 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynchronized Online Friction Estimation and Adaptive Grasp Control for Robust Gentle Grasp
Feb 02, 2026We introduce a unified framework for gentle robotic grasping that synergistically couples real-time friction estimation with adaptive grasp control. We propose a new particle filter-based method for real-time estimation of the friction coefficient using vision-based tactile sensors. This estimate is seamlessly integrated into a reactive controller that dynamically modulates grasp force to maintain a stable grip. The two processes operate synchronously in a closed-loop: the controller uses the current best estimate to adjust the force, while new tactile feedback from this action continuously refines the estimation. This creates a highly responsive and robust sensorimotor cycle. The reliability and efficiency of the complete framework are validated through extensive robotic experiments.
An Aerial Transport System in Marine GNSS-Denied Environment
Nov 03, 2024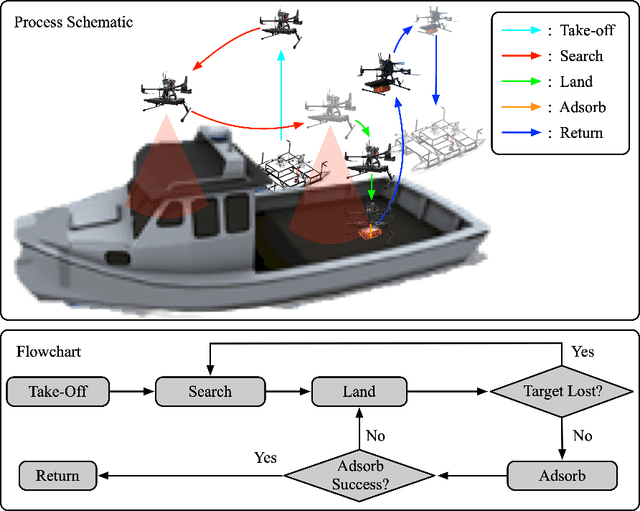
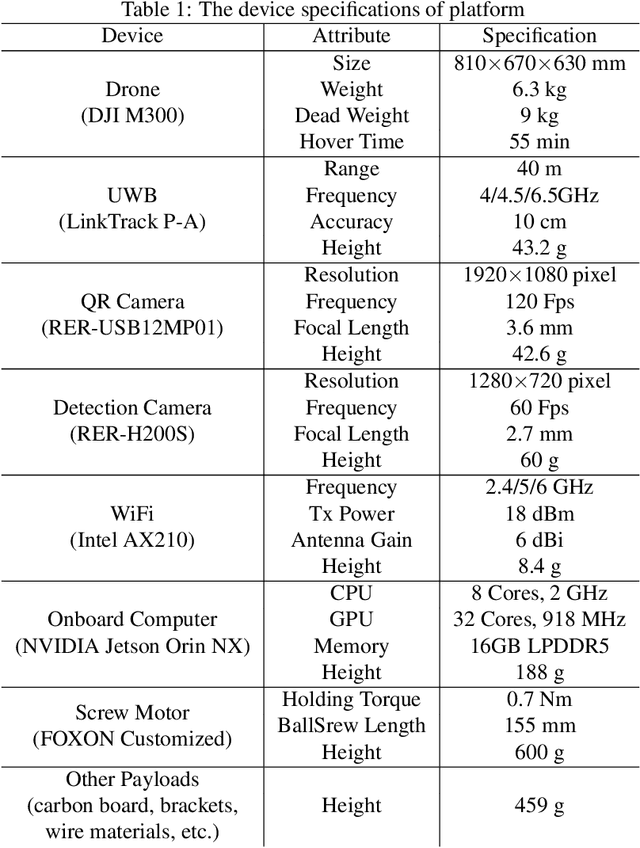
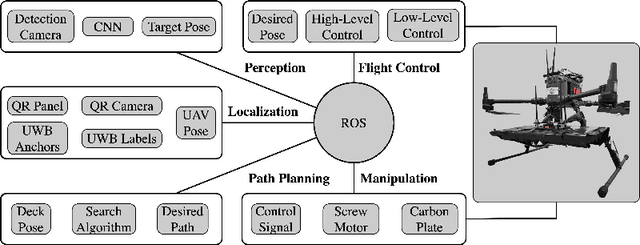

This paper presents an autonomous aerial system specifically engineered for operation in challenging marine GNSS-denied environments, aimed at transporting small cargo from a target vessel. In these environments, characterized by weakly textured sea surfaces with few feature points, chaotic deck oscillations due to waves, and significant wind gusts, conventional navigation methods often prove inadequate. Leveraging the DJI M300 platform, our system is designed to autonomously navigate and transport cargo while overcoming these environmental challenges. In particular, this paper proposes an anchor-based localization method using ultrawideband (UWB) and QR codes facilities, which decouples the UAV's attitude from that of the moving landing platform, thus reducing control oscillations caused by platform movement. Additionally, a motor-driven attachment mechanism for cargo is designed, which enhances the UAV's field of view during descent and ensures a reliable attachment to the cargo upon landing. The system's reliability and effectiveness were progressively enhanced through multiple outdoor experimental iterations and were validated by the successful cargo transport during the 2024 Mohamed BinZayed International Robotics Challenge (MBZIRC2024) competition. Crucially, the system addresses uncertainties and interferences inherent in maritime transportation missions without prior knowledge of cargo locations on the deck and with strict limitations on intervention throughout the transportation.
