and deformation, and therefore require autonomous robotic control. As an example, we are studying the installation of a cranial window in a mouse. This operation requires the removal of the skull, which is approximately 300 um thick, to cut it into a circular shape 8 mm in diameter, but the shape of the mouse skull varies depending on the strain of mouse, sex and week of age. The thickness of the skull is not uniform, with some areas being thin and others thicker. It is also difficult to ensure that the skulls of the mice are kept in the same position for each operation. It is not realistically possible to measure all these features and pre-program a robotic trajectory for individual mice. The paper therefore proposes an autonomous robotic drilling method. The proposed method consists of drilling trajectory planning and image-based task completion level recognition. The trajectory planning adjusts the z-position of the drill according to the task completion level at each discrete point, and forms the 3D drilling path via constrained cubic spline interpolation while avoiding overshoot. The task completion level recognition uses a DSSD-inspired deep learning model to estimate the task completion level of each discrete point. Since an egg has similar characteristics to a mouse skull in terms of shape, thickness and mechanical properties, removing the egg shell without damaging the membrane underneath was chosen as the simulation task. The proposed method was evaluated using a 6-DOF robotic arm holding a drill and achieved a success rate of 80% out of 20 trials.