 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeeViper: A Scalable Platform for Untethered Modular Soft Robots
Mar 03, 2023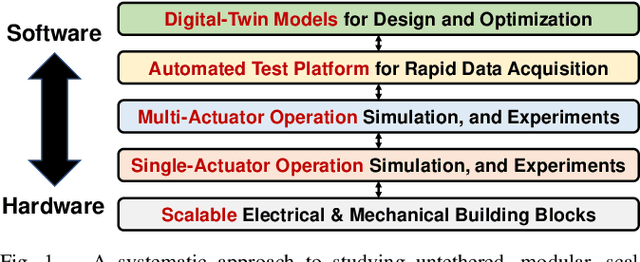
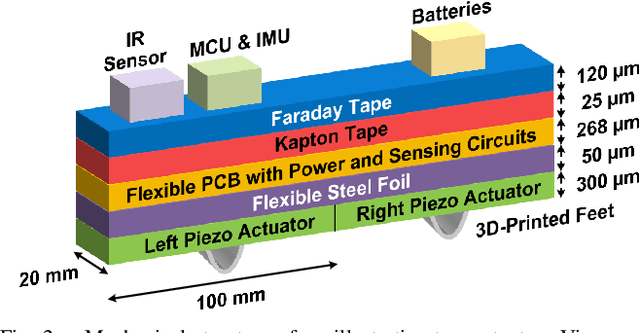


Soft robots present unique capabilities, but have been limited by the lack of scalable technologies for construction and the complexity of algorithms for efficient control and motion, which depend on soft-body dynamics, high-dimensional actuation patterns, and external/on-board forces. This paper presents scalable methods and platforms to study the impact of weight distribution and actuation patterns on fully untethered modular soft robots. An extendable Vibrating Intelligent Piezo-Electric Robot (eViper), together with an open-source Simulation Framework for Electroactive Robotic Sheet (SFERS) implemented in PyBullet, was developed as a platform to study the sophisticated weight-locomotion interaction. By integrating the power electronics, sensors, actuators, and batteries on-board, the eViper platform enables rapid design iteration and evaluation of different weight distribution and control strategies for the actuator arrays, supporting both physics-based modeling and data-driven modeling via on-board automatic data-acquisition capabilities. We show that SFERS can provide useful guidelines for optimizing the weight distribution and actuation patterns of the eViper to achieve the maximum speed or minimum cost-of-transportation (COT).