 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Foundation Models for Dynamical Systems from Purely Synthetic Data
Nov 30, 2024



Foundation models have demonstrated remarkable generalization, data efficiency, and robustness properties across various domains. In this paper, we explore the feasibility of foundation models for applications in the control domain. The success of these models is enabled by large-scale pretaining on Internet-scale datasets. These are available in fields like natural language processing and computer vision, but do not exist for dynamical systems. We address this challenge by pretraining a transformer-based foundation model exclusively on synthetic data and propose to sample dynamics functions from a reproducing kernel Hilbert space. Our pretrained model generalizes for prediction tasks across different dynamical systems, which we validate in simulation and hardware experiments, including cart-pole and Furuta pendulum setups. Additionally, the model can be fine-tuned effectively to new systems to increase performance even further. Our results demonstrate the feasibility of foundation models for dynamical systems that outperform specialist models in terms of generalization, data efficiency, and robustness.
TEXEL: A neuromorphic processor with on-chip learning for beyond-CMOS device integration
Oct 21, 2024



Recent advances in memory technologies, devices and materials have shown great potential for integration into neuromorphic electronic systems. However, a significant gap remains between the development of these materials and the realization of large-scale, fully functional systems. One key challenge is determining which devices and materials are best suited for specific functions and how they can be paired with CMOS circuitry. To address this, we introduce TEXEL, a mixed-signal neuromorphic architecture designed to explore the integration of on-chip learning circuits and novel two- and three-terminal devices. TEXEL serves as an accessible platform to bridge the gap between CMOS-based neuromorphic computation and the latest advancements in emerging devices. In this paper, we demonstrate the readiness of TEXEL for device integration through comprehensive chip measurements and simulations. TEXEL provides a practical system for testing bio-inspired learning algorithms alongside emerging devices, establishing a tangible link between brain-inspired computation and cutting-edge device research.
