 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFireRisk: A Remote Sensing Dataset for Fire Risk Assessment with Benchmarks Using Supervised and Self-supervised Learning
Mar 13, 2023



In recent decades, wildfires, as widespread and extremely destructive natural disasters, have caused tremendous property losses and fatalities, as well as extensive damage to forest ecosystems. Many fire risk assessment projects have been proposed to prevent wildfires, but GIS-based methods are inherently challenging to scale to different geographic areas due to variations in data collection and local conditions. Inspired by the abundance of publicly available remote sensing projects and the burgeoning development of deep learning in computer vision, our research focuses on assessing fire risk using remote sensing imagery. In this work, we propose a novel remote sensing dataset, FireRisk, consisting of 7 fire risk classes with a total of 91872 labelled images for fire risk assessment. This remote sensing dataset is labelled with the fire risk classes supplied by the Wildfire Hazard Potential (WHP) raster dataset, and remote sensing images are collected using the National Agriculture Imagery Program (NAIP), a high-resolution remote sensing imagery program. On FireRisk, we present benchmark performance for supervised and self-supervised representations, with Masked Autoencoders (MAE) pre-trained on ImageNet1k achieving the highest classification accuracy, 65.29%. This remote sensing dataset, FireRisk, provides a new direction for fire risk assessment, and we make it publicly available on https://github.com/CharmonyShen/FireRisk.
DINO-MC: Self-supervised Contrastive Learning for Remote Sensing Imagery with Multi-sized Local Crops
Mar 12, 2023



Due to the costly nature of remote sensing image labeling and the large volume of available unlabeled imagery, self-supervised methods that can learn feature representations without manual annotation have received great attention. While prior works have explored self-supervised learning in remote sensing tasks, pretext tasks based on local-global view alignment remain underexplored. Inspired by DINO, which employs an effective representation learning structure with knowledge distillation based on global-local view alignment, we formulate two pretext tasks for use in self-supervised learning on remote sensing imagery (SSLRS). Using these tasks, we explore the effectiveness of positive temporal contrast as well as multi-sized