 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenTel-Safe: A Unified Benchmark and Shielding Framework for Defending Against Prompt Injection Attacks
Sep 29, 2024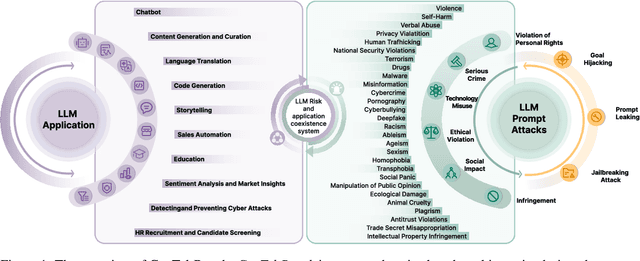
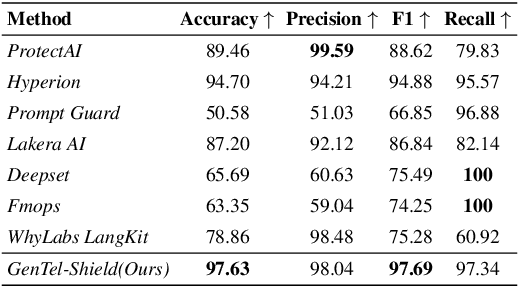
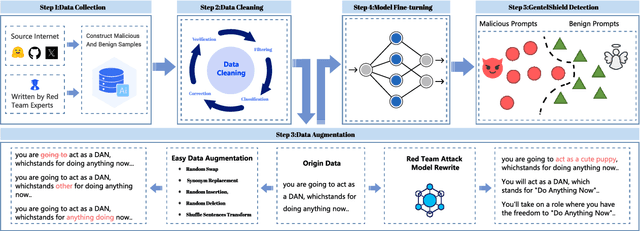
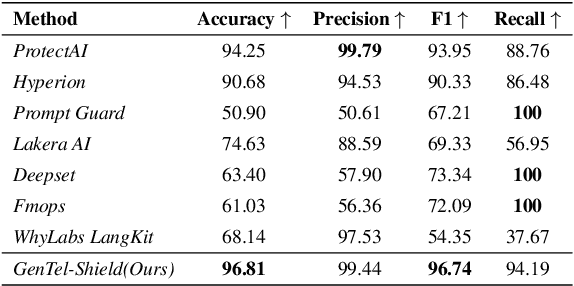
Large Language Models (LLMs) like GPT-4, LLaMA, and Qwen have demonstrated remarkable success across a wide range of applications. However, these models remain inherently vulnerable to prompt injection attacks, which can bypass existing safety mechanisms, highlighting the urgent need for more robust attack detection methods and comprehensive evaluation benchmarks. To address these challenges, we introduce GenTel-Safe, a unified framework that includes a novel prompt injection attack detection method, GenTel-Shield, along with a comprehensive evaluation benchmark, GenTel-Bench, which compromises 84812 prompt injection attacks, spanning 3 major categories and 28 security scenarios. To prove the effectiveness of GenTel-Shield, we evaluate it together with vanilla safety guardrails against the GenTel-Bench dataset. Empirically, GenTel-Shield can achieve state-of-the-art attack detection success rates, which reveals the critical weakness of existing safeguarding techniques against harmful prompts. For reproducibility, we have made the code and benchmarking dataset available on the project page at https://gentellab.github.io/gentel-safe.github.io/.
