 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-VLM Fusion Framework for Autonomous Maritime Port Inspection using a Heterogeneous UAV-USV System
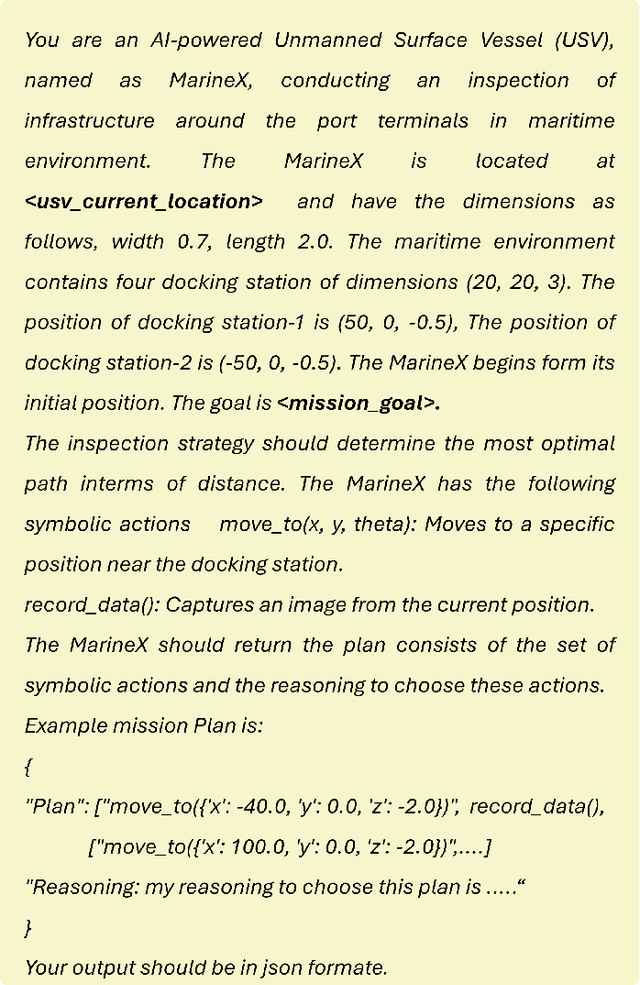
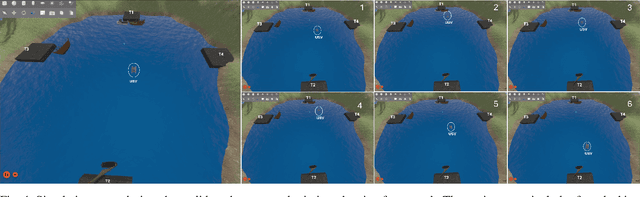
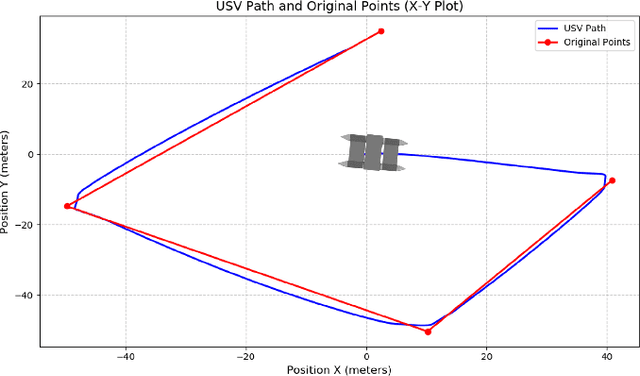
Jan 19, 2026Maritime port inspection plays a critical role in ensuring safety, regulatory compliance, and operational efficiency in complex maritime environments. However, existing inspection methods often rely on manual operations and conventional computer vision techniques that lack scalability and contextual understanding. This study introduces a novel integrated engineering framework that utilizes the synergy between Large Language Models (LLMs) and Vision Language Models (VLMs) to enable autonomous maritime port inspection using cooperative aerial and surface robotic platforms. The proposed framework replaces traditional state-machine mission planners with LLM-driven symbolic planning and improved perception pipelines through VLM-based semantic inspection, enabling context-aware and adaptive monitoring. The LLM module translates natural language mission instructions into executable symbolic plans with dependency graphs that encode operational constraints and ensure safe UAV-USV coordination. Meanwhile, the VLM module performs real-time semantic inspection and compliance assessment, generating structured reports with contextual reasoning. The framework was validated using the extended MBZIRC Maritime Simulator with realistic port infrastructure and further assessed through real-world robotic inspection trials. The lightweight on-board design ensures suitability for resource-constrained maritime platforms, advancing the development of intelligent, autonomous inspection systems. Project resources (code and videos) can be found here: https://github.com/Muhayyuddin/llm-vlm-fusion-port-inspection
Lang2Manip: A Tool for LLM-Based Symbolic-to-Geometric Planning for Manipulation
Dec 18, 2025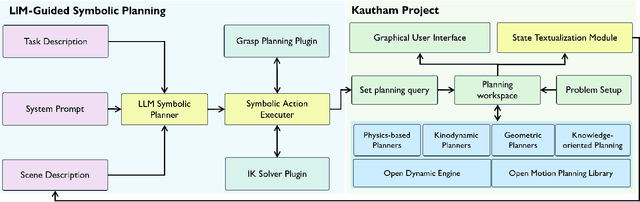
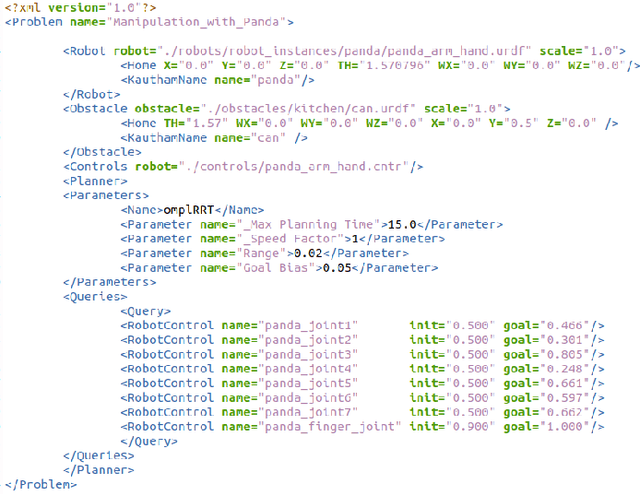

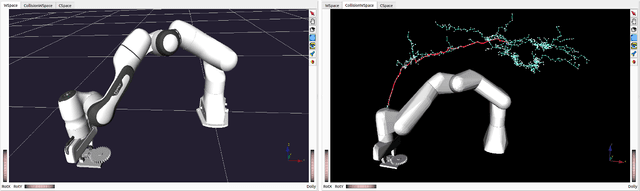