views on SSLRS. Moreover, we extend DINO and propose DINO-MC which uses local views of various sized crops instead of a single fixed size. Our experiments demonstrate that even when pre-trained on only 10% of the dataset, DINO-MC performs on par or better than existing state of the art SSLRS methods on multiple remote sensing tasks, while using less computational resources. All codes, models and results are available at https://github.com/WennyXY/DINO-MC.
Reproducibility and Baseline Reporting for Dynamic Multi-objective Benchmark Problems
Apr 08, 2022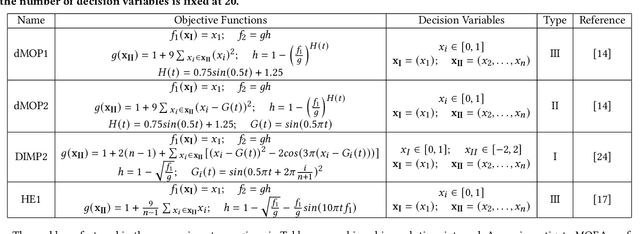

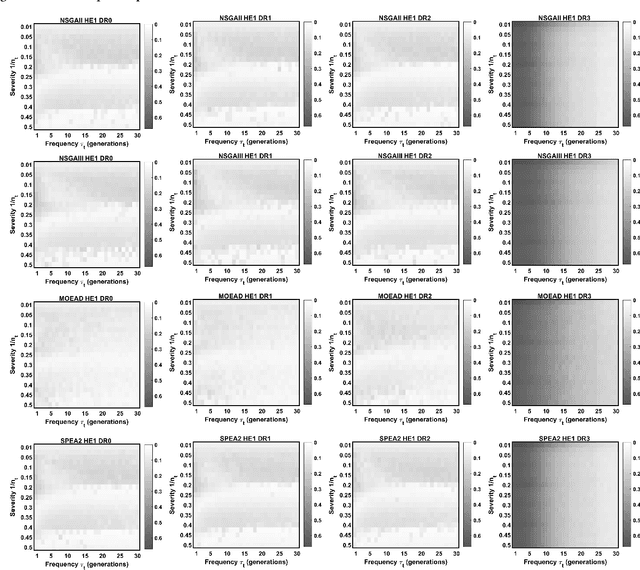

Dynamic multi-objective optimization problems (DMOPs) are widely accepted to be more challenging than stationary problems due to the time-dependent nature of the objective functions and/or constraints. Evaluation of purpose-built algorithms for DMOPs is often performed on narrow selections of dynamic instances with differing change magnitude and frequency or a limited selection of problems. In this paper, we focus on the reproducibility of simulation experiments for parameters of DMOPs. Our framework is based on an extension of PlatEMO, allowing for the reproduction of results and performance measurements across a range of dynamic settings and problems. A baseline schema for dynamic algorithm evaluation is introduced, which provides a mechanism to interrogate performance and optimization behaviours of well-known evolutionary algorithms that were not designed specifically for DMOPs. Importantly, by determining the maximum capability of non-dynamic multi-objective evolutionary algorithms, we can establish the minimum capability required of purpose-built dynamic algorithms to be useful. The simplest modifications to manage dynamic changes introduce diversity. Allowing non-dynamic algorithms to incorporate mutated/random solutions after change events determines the improvement possible with minor algorithm modifications. Future expansion to include current dynamic algorithms will enable reproduction of their results and verification of their abilities and performance across DMOP benchmark space.
An Instance Space Analysis of Constrained Multi-Objective Optimization Problems
Mar 02, 2022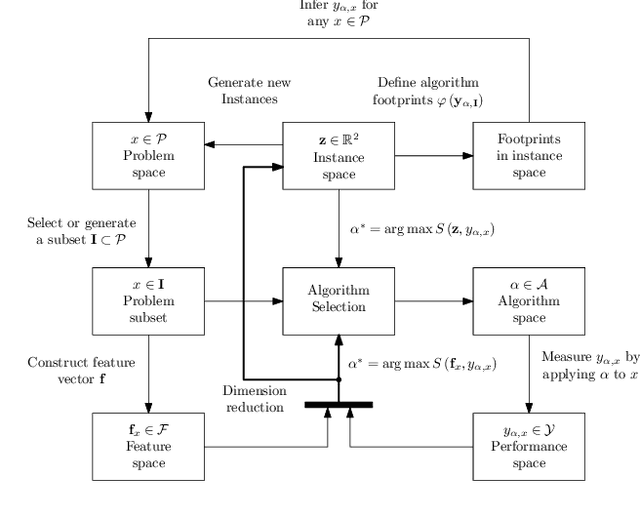

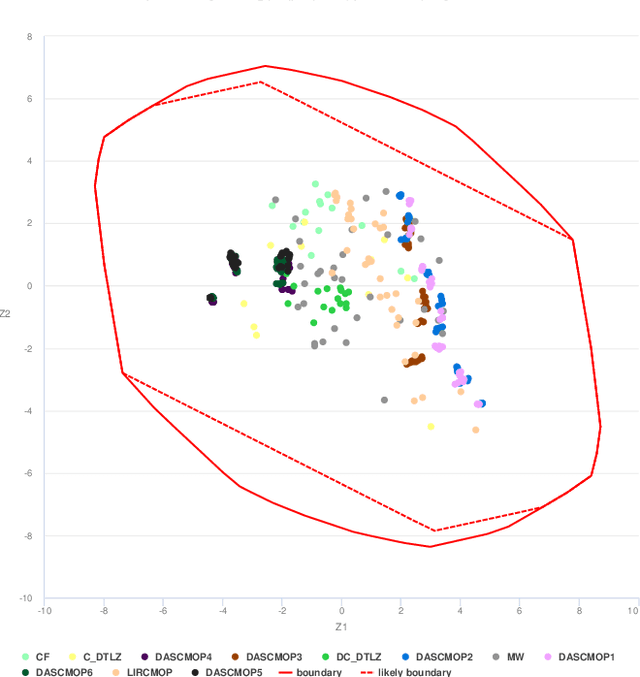