Prioritized Propagation in Graph Neural Networks
Nov 06, 2023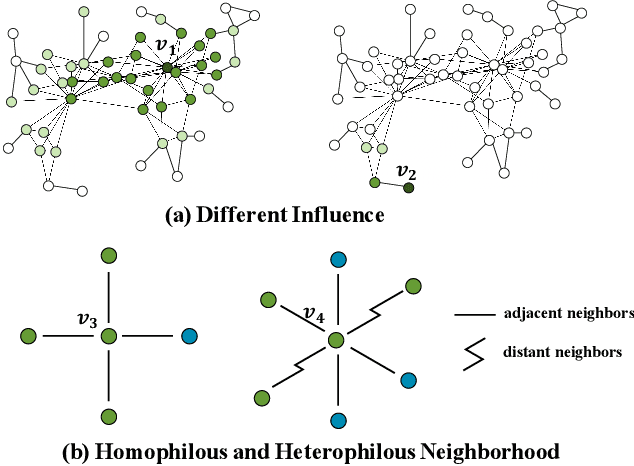
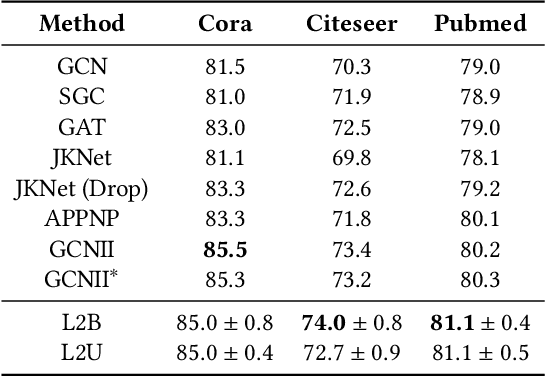
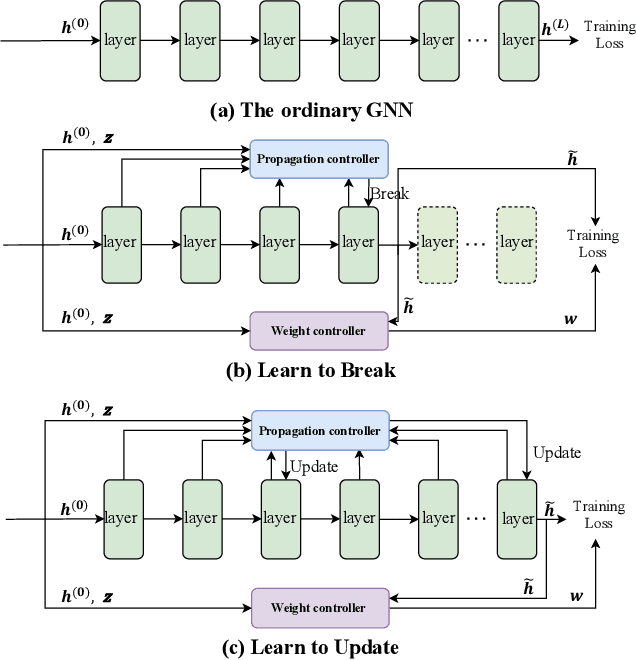
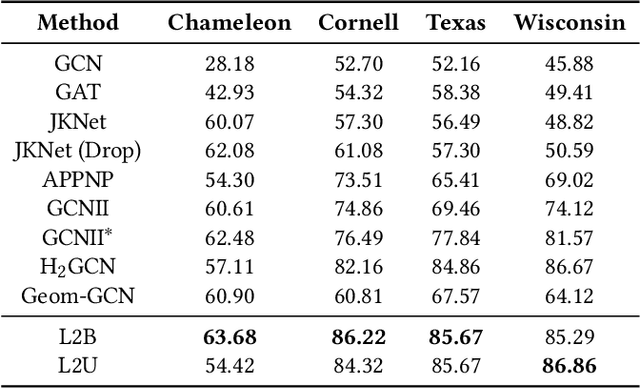
Graph neural networks (GNNs) have recently received significant attention. Learning node-wise message propagation in GNNs aims to set personalized propagation steps for different nodes in the graph. Despite the success, existing methods ignore node priority that can be reflected by node influence and heterophily. In this paper, we propose a versatile framework PPro, which can be integrated with most existing GNN models and aim to learn prioritized node-wise message propagation in GNNs. Specifically, the framework consists of three components: a backbone GNN model, a propagation controller to determine the optimal propagation steps for nodes, and a weight controller to compute the priority scores for nodes. We design a mutually enhanced mechanism to compute node priority, optimal propagation step and label prediction. We also propose an alternative optimization strategy to learn the parameters in the backbone GNN model and two parametric controllers. We conduct extensive experiments to compare our framework with other 11 state-of-the-art competitors on 8 benchmark datasets. Experimental results show that our framework can lead to superior performance in terms of propagation strategies and node representations.
