 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving the swing-up and balance task for the Acrobot and Pendubot with SAC
Dec 18, 2023



We present a solution of the swing-up and balance task for the pendubot and acrobot for the participation in the AI Olympics competition at IJCAI 2023. Our solution is based on the Soft Actor Crtic (SAC) reinforcement learning (RL) algorithm for training a policy for the swing-up and entering the region of attraction of a linear quadratic regulator(LQR) controller for stabilizing the double pendulum at the top position. Our controller achieves competitive scores in performance and robustness for both, pendubot and acrobot, problem scenarios.
A systems design approach for the co-design of a humanoid robot arm
Dec 29, 2022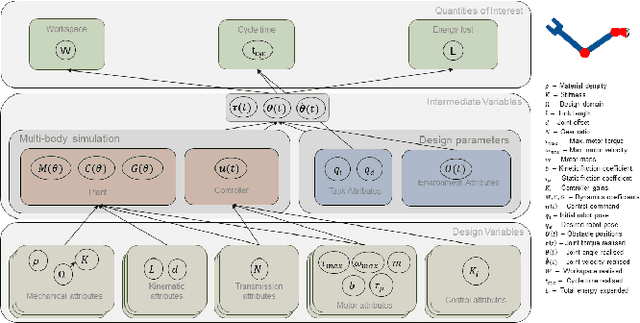


Classically, the development of humanoid robots has been sequential and iterative. Such bottom-up design procedures rely heavily on intuition and are often biased by the designer's experience. Exploiting the non-linear coupled design space of robots is non-trivial and requires a systematic procedure for exploration. We adopt the top-down design strategy, the V-model, used in automotive and aerospace industries. Our co-design approach identifies non-intuitive designs from within the design space and obtains the maximum permissible range of the design variables as a solution space, to physically realise the obtained design. We show that by constructing the solution space, one can (1) decompose higher-level requirements onto sub-system-level requirements with tolerance, alleviating the "chicken-or-egg" problem during the design process, (2) decouple the robot's morphology from its controller, enabling greater design flexibility, (3) obtain independent sub-system level requirements, reducing the development time by parallelising the development process.
On Integrating Prior Knowledge into Gaussian Processes for Prognostic Health Monitoring
Jun 17, 2022