 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaritime Mission Planning for Unmanned Surface Vessel using Large Language Model
Paper and Code
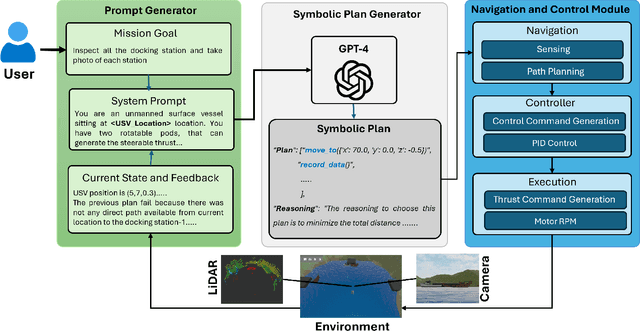
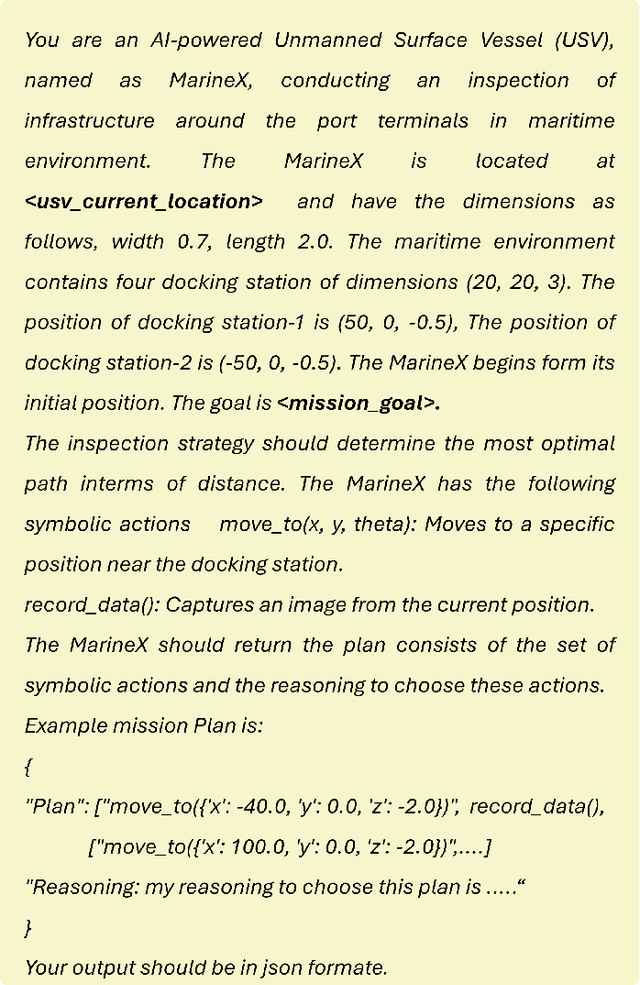
Unmanned Surface Vessels (USVs) are essential for various maritime operations. USV mission planning approach offers autonomous solutions for monitoring, surveillance, and logistics. Existing approaches, which are based on static methods, struggle to adapt to dynamic environments, leading to suboptimal performance, higher costs, and increased risk of failure. This paper introduces a novel mission planning framework that uses Large Language Models (LLMs), such as GPT-4, to address these challenges. LLMs are proficient at understanding natural language commands, executing symbolic reasoning, and flexibly adjusting to changing situations. Our approach integrates LLMs into maritime mission planning to bridge the gap between high-level human instructions and executable plans, allowing real-time adaptation to environmental changes and unforeseen obstacles. In addition, feedback from low-level controllers is utilized to refine symbolic mission plans, ensuring robustness and adaptability. This framework improves the robustness and effectiveness of USV operations by integrating the power of symbolic planning with the reasoning abilities of LLMs. In addition, it simplifies the mission specification, allowing operators to focus on high-level objectives without requiring complex programming. The simulation results validate the proposed approach, demonstrating its ability to optimize mission execution while seamlessly adapting to dynamic maritime conditions.