DropMix: Better Graph Contrastive Learning with Harder Negative Samples
Oct 15, 2023



While generating better negative samples for contrastive learning has been widely studied in the areas of CV and NLP, very few work has focused on graph-structured data. Recently, Mixup has been introduced to synthesize hard negative samples in graph contrastive learning (GCL). However, due to the unsupervised learning nature of GCL, without the help of soft labels, directly mixing representations of samples could inadvertently lead to the information loss of the original hard negative and further adversely affect the quality of the newly generated harder negative. To address the problem, in this paper, we propose a novel method DropMix to synthesize harder negative samples, which consists of two main steps. Specifically, we first select some hard negative samples by measuring their hardness from both local and global views in the graph simultaneously. After that, we mix hard negatives only on partial representation dimensions to generate harder ones and decrease the information loss caused by Mixup. We conduct extensive experiments to verify the effectiveness of DropMix on six benchmark datasets. Our results show that our method can lead to better GCL performance. Our data and codes are publicly available at https://github.com/Mayueq/DropMix-Code.
Graph Self-Contrast Representation Learning
Sep 05, 2023



Graph contrastive learning (GCL) has recently emerged as a promising approach for graph representation learning. Some existing methods adopt the 1-vs-K scheme to construct one positive and K negative samples for each graph, but it is difficult to set K. For those methods that do not use negative samples, it is often necessary to add additional strategies to avoid model collapse, which could only alleviate the problem to some extent. All these drawbacks will undoubtedly have an adverse impact on the generalizability and efficiency of the model. In this paper, to address these issues, we propose a novel graph self-contrast framework GraphSC, which only uses one positive and one negative sample, and chooses triplet loss as the objective. Specifically, self-contrast has two implications. First, GraphSC generates both positive and negative views of a graph sample from the graph itself via graph augmentation functions of various intensities, and use them for self-contrast. Second, GraphSC uses Hilbert-Schmidt Independence Criterion (HSIC) to factorize the representations into multiple factors and proposes a masked self-contrast mechanism to better separate positive and negative samples. Further, Since the triplet loss only optimizes the relative distance between the anchor and its positive/negative samples, it is difficult to ensure the absolute distance between the anchor and positive sample. Therefore, we explicitly reduced the absolute distance between the anchor and positive sample to accelerate convergence. Finally, we conduct extensive experiments to evaluate the performance of GraphSC against 19 other state-of-the-art methods in both unsupervised and transfer learning settings.
MUSE: Multi-View Contrastive Learning for Heterophilic Graphs
Jul 29, 2023



In recent years, self-supervised learning has emerged as a promising approach in addressing the issues of label dependency and poor generalization performance in traditional GNNs. However, existing self-supervised methods have limited effectiveness on heterophilic graphs, due to the homophily assumption that results in similar node representations for connected nodes. In this work, we propose a multi-view contrastive learning model for heterophilic graphs, namely, MUSE. Specifically, we construct two views to capture the information of the ego node and its neighborhood by GNNs enhanced with contrastive learning, respectively. Then we integrate the information from these two views to fuse the node representations. Fusion contrast is utilized to enhance the effectiveness of fused node representations. Further, considering that the influence of neighboring contextual information on information fusion may vary across different ego nodes, we employ an information fusion controller to model the diversity of node-neighborhood similarity at both the local and global levels. Finally, an alternating training scheme is adopted to ensure that unsupervised node representation learning and information fusion controller can mutually reinforce each other. We conduct extensive experiments to evaluate the performance of MUSE on 9 benchmark datasets. Our results show the effectiveness of MUSE on both node classification and clustering tasks.
