 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Aerial Transport System in Marine GNSS-Denied Environment
Nov 03, 2024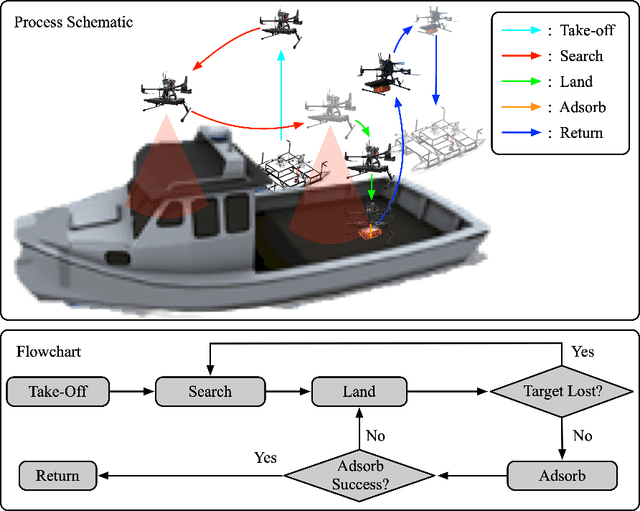
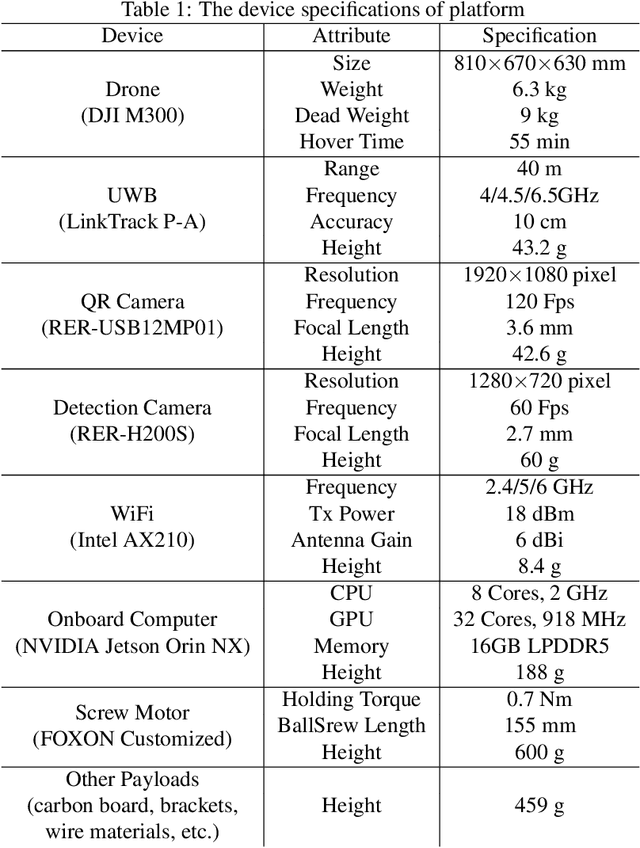
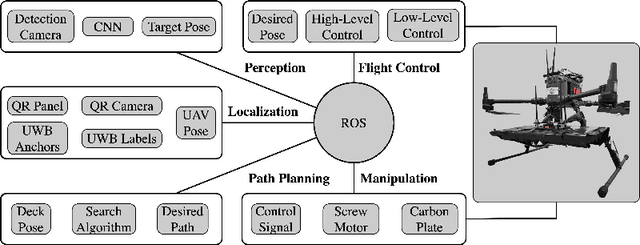

This paper presents an autonomous aerial system specifically engineered for operation in challenging marine GNSS-denied environments, aimed at transporting small cargo from a target vessel. In these environments, characterized by weakly textured sea surfaces with few feature points, chaotic deck oscillations due to waves, and significant wind gusts, conventional navigation methods often prove inadequate. Leveraging the DJI M300 platform, our system is designed to autonomously navigate and transport cargo while overcoming these environmental challenges. In particular, this paper proposes an anchor-based localization method using ultrawideband (UWB) and QR codes facilities, which decouples the UAV's attitude from that of the moving landing platform, thus reducing control oscillations caused by platform movement. Additionally, a motor-driven attachment mechanism for cargo is designed, which enhances the UAV's field of view during descent and ensures a reliable attachment to the cargo upon landing. The system's reliability and effectiveness were progressively enhanced through multiple outdoor experimental iterations and were validated by the successful cargo transport during the 2024 Mohamed BinZayed International Robotics Challenge (MBZIRC2024) competition. Crucially, the system addresses uncertainties and interferences inherent in maritime transportation missions without prior knowledge of cargo locations on the deck and with strict limitations on intervention throughout the transportation.
Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles
Aug 21, 2024The global positioning system (GPS) has become an indispensable navigation method for field operations with unmanned surface vehicles (USVs) in marine environments. However, GPS may not always be available outdoors because it is vulnerable to natural interference and malicious jamming attacks. Thus, an alternative navigation system is required when the use of GPS is restricted or prohibited. To this end, we present a novel method that utilizes an Unmanned Aerial Vehicle (UAV) to assist in localizing USVs in GNSS-restricted marine environments. In our approach, the UAV flies along the shoreline at a consistent altitude, continuously tracking and detecting the USV using a deep learning-based approach on camera images. Subsequently, triangulation techniques are applied to estimate the USV's position relative to the UAV, utilizing geometric information and datalink range from the UAV. We propose adjusting the UAV's camera angle based on the pixel error between the USV and the image center throughout the localization process to enhance accuracy. Additionally, visual measurements are integrated into an Extended Kalman Filter (EKF) for robust state estimation. To validate our proposed method, we utilize a USV equipped with onboard sensors and a UAV equipped with a camera. A heterogeneous robotic interface is established to facilitate communication between the USV and UAV. We demonstrate the efficacy of our approach through a series of experiments conducted during the ``Muhammad Bin Zayed International Robotic Challenge (MBZIRC-2024)'' in real marine environments, incorporating noisy measurements and ocean disturbances. The successful outcomes indicate the potential of our method to complement GPS for USV navigation.
MuLA-GAN: Multi-Level Attention GAN for Enhanced Underwater Visibility
Dec 25, 2023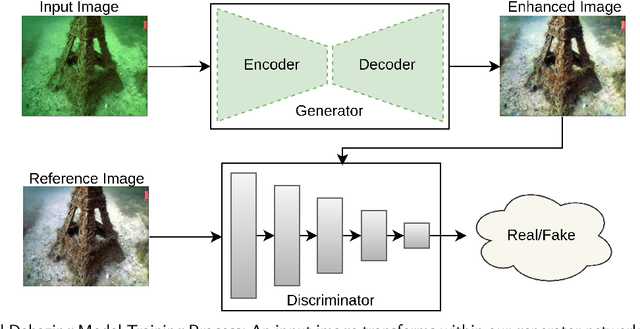


The underwater environment presents unique challenges, including color distortions, reduced contrast, and blurriness, hindering accurate analysis. In this work, we introduce MuLA-GAN, a novel approach that leverages the synergistic power of Generative Adversarial Networks (GANs) and Multi-Level Attention mechanisms for comprehensive underwater image enhancement. The integration of Multi-Level Attention within the GAN architecture significantly enhances the model's capacity to learn discriminative features crucial for precise image restoration. By selectively focusing on relevant spatial and multi-level features, our model excels in capturing and preserving intricate details in underwater imagery, essential for various applications. Extensive qualitative and quantitative analyses on diverse datasets, including UIEB test dataset, UIEB challenge dataset, U45, and UCCS dataset, highlight the superior performance of MuLA-GAN compared to existing state-of-the-art methods. Experimental evaluations on a specialized dataset tailored for bio-fouling and aquaculture applications demonstrate the model's robustness in challenging environmental conditions. On the UIEB test dataset, MuLA-GAN achieves exceptional PSNR (25.59) and SSIM (0.893) scores, surpassing Water-Net, the second-best model, with scores of 24.36 and 0.885, respectively. This work not only addresses a significant research gap in underwater image enhancement but also underscores the pivotal role of Multi-Level Attention in enhancing GANs, providing a novel and comprehensive framework for restoring underwater image quality.