Multi-objective optimization problems with constraints (CMOPs) are generally considered more challenging than those without constraints. This in part can be attributed to the creation of infeasible regions generated by the constraint functions, and/or the interaction between constraints and objectives. In this paper, we explore the relationship between constrained multi-objective evolutionary algorithms (CMOEAs) performance and CMOP instances characteristics using Instance Space Analysis (ISA). To do this, we extend recent work focused on the use of Landscape Analysis features to characterise CMOP. Specifically, we scrutinise the multi-objective landscape and introduce new features to describe the multi-objective-violation landscape, formed by the interaction between constraint violation and multi-objective fitness. Detailed evaluation of problem-algorithm footprints spanning six CMOP benchmark suites and fifteen CMOEAs, illustrates that ISA can effectively capture the strength and weakness of the CMOEAs. We conclude that two key characteristics, the isolation of non-dominate set and the correlation between constraints and objectives evolvability, have the greatest impact on algorithm performance. However, the current benchmarks problems do not provide enough diversity to fully reveal the efficacy of CMOEAs evaluated.
Machine learning with incomplete datasets using multi-objective optimization models
Dec 04, 2020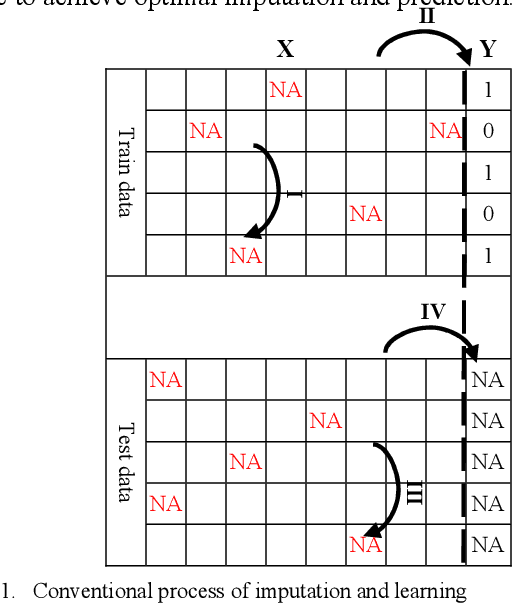
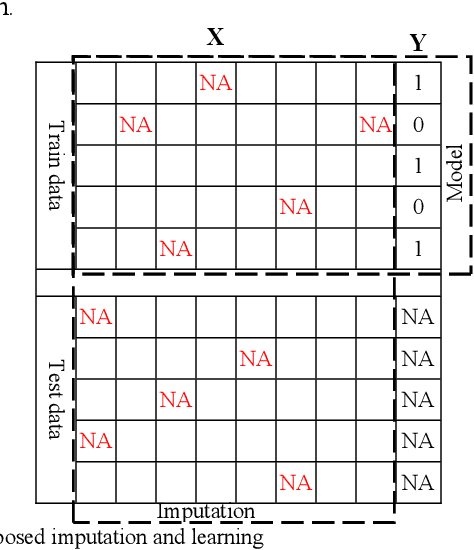
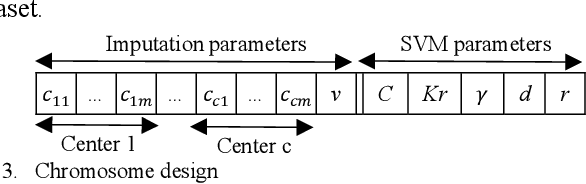
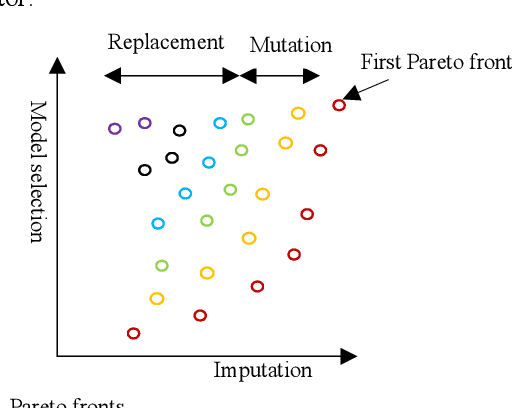
Machine learning techniques have been developed to learn from complete data. When missing values exist in a dataset, the incomplete data should be preprocessed separately by removing data points with missing values or imputation. In this paper, we propose an online approach to handle missing values while a classification model is learnt. To reach this goal, we develop a multi-objective optimization model with two objective functions for imputation and model selection. We also propose three formulations for imputation objective function. We use an evolutionary algorithm based on NSGA II to find the optimal solutions as the Pareto solutions. We investigate the reliability and robustness of the proposed model using experiments by defining several scenarios in dealing with missing values and classification. We also describe how the proposed model can contribute to medical informatics. We compare the performance of three different formulations via experimental results. The proposed model results get validated by comparing with a comparable literature.