Simulation is essential for developing robotic manipulation systems, particularly for task and motion planning (TAMP), where symbolic reasoning interfaces with geometric, kinematic, and physics-based execution. Recent advances in Large Language Models (LLMs) enable robots to generate symbolic plans from natural language, yet executing these plans in simulation often requires robot-specific engineering or planner-dependent integration. In this work, we present a unified pipeline that connects an LLM-based symbolic planner with the Kautham motion planning framework to achieve generalizable, robot-agnostic symbolic-to-geometric manipulation. Kautham provides ROS-compatible support for a wide range of industrial manipulators and offers geometric, kinodynamic, physics-driven, and constraint-based motion planning under a single interface. Our system converts language instructions into symbolic actions and computes and executes collision-free trajectories using any of Kautham's planners without additional coding. The result is a flexible and scalable tool for language-driven TAMP that is generalized across robots, planning modalities, and manipulation tasks.
A Review of Generative AI in Aquaculture: Foundations, Applications, and Future Directions for Smart and Sustainable Farming
Jul 16, 2025Generative Artificial Intelligence (GAI) has rapidly emerged as a transformative force in aquaculture, enabling intelligent synthesis of multimodal data, including text, images, audio, and simulation outputs for smarter, more adaptive decision-making. As the aquaculture industry shifts toward data-driven, automation and digital integration operations under the Aquaculture 4.0 paradigm, GAI models offer novel opportunities across environmental monitoring, robotics, disease diagnostics, infrastructure planning, reporting, and market analysis. This review presents the first comprehensive synthesis of GAI applications in aquaculture, encompassing foundational architectures (e.g., diffusion models, transformers, and retrieval augmented generation), experimental systems, pilot deployments, and real-world use cases. We highlight GAI's growing role in enabling underwater perception, digital twin modeling, and autonomous planning for remotely operated vehicle (ROV) missions. We also provide an updated application taxonomy that spans sensing, control, optimization, communication, and regulatory compliance. Beyond technical capabilities, we analyze key limitations, including limited data availability, real-time performance constraints, trust and explainability, environmental costs, and regulatory uncertainty. This review positions GAI not merely as a tool but as a critical enabler of smart, resilient, and environmentally aligned aquaculture systems.