Vision-Based Autonomous Navigation for Unmanned Surface Vessel in Extreme Marine Conditions
Aug 08, 2023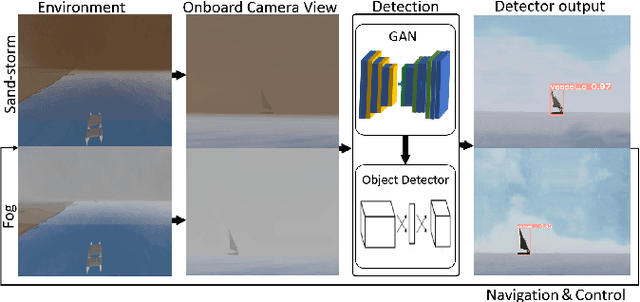
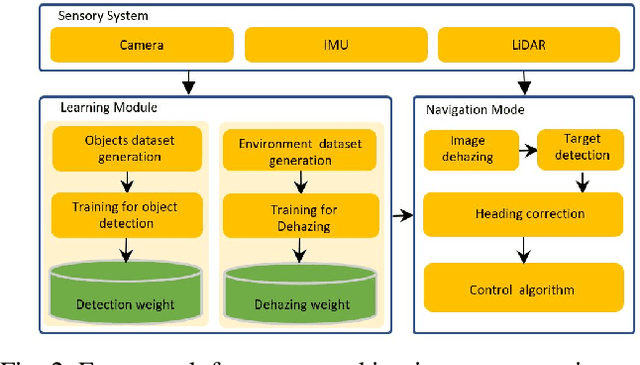
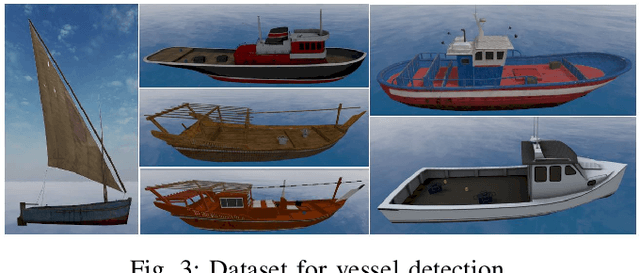
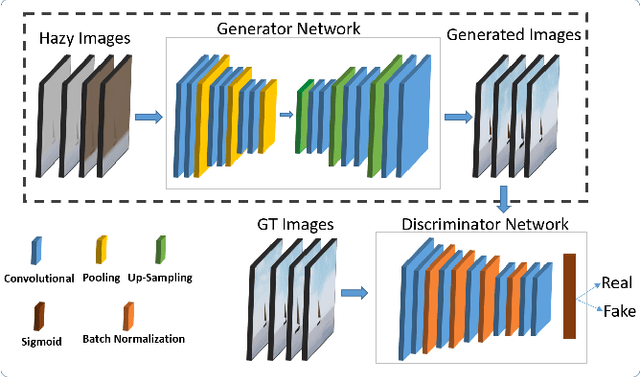
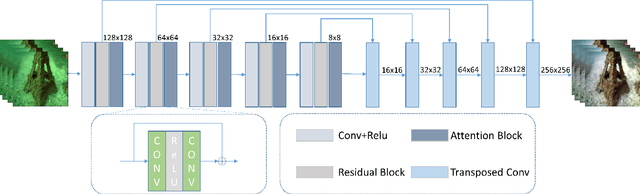
Visual perception is an important component for autonomous navigation of unmanned surface vessels (USV), particularly for the tasks related to autonomous inspection and tracking. These tasks involve vision-based navigation techniques to identify the target for navigation. Reduced visibility under extreme weather conditions in marine environments makes it difficult for vision-based approaches to work properly. To overcome these issues, this paper presents an autonomous vision-based navigation framework for tracking target objects in extreme marine conditions. The proposed framework consists of an integrated perception pipeline that uses a generative adversarial network (GAN) to remove noise and highlight the object features before passing them to the object detector (i.e., YOLOv5). The detected visual features are then used by the USV to track the target. The proposed framework has been thoroughly tested in simulation under extremely reduced visibility due to sandstorms and fog. The results are compared with state-of-the-art de-hazing methods across the benchmarked MBZIRC simulation dataset, on which the proposed scheme has outperformed the existing methods across various metrics.