Asymmetrically connected reservoir networks learn better
Oct 01, 2024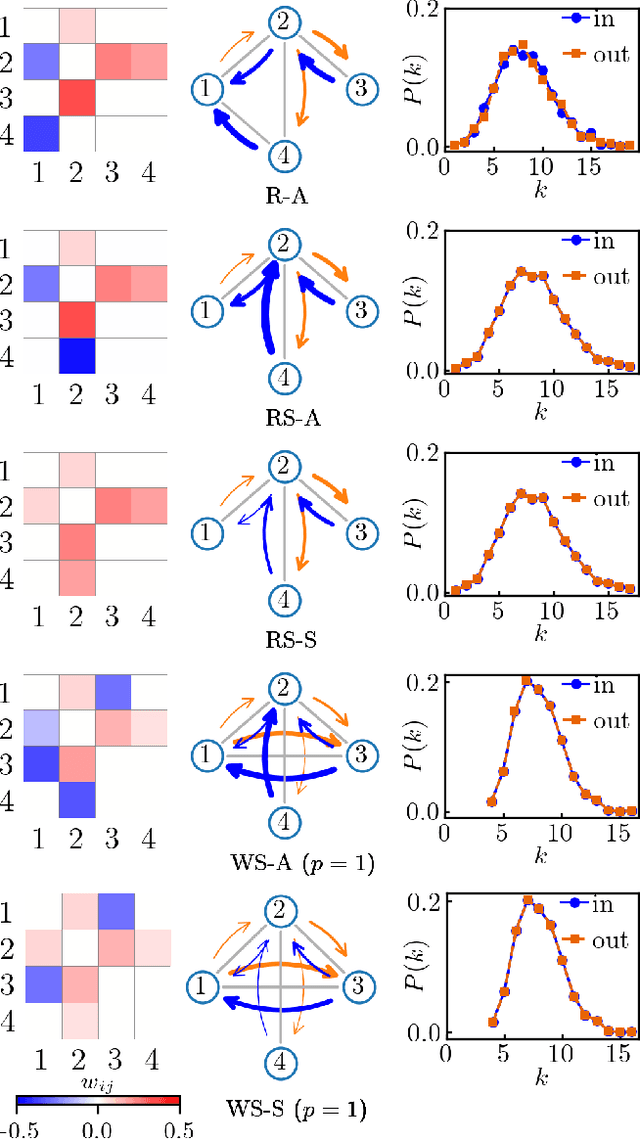
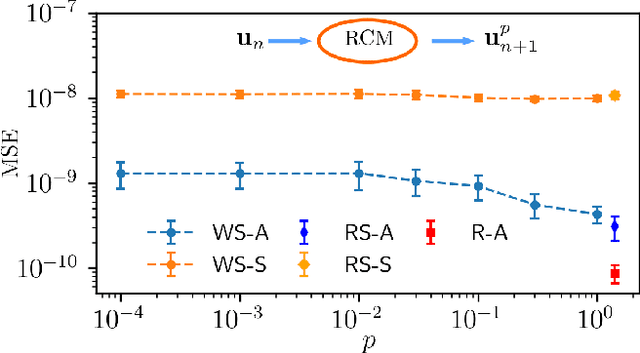
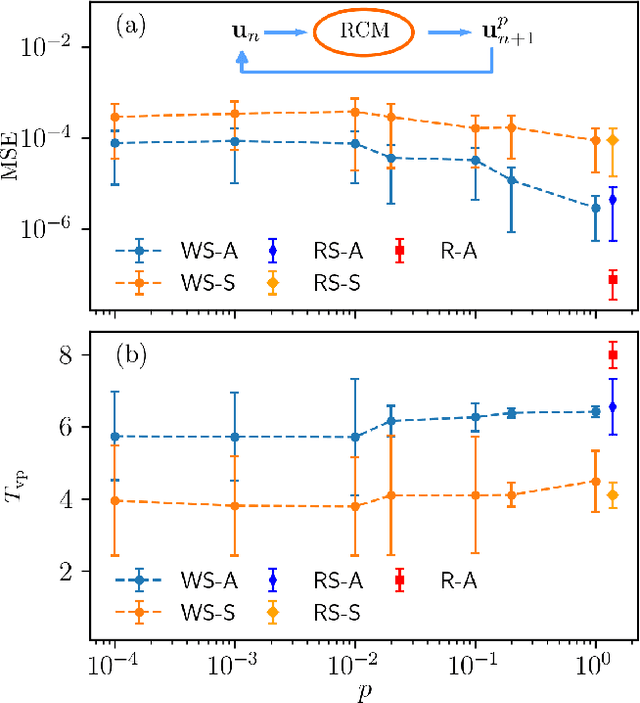
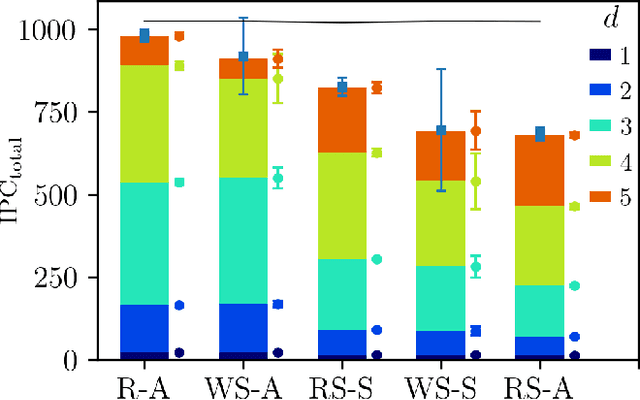
We show that connectivity within the high-dimensional recurrent layer of a reservoir network is crucial for its performance. To this end, we systematically investigate the impact of network connectivity on its performance, i.e., we examine the symmetry and structure of the reservoir in relation to its computational power. Reservoirs with random and asymmetric connections are found to perform better for an exemplary Mackey-Glass time series than all structured reservoirs, including biologically inspired connectivities, such as small-world topologies. This result is quantified by the information processing capacity of the different network topologies which becomes highest for asymmetric and randomly connected networks.
Distributed Representations Enable Robust Multi-Timescale Computation in Neuromorphic Hardware
May 02, 2024



Programming recurrent spiking neural networks (RSNNs) to robustly perform multi-timescale computation remains a difficult challenge. To address this, we show how the distributed approach offered by vector symbolic architectures (VSAs), which uses high-dimensional random vectors as the smallest units of representation, can be leveraged to embed robust multi-timescale dynamics into attractor-based RSNNs. We embed finite state machines into the RSNN dynamics by superimposing a symmetric autoassociative weight matrix and asymmetric transition terms. The transition terms are formed by the VSA binding of an input and heteroassociative outer-products between states. Our approach is validated through simulations with highly non-ideal weights; an experimental closed-loop memristive hardware setup; and on Loihi 2, where it scales seamlessly to large state machines. This work demonstrates the effectiveness of VSA representations for embedding robust computation with recurrent dynamics into neuromorphic hardware, without requiring parameter fine-tuning or significant platform-specific optimisation. This advances VSAs as a high-level representation-invariant abstract language for cognitive algorithms in neuromorphic hardware.