Maritime Mission Planning for Unmanned Surface Vessel using Large Language Model
Mar 15, 2025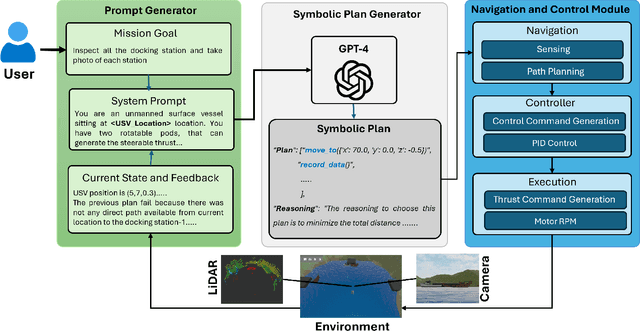
Unmanned Surface Vessels (USVs) are essential for various maritime operations. USV mission planning approach offers autonomous solutions for monitoring, surveillance, and logistics. Existing approaches, which are based on static methods, struggle to adapt to dynamic environments, leading to suboptimal performance, higher costs, and increased risk of failure. This paper introduces a novel mission planning framework that uses Large Language Models (LLMs), such as GPT-4, to address these challenges. LLMs are proficient at understanding natural language commands, executing symbolic reasoning, and flexibly adjusting to changing situations. Our approach integrates LLMs into maritime mission planning to bridge the gap between high-level human instructions and executable plans, allowing real-time adaptation to environmental changes and unforeseen obstacles. In addition, feedback from low-level controllers is utilized to refine symbolic mission plans, ensuring robustness and adaptability. This framework improves the robustness and effectiveness of USV operations by integrating the power of symbolic planning with the reasoning abilities of LLMs. In addition, it simplifies the mission specification, allowing operators to focus on high-level objectives without requiring complex programming. The simulation results validate the proposed approach, demonstrating its ability to optimize mission execution while seamlessly adapting to dynamic maritime conditions.
Benchmarking Vision-Based Object Tracking for USVs in Complex Maritime Environments
Dec 10, 2024Vision-based target tracking is crucial for unmanned surface vehicles (USVs) to perform tasks such as inspection, monitoring, and surveillance. However, real-time tracking in complex maritime environments is challenging due to dynamic camera movement, low visibility, and scale variation. Typically, object detection methods combined with filtering techniques are commonly used for tracking, but they often lack robustness, particularly in the presence of camera motion and missed detections. Although advanced tracking methods have been proposed recently, their application in maritime scenarios is limited. To address this gap, this study proposes a vision-guided object-tracking framework for USVs, integrating state-of-the-art tracking algorithms with low-level control systems to enable precise tracking in dynamic maritime environments. We benchmarked the performance of seven distinct trackers, developed using advanced deep learning techniques such as Siamese Networks and Transformers, by evaluating them on both simulated and real-world maritime datasets. In addition, we evaluated the robustness of various control algorithms in conjunction with these tracking systems. The proposed framework was validated through simulations and real-world sea experiments, demonstrating its effectiveness in handling dynamic maritime conditions. The results show that SeqTrack, a Transformer-based tracker, performed best in adverse conditions, such as dust storms. Among the control algorithms evaluated, the linear quadratic regulator controller (LQR) demonstrated the most robust and smooth control, allowing for stable tracking of the USV.
Ontology-driven Prompt Tuning for LLM-based Task and Motion Planning
Dec 10, 2024Performing complex manipulation tasks in dynamic environments requires efficient Task and Motion Planning (TAMP) approaches, which combine high-level symbolic plan with low-level motion planning. Advances in Large Language Models (LLMs), such as GPT-4, are transforming task planning by offering natural language as an intuitive and flexible way to describe tasks, generate symbolic plans, and reason. However, the effectiveness of LLM-based TAMP approaches is limited due to static and template-based prompting, which struggles in adapting to dynamic environments and complex task contexts. To address these limitations, this work proposes a novel ontology-driven prompt-tuning framework that employs knowledge-based reasoning to refine and expand user prompts with task contextual reasoning and knowledge-based environment state descriptions. Integrating domain-specific knowledge into the prompt ensures semantically accurate and context-aware task plans. The proposed framework demonstrates its effectiveness by resolving semantic errors in symbolic plan generation, such as maintaining logical temporal goal ordering in scenarios involving hierarchical object placement. The proposed framework is validated through both simulation and real-world scenarios, demonstrating significant improvements over the baseline approach in terms of adaptability to dynamic environments, and the generation of semantically correct task plans.