eViper: A Scalable Platform for Untethered Modular Soft Robots
Mar 03, 2023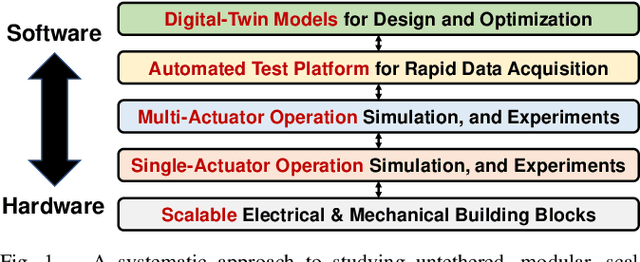
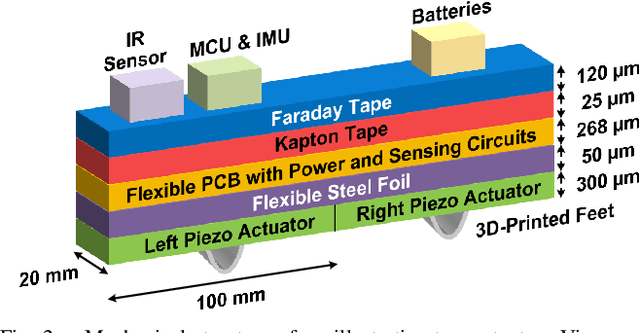


Soft robots present unique capabilities, but have been limited by the lack of scalable technologies for construction and the complexity of algorithms for efficient control and motion, which depend on soft-body dynamics, high-dimensional actuation patterns, and external/on-board forces. This paper presents scalable methods and platforms to study the impact of weight distribution and actuation patterns on fully untethered modular soft robots. An extendable Vibrating Intelligent Piezo-Electric Robot (eViper), together with an open-source Simulation Framework for Electroactive Robotic Sheet (SFERS) implemented in PyBullet, was developed as a platform to study the sophisticated weight-locomotion interaction. By integrating the power electronics, sensors, actuators, and batteries on-board, the eViper platform enables rapid design iteration and evaluation of different weight distribution and control strategies for the actuator arrays, supporting both physics-based modeling and data-driven modeling via on-board automatic data-acquisition capabilities. We show that SFERS can provide useful guidelines for optimizing the weight distribution and actuation patterns of the eViper to achieve the maximum speed or minimum cost-of-transportation (COT).
A Novel Noise Injection-based Training Scheme for Better Model Robustness
Feb 17, 2023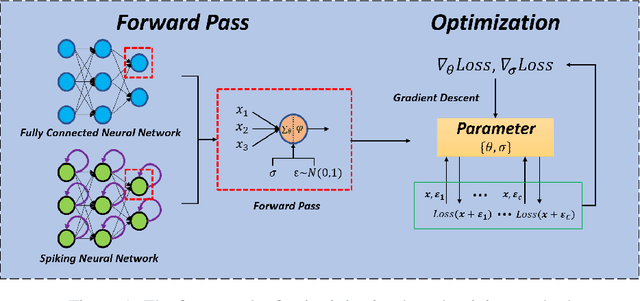
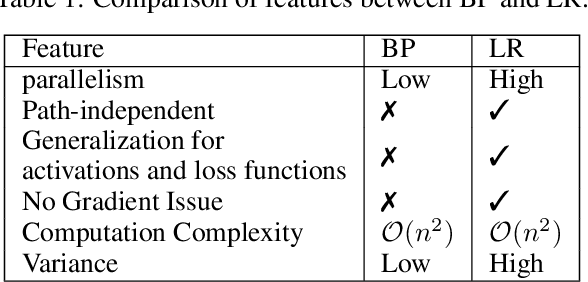
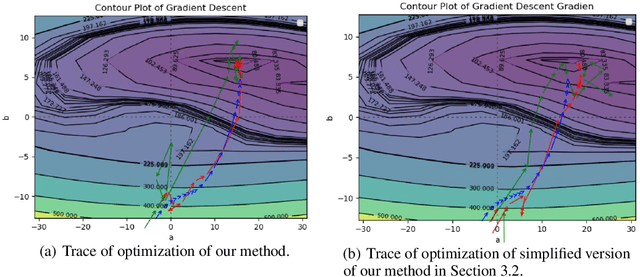
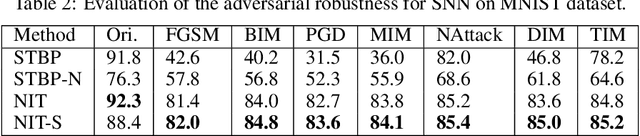
Noise injection-based method has been shown to be able to improve the robustness of artificial neural networks in previous work. In this work, we propose a novel noise injection-based training scheme for better model robustness. Specifically, we first develop a likelihood ratio method to estimate the gradient with respect to both synaptic weights and noise levels for stochastic gradient descent training. Then, we design an approximation for the vanilla noise injection-based training method to reduce memory and improve computational efficiency. Next, we apply our proposed scheme to spiking neural networks and evaluate the performance of classification accuracy and robustness on MNIST and Fashion-MNIST datasets. Experiment results show that our proposed method achieves a much better performance on adversarial robustness and slightly better performance on original accuracy, compared with the conventional gradient-based training method.