ADOD: Adaptive Domain-Aware Object Detection with Residual Attention for Underwater Environments
Dec 11, 2023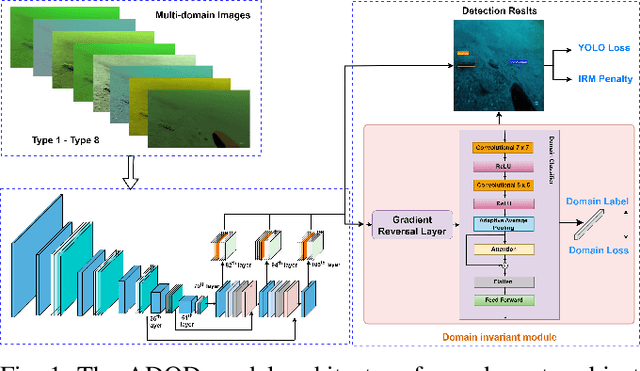
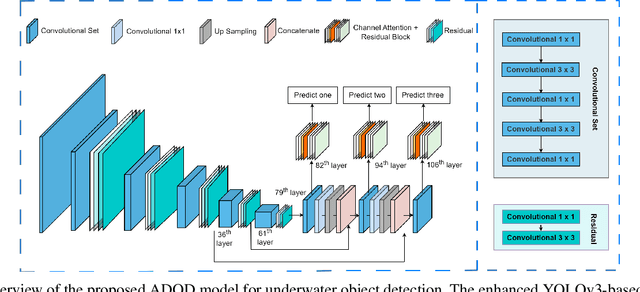
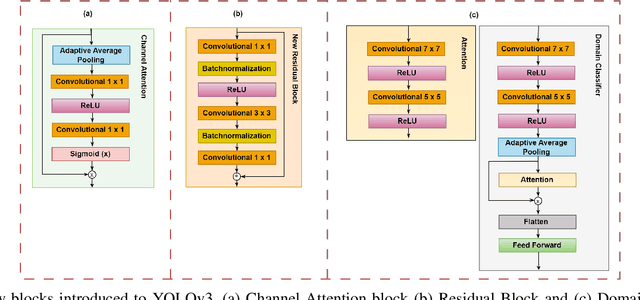
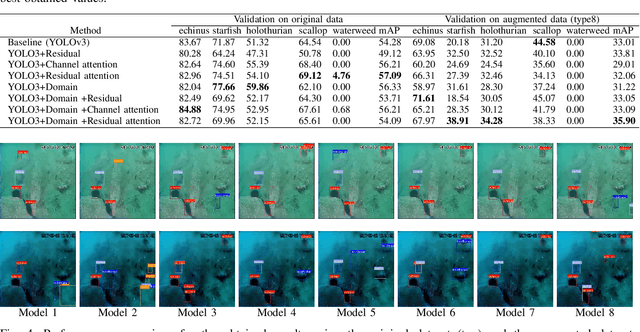
This research presents ADOD, a novel approach to address domain generalization in underwater object detection. Our method enhances the model's ability to generalize across diverse and unseen domains, ensuring robustness in various underwater environments. The first key contribution is Residual Attention YOLOv3, a novel variant of the YOLOv3 framework empowered by residual attention modules. These modules enable the model to focus on informative features while suppressing background noise, leading to improved detection accuracy and adaptability to different domains. The second contribution is the attention-based domain classification module, vital during training. This module helps the model identify domain-specific information, facilitating the learning of domain-invariant features. Consequently, ADOD can generalize effectively to underwater environments with distinct visual characteristics. Extensive experiments on diverse underwater datasets demonstrate ADOD's superior performance compared to state-of-the-art domain generalization methods, particularly in challenging scenarios. The proposed model achieves exceptional detection performance in both seen and unseen domains, showcasing its effectiveness in handling domain shifts in underwater object detection tasks. ADOD represents a significant advancement in adaptive object detection, providing a promising solution for real-world applications in underwater environments. With the prevalence of domain shifts in such settings, the model's strong generalization ability becomes a valuable asset for practical underwater surveillance and marine research endeavors.
Robust Collision Detection for Robots with Variable Stiffness Actuation by Using MAD-CNN: Modularized-Attention-Dilated Convolutional Neural Network
Oct 04, 2023Ensuring safety is paramount in the field of collaborative robotics to mitigate the risks of human injury and environmental damage. Apart from collision avoidance, it is crucial for robots to rapidly detect and respond to unexpected collisions. While several learning-based collision detection methods have been introduced as alternatives to purely model-based detection techniques, there is currently a lack of such methods designed for collaborative robots equipped with variable stiffness actuators. Moreover, there is potential