Boosting Ant Colony Optimization via Solution Prediction and Machine Learning
Jul 29, 2020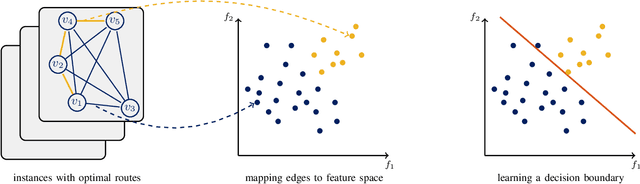
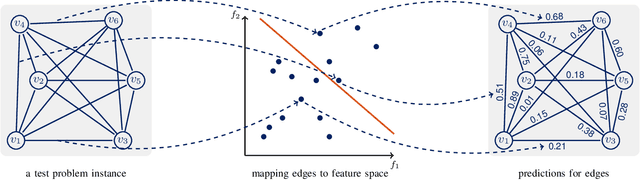
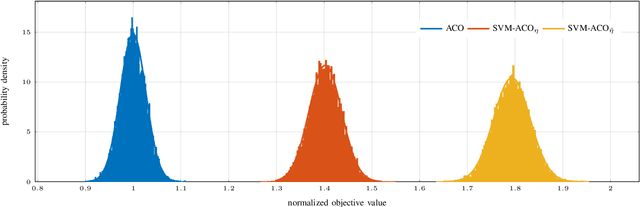
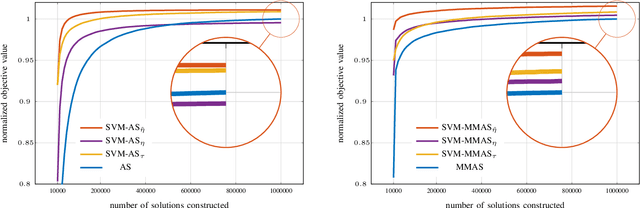
This paper introduces an enhanced meta-heuristic (ML-ACO) that combines machine learning (ML) and ant colony optimization (ACO) to solve combinatorial optimization problems. To illustrate the underlying mechanism of our enhanced algorithm, we start by describing a test problem -- the orienteering problem -- used to demonstrate the efficacy of ML-ACO. In this problem, the objective is to find a route that visits a subset of vertices in a graph within a time budget to maximize the collected score. In the first phase of our ML-ACO algorithm, an ML model is trained using a set of small problem instances where the optimal solution is known. Specifically, classification models are used to classify an edge as being part of the optimal route, or not, using problem-specific features and statistical measures. We have tested several classification models including graph neural networks, logistic regression and support vector machines. The trained model is then used to predict the probability that an edge in the graph of a test problem instance belongs to the corresponding optimal route. In the second phase, we incorporate the predicted probabilities into the ACO component of our algorithm. Here, the probability values bias sampling towards favoring those predicted high-quality edges when constructing feasible routes. We empirically show that ML-ACO generates results that are significantly better than the standard ACO algorithm, especially when the computational budget is limited. Furthermore, we show our algorithm is robust in the sense that (a) its overall performance is not sensitive to any particular classification model, and (b) it generalizes well to large and real-world problem instances. Our approach integrating ML with a meta-heuristic is generic and can be applied to a wide range of combinatorial optimization problems.