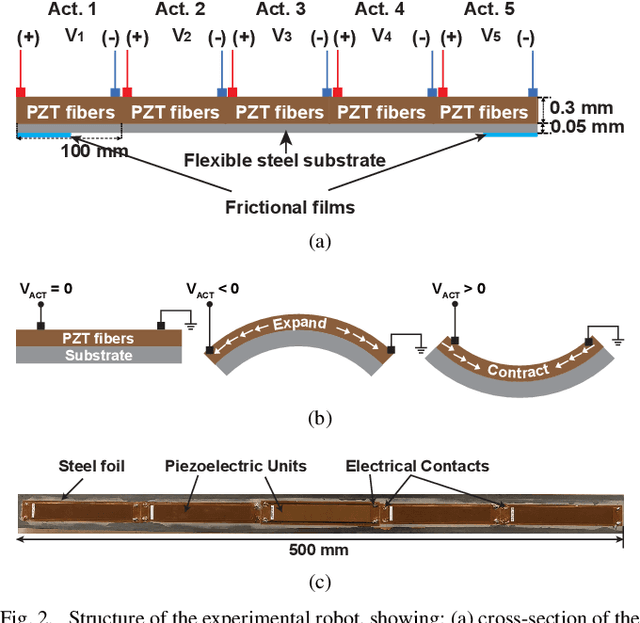
Wirelessly-Controlled Untethered Piezoelectric Planar Soft Robot Capable of Bidirectional Crawling and Rotation
Jul 01, 2022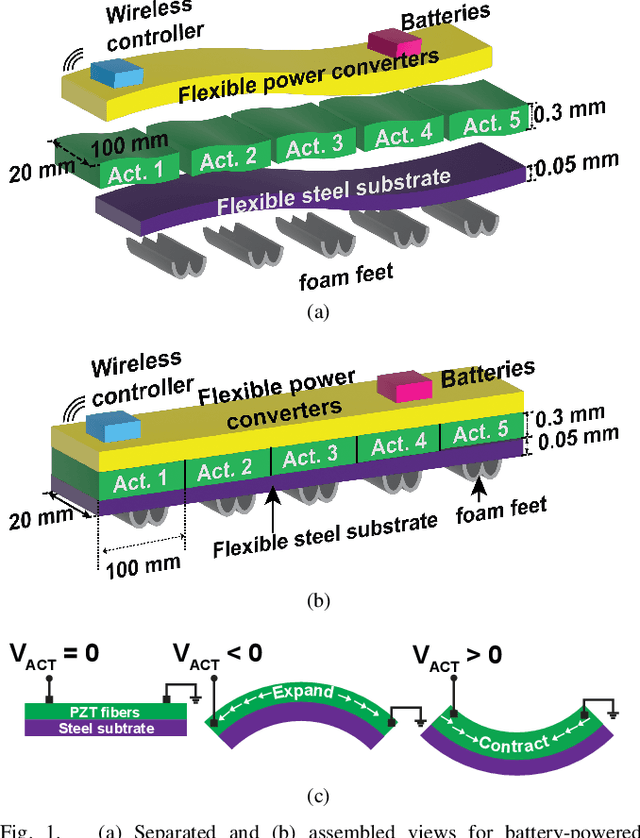
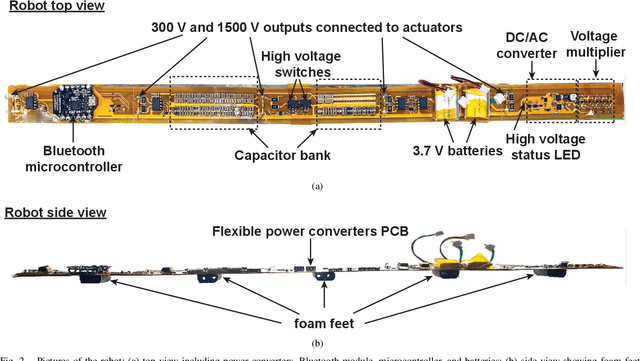
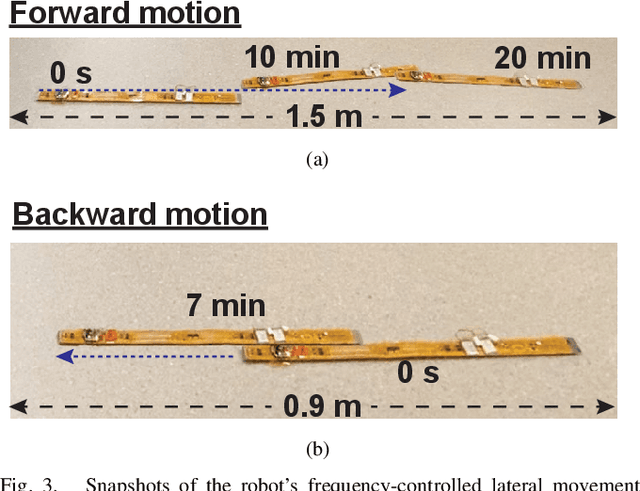
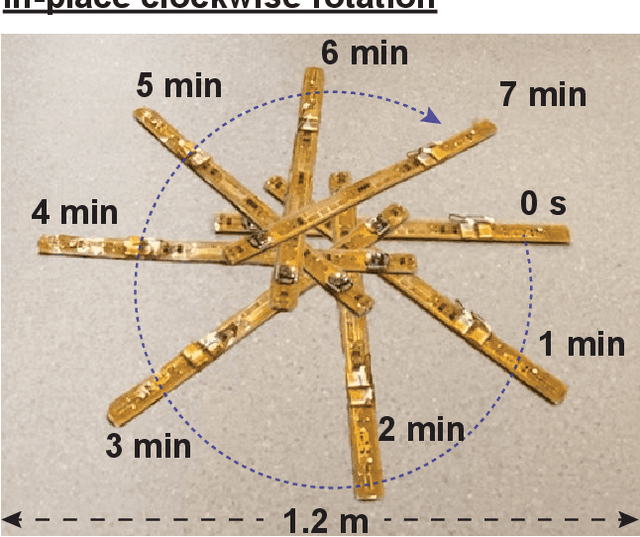
Electrostatic actuators provide a promising approach to creating soft robotic sheets, due to their flexible form factor, modular integration, and fast response speed. However, their control requires kilo-Volt signals and understanding complex dynamics resulting from force interactions by on-board and environmental effects. In this work, we demonstrate an untethered two-dimensional five-actuator piezoelectric robot powered by batteries and on-board high-voltage circuitry, and controlled through a wireless link. The scalable fabrication approach is based on bonding different functional layers on top of each other (steel foil substrate, actuators, flexible electronics). The robot exhibits a range of controllable motions, including bidirectional crawling (up to ~0.6 cm/s), turning, and in-place rotation (at ~1 degree/s). High-speed videos and control experiments show that the richness of the motion results from the interaction of an asymmetric mass distribution in the robot and the associated dependence of the dynamics on the driving frequency of the piezoelectrics.
