 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuLA-GAN: Multi-Level Attention GAN for Enhanced Underwater Visibility
Dec 25, 2023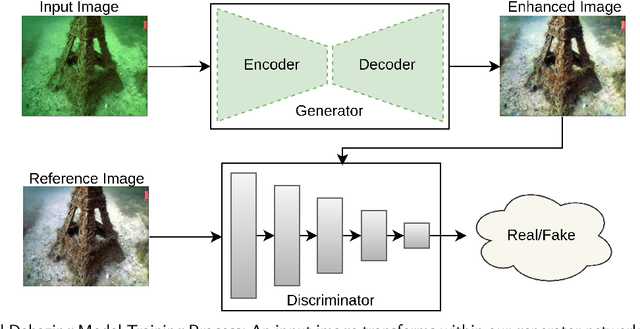

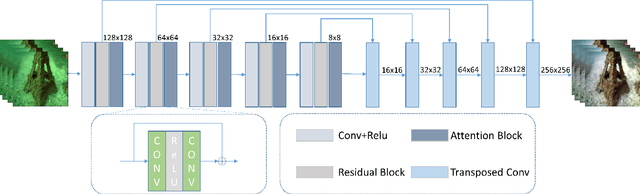

The underwater environment presents unique challenges, including color distortions, reduced contrast, and blurriness, hindering accurate analysis. In this work, we introduce MuLA-GAN, a novel approach that leverages the synergistic power of Generative Adversarial Networks (GANs) and Multi-Level Attention mechanisms for comprehensive underwater image enhancement. The integration of Multi-Level Attention within the GAN architecture significantly enhances the model's capacity to learn discriminative features crucial for precise image restoration. By selectively focusing on relevant spatial and multi-level features, our model excels in capturing and preserving intricate details in underwater imagery, essential for various applications. Extensive qualitative and quantitative analyses on diverse datasets, including UIEB test dataset, UIEB challenge dataset, U45, and UCCS dataset, highlight the superior performance of MuLA-GAN compared to existing state-of-the-art methods. Experimental evaluations on a specialized dataset tailored for bio-fouling and aquaculture applications demonstrate the model's robustness in challenging environmental conditions. On the UIEB test dataset, MuLA-GAN achieves exceptional PSNR (25.59) and SSIM (0.893) scores, surpassing Water-Net, the second-best model, with scores of 24.36 and 0.885, respectively. This work not only addresses a significant research gap in underwater image enhancement but also underscores the pivotal role of Multi-Level Attention in enhancing GANs, providing a novel and comprehensive framework for restoring underwater image quality.
Vision-Based Autonomous Navigation for Unmanned Surface Vessel in Extreme Marine Conditions
Aug 08, 2023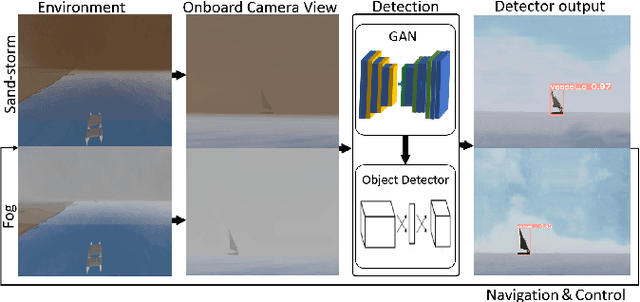
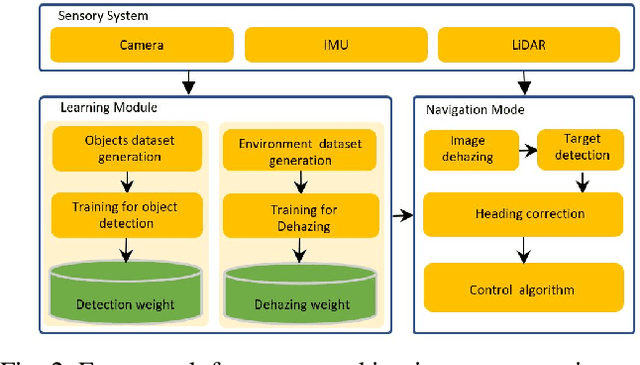
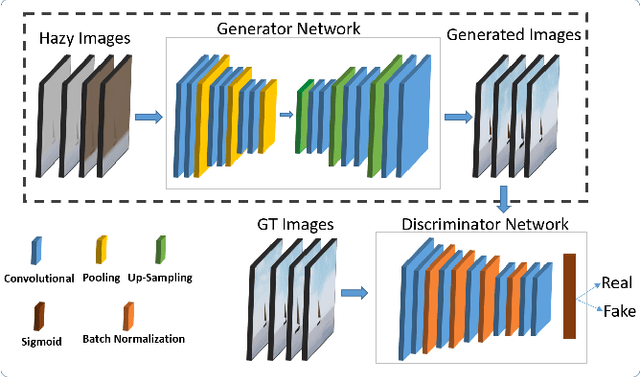
Visual perception is an important component for autonomous navigation of unmanned surface vessels (USV), particularly for the tasks related to autonomous inspection and tracking. These tasks involve vision-based navigation techniques to identify the target for navigation. Reduced visibility under extreme weather conditions in marine environments makes it difficult for vision-based approaches to work properly. To overcome these issues, this paper presents an autonomous vision-based navigation framework for tracking target objects in extreme marine conditions. The proposed framework consists of an integrated perception pipeline that uses a generative adversarial network (GAN) to remove noise and highlight the object features before passing them to the object detector (i.e., YOLOv5). The detected visual features are then used by the USV to track the target. The proposed framework has been thoroughly tested in simulation under extremely reduced visibility due to sandstorms and fog. The results are compared with state-of-the-art de-hazing methods across the benchmarked MBZIRC simulation dataset, on which the proposed scheme has outperformed the existing methods across various metrics.