Vector Symbolic Finite State Machines in Attractor Neural Networks
Dec 02, 2022Hopfield attractor networks are robust distributed models of human memory. We propose construction rules such that an attractor network may implement an arbitrary finite state machine (FSM), where states and stimuli are represented by high-dimensional random bipolar vectors, and all state transitions are enacted by the attractor network's dynamics. Numerical simulations show the capacity of the model, in terms of the maximum size of implementable FSM, to be linear in the size of the attractor network. We show that the model is robust to imprecise and noisy weights, and so a prime candidate for implementation with high-density but unreliable devices. By endowing attractor networks with the ability to emulate arbitrary FSMs, we propose a plausible path by which FSMs may exist as a distributed computational primitive in biological neural networks.
Logical Limitations to Machine Ethics with Consequences to Lethal Autonomous Weapons
Nov 11, 2014Lethal Autonomous Weapons promise to revolutionize warfare -- and raise a multitude of ethical and legal questions. It has thus been suggested to program values and principles of conduct (such as the Geneva Conventions) into the machines' control, thereby rendering them both physically and morally superior to human combatants. We employ mathematical logic and theoretical computer science to explore fundamental limitations to the moral behaviour of intelligent machines in a series of "Gedankenexperiments": Refining and sharpening variants of the Trolley Problem leads us to construct an (admittedly artificial but) fully deterministic situation where a robot is presented with two choices: one morally clearly preferable over the other -- yet, based on the undecidability of the Halting problem, it provably cannot decide algorithmically which one. Our considerations have surprising implications to the question of responsibility and liability for an autonomous system's actions and lead to specific technical recommendations.
Variations of the Turing Test in the Age of Internet and Virtual Reality
Apr 23, 2009
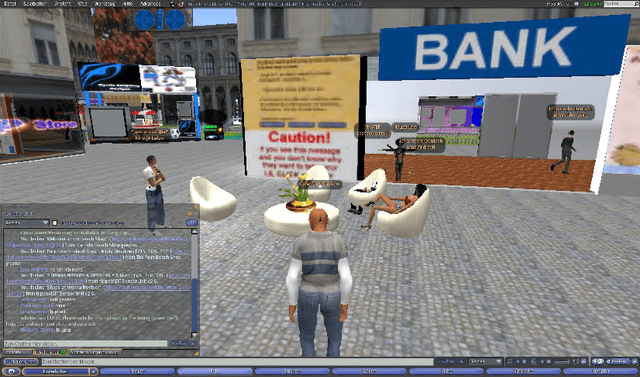
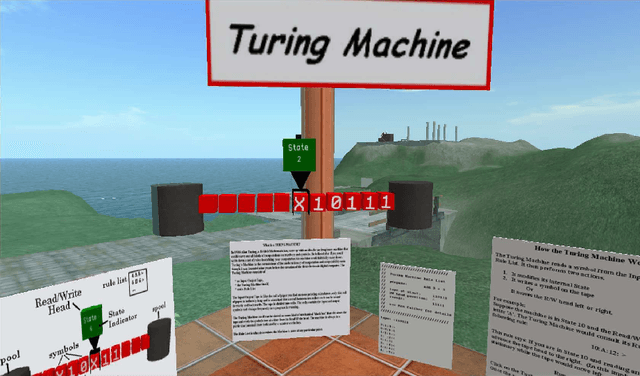
Inspired by Hofstadter's Coffee-House Conversation (1982) and by the science fiction short story SAM by Schattschneider (1988), we propose and discuss criteria for non-mechanical intelligence. Firstly, we emphasize the practical need for such tests in view of massively multiuser online role-playing games (MMORPGs) and virtual reality systems like Second Life. Secondly, we demonstrate Second Life as a useful framework for implementing (some iterations of) that test.