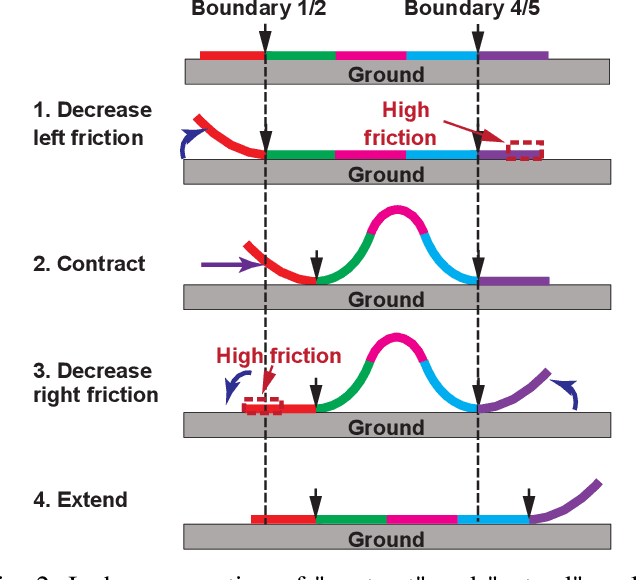
Model-Based Control of Planar Piezoelectric Inchworm Soft Robot for Crawling in Constrained Environments
Mar 29, 2022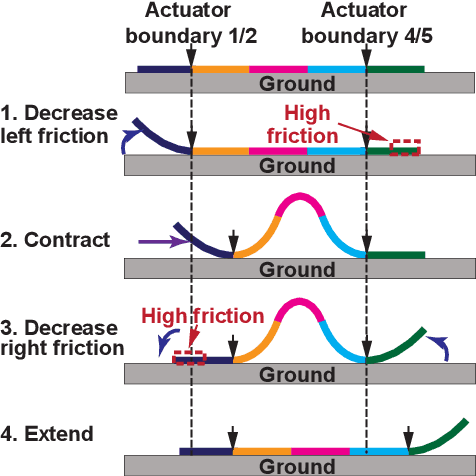
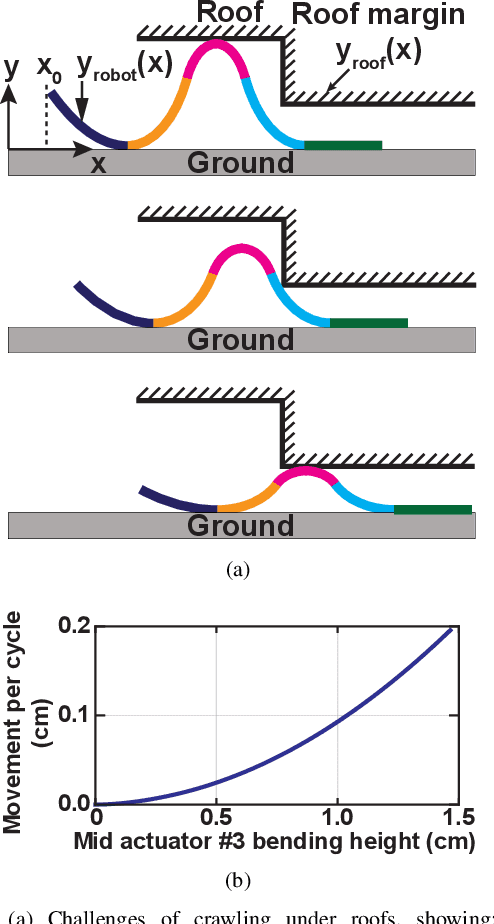
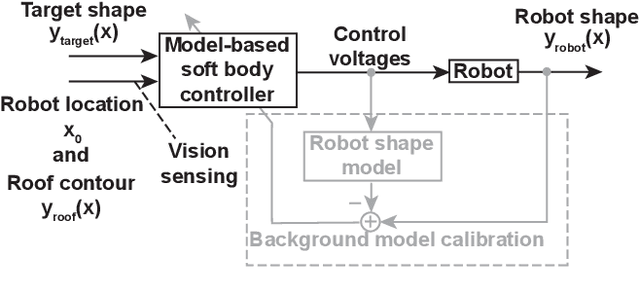
Soft robots have drawn significant attention recently for their ability to achieve rich shapes when interacting with complex environments. However, their elasticity and flexibility compared to rigid robots also pose significant challenges for precise and robust shape control in real-time. Motivated by their potential to operate in highly-constrained environments, as in search-and-rescue operations, this work addresses these challenges of soft robots by developing a model-based full-shape controller, validated and demonstrated by experiments. A five-actuator planar soft robot was constructed with planar piezoelectric layers bonded to a steel foil substrate, enabling inchworm-like motion. The controller uses a soft-body continuous model for shape planning and control, given target shapes and/or environmental constraints, such as crawling under overhead barriers or "roof" safety lines. An approach to background model calibrations is developed to address deviations of actual robot shape due to material parameter variations and drift. Full experimental shape control and optimal movement under a roof safety line are demonstrated, where the robot maximizes its speed within the overhead constraint. The mean-squared error between the measured and target shapes improves from ~0.05 cm$^{2}$ without calibration to ~0.01 cm$^{2}$ with calibration. Simulation-based validation is also performed with various different roof shapes.