for further enhancing the network's robustness and improving the efficiency of data training. In this paper, we propose a new network, the Modularized Attention-Dilated Convolutional Neural Network (MAD-CNN), for collision detection in robots equipped with variable stiffness actuators. Our model incorporates a dual inductive bias mechanism and an attention module to enhance data efficiency and improve robustness. In particular, MAD-CNN is trained using only a four-minute collision dataset focusing on the highest level of joint stiffness. Despite limited training data, MAD-CNN robustly detects all collisions with minimal detection delay across various stiffness conditions. Moreover, it exhibits a higher level of collision sensitivity, which is beneficial for effectively handling false positives, which is a common issue in learning-based methods. Experimental results demonstrate that the proposed MAD-CNN model outperforms existing state-of-the-art models in terms of collision sensitivity and robustness.
Novel Supernumerary Robotic Limb based on Variable Stiffness Actuators for Hemiplegic Patients Assistance
Aug 06, 2022Loss of upper extremity motor control and function is an unremitting symptom in post-stroke patients. This would impose hardships on accomplishing their daily life activities. Supernumerary robotic limbs (SRLs) were introduced as a solution to regain the lost Degrees of Freedom (DoFs) by introducing an independent new limb. The actuation systems in SRL can be categorized into rigid and soft actuators. Soft actuators have proven advantageous over their rigid counterparts through intrinsic safety, cost, and energy efficiency. However, they suffer from low stiffness, which jeopardizes their accuracy. Variable Stiffness Actuators (VSAs) are newly developed technologies that have been proven to ensure accuracy and safety. In this paper, we introduce the novel Supernumerary Robotic Limb based on Variable Stiffness Actuators. Based on our knowledge, the proposed proof-of-concept SRL is the first that utilizes Variable Stiffness Actuators. The developed SRL would assist post-stroke patients in bi-manual tasks, e.g., eating with a fork and knife. The modeling, design, and realization of the system are illustrated. The proposed SRL was evaluated and verified for its accuracy via predefined trajectories. The safety was verified by utilizing the momentum observer for collision detection, and several post-collision reaction strategies were evaluated through the Soft Tissue Injury Test. The assistance process is qualitatively verified through standard user-satisfaction questionnaire.