Dynamic Multi-objective Optimization of the Travelling Thief Problem
Feb 07, 2020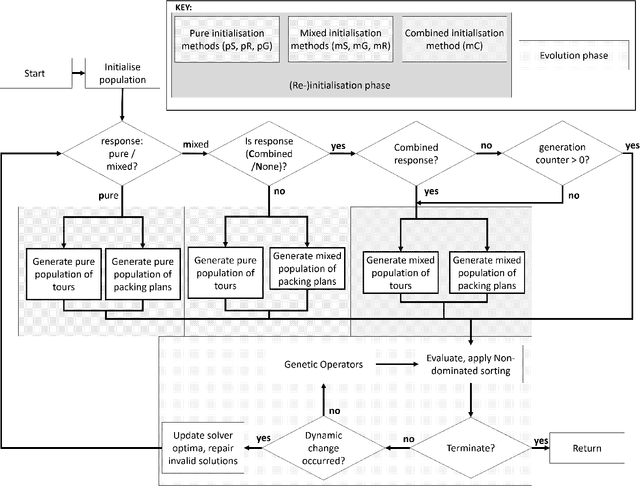
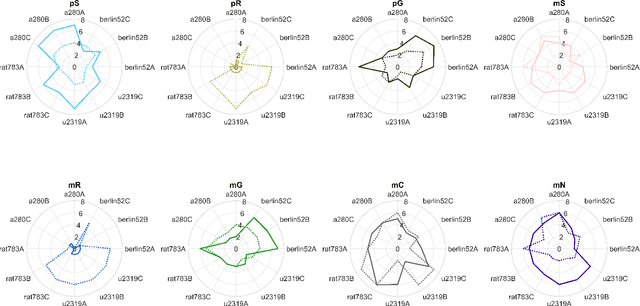
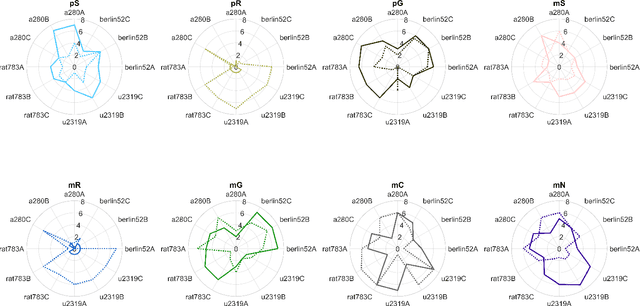
Investigation of detailed and complex optimisation problem formulations that reflect realistic scenarios is a burgeoning field of research. A growing body of work exists for the Travelling Thief Problem, including multi-objective formulations and comparisons of exact and approximate methods to solve it. However, as many realistic scenarios are non-static in time, dynamic formulations have yet to be considered for the TTP. Definition of dynamics within three areas of the TTP problem are addressed; in the city locations, availability map and item values. Based on the elucidation of solution conservation between initial sets and obtained non-dominated sets, we define a range of initialisation mechanisms using solutions generated via solvers, greedily and randomly. These are then deployed to seed the population after a change and the performance in terms of hypervolume and spread is presented for comparison. Across a range of problems with varying TSP-component and KP-component sizes, we observe interesting trends in line with existing conclusions; there is little benefit to using randomisation as a strategy for initialisation of solution populations when the optimal TSP and KP component solutions can be exploited. Whilst these separate optima don't guarantee good TTP solutions, when combined, provide better initial performance and therefore in some examined instances, provides the best response to dynamic changes. A combined approach that mixes solution generation methods to provide a composite population in response to dynamic changes provides improved performance in some instances for the different dynamic TTP formulations. Potential for further development of a more cooperative combined method are realised to more cohesively exploit known information about the problems.