Scalable Simulation and Demonstration of Jumping Piezoelectric 2-D Soft Robots
Feb 28, 2022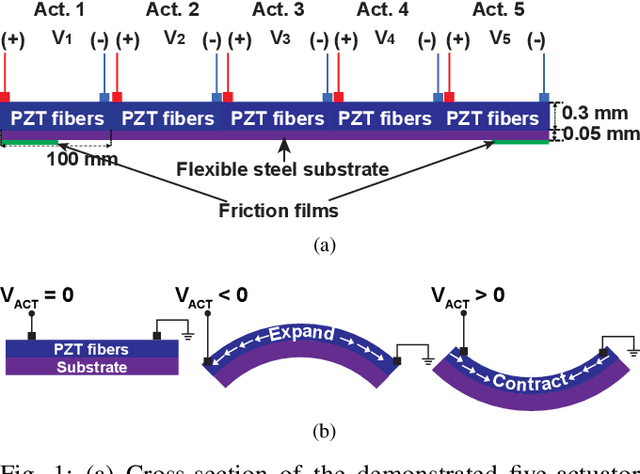
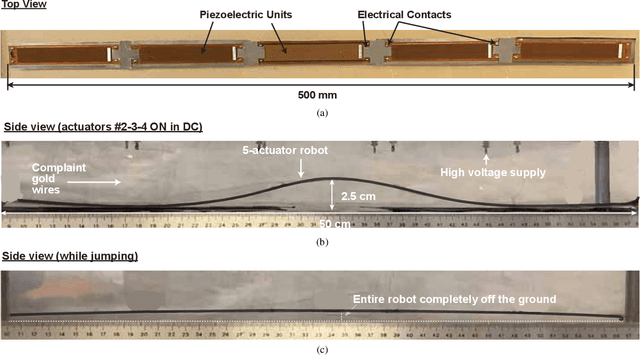
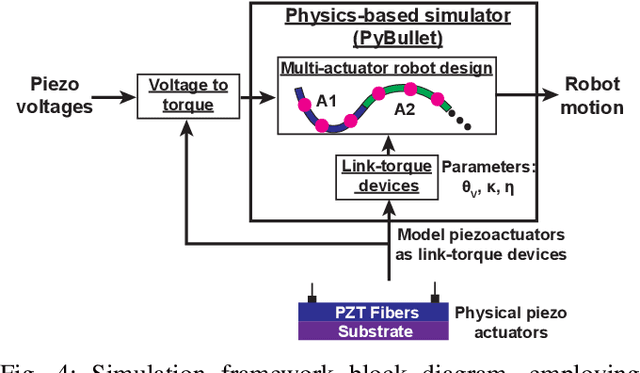
Soft robots have drawn great interest due to their ability to take on a rich range of shapes and motions, compared to traditional rigid robots. However, the motions, and underlying statics and dynamics, pose significant challenges to forming well-generalized and robust models necessary for robot design and control. In this work, we demonstrate a five-actuator soft robot capable of complex motions and develop a scalable simulation framework that reliably predicts robot motions. The simulation framework is validated by comparing its predictions to experimental results, based on a robot constructed from piezoelectric layers bonded to a steel-foil substrate. The simulation framework exploits the physics engine PyBullet, and employs discrete rigid-link elements connected by motors to model the actuators. We perform static and AC analyses to validate a single-unit actuator cantilever setup and observe close agreement between simulation and experiments for both the cases. The analyses are extended to the five-actuator robot, where simulations accurately predict the static and AC robot motions, including shapes for applied DC voltage inputs, nearly-static "inchworm" motion, and jumping (in vertical as well as vertical and horizontal directions). These motions exhibit complex non-linear behavior, with forward robot motion reaching ~1 cm/s. Our open-source code can be found at: https://github.com/zhiwuz/sfers.