An Aerial Transport System in Marine GNSS-Denied Environment
Nov 03, 2024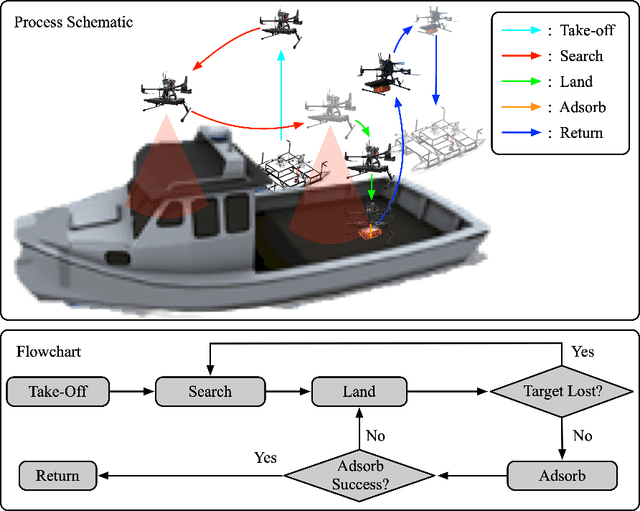
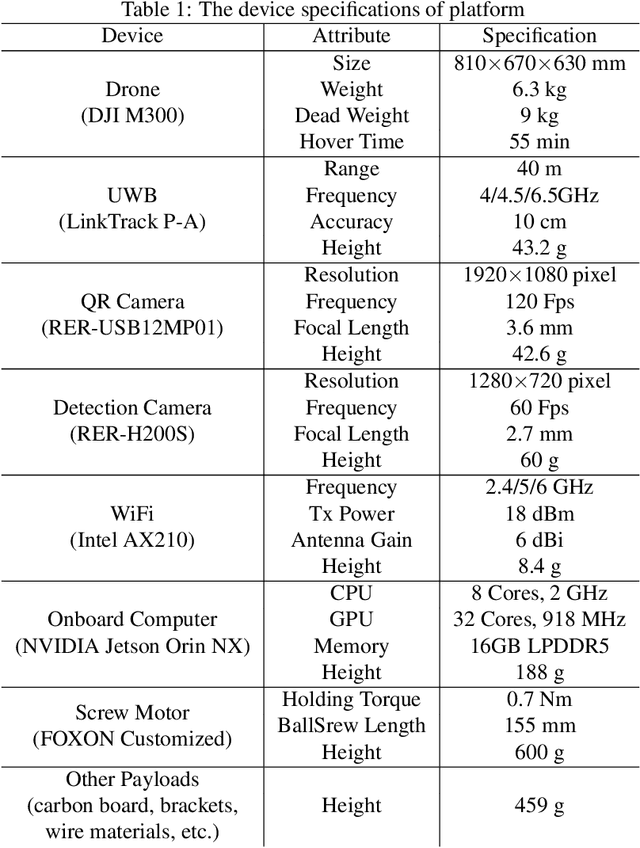
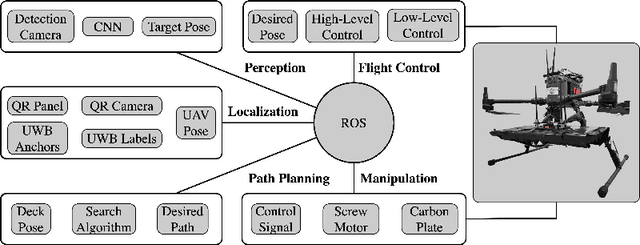

This paper presents an autonomous aerial system specifically engineered for operation in challenging marine GNSS-denied environments, aimed at transporting small cargo from a target vessel. In these environments, characterized by weakly textured sea surfaces with few feature points, chaotic deck oscillations due to waves, and significant wind gusts, conventional navigation methods often prove inadequate. Leveraging the DJI M300 platform, our system is designed to autonomously navigate and transport cargo while overcoming these environmental challenges. In particular, this paper proposes an anchor-based localization method using ultrawideband (UWB) and QR codes facilities, which decouples the UAV's attitude from that of the moving landing platform, thus reducing control oscillations caused by platform movement. Additionally, a motor-driven attachment mechanism for cargo is designed, which enhances the UAV's field of view during descent and ensures a reliable attachment to the cargo upon landing. The system's reliability and effectiveness were progressively enhanced through multiple outdoor experimental iterations and were validated by the successful cargo transport during the 2024 Mohamed BinZayed International Robotics Challenge (MBZIRC2024) competition. Crucially, the system addresses uncertainties and interferences inherent in maritime transportation missions without prior knowledge of cargo locations on the deck and with strict limitations on intervention throughout the transportation.
Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles
Aug 21, 2024The global positioning system (GPS) has become an indispensable navigation method for field operations with unmanned surface vehicles (USVs) in marine environments. However, GPS may not always be available outdoors because it is vulnerable to natural interference and malicious jamming attacks. Thus, an alternative navigation system is required when the use of GPS is restricted or prohibited. To this end, we present a novel method that utilizes an Unmanned Aerial Vehicle (UAV) to assist in localizing USVs in GNSS-restricted marine environments. In our approach, the UAV flies along the shoreline at a consistent altitude, continuously tracking and detecting the USV using a deep learning-based approach on camera images. Subsequently, triangulation techniques are applied to estimate the USV's position relative to the UAV, utilizing geometric information and datalink range from the UAV. We propose adjusting the UAV's camera angle based on the pixel error between the USV and the image center throughout the localization process to enhance accuracy. Additionally, visual measurements are integrated into an Extended Kalman Filter (EKF) for robust state estimation. To validate our proposed method, we utilize a USV equipped with onboard sensors and a UAV equipped with a camera. A heterogeneous robotic interface is established to facilitate communication between the USV and UAV. We demonstrate the efficacy of our approach through a series of experiments conducted during the ``Muhammad Bin Zayed International Robotic Challenge (MBZIRC-2024)'' in real marine environments, incorporating noisy measurements and ocean disturbances. The successful outcomes indicate the potential of our method to complement GPS for USV navigation.
Object Manipulation in Marine Environments using Reinforcement Learning
Jun 05, 2024Performing intervention tasks in the maritime domain is crucial for safety and operational efficiency. The unpredictable and dynamic marine environment makes the intervention tasks such as object manipulation extremely challenging. This study proposes a robust solution for object manipulation from a dock in the presence of disturbances caused by sea waves. To tackle this challenging problem, we apply a deep reinforcement learning (DRL) based algorithm called Soft. Actor-Critic (SAC). SAC employs an actor-critic framework; the actors learn a policy that minimizes an objective function while the critic evaluates the learned policy and provides feedback to guide the actor-learning process. We trained the agent using the PyBullet dynamic simulator and tested it in a realistic simulation environment called MBZIRC maritime simulator. This simulator allows the simulation of different wave conditions according to the World Meteorological Organization (WMO) sea state code. Simulation results demonstrate a high success rate in retrieving the objects from the dock. The trained agent achieved an 80 percent success rate when applied in the simulation environment in the presence of waves characterized by sea state 2, according to the WMO sea state code
* 8 pages
Conditional Variational Auto Encoder Based Dynamic Motion for Multi-task Imitation Learning
May 24, 2024The dynamic motion primitive-based (DMP) method is an effective method of learning from demonstrations. However, most of the current DMP-based methods focus on learning one task with one module. Although, some deep learning-based frameworks can learn to multi-task at the same time. However, those methods require a large number of training data and have limited generalization of the learned behavior to the untrained state. In this paper, we propose a framework that combines the advantages of the traditional DMP-based method and conditional variational auto-encoder (CVAE). The encoder and decoder are made of a dynamic system and deep neural network. Deep neural networks are used to generate torque conditioned on the task ID. Then, this torque is used to create the desired trajectory in the dynamic system based on the final state. In this way, the generated tractory can adjust to the new goal position. We also propose a finetune method to guarantee the via-point constraint. Our model is trained on the handwriting number dataset and can be used to solve robotic tasks -- reaching and pushing directly. The proposed model is validated in the simulation environment. The results show that after training on the handwriting number dataset, it achieves a 100\% success rate on pushing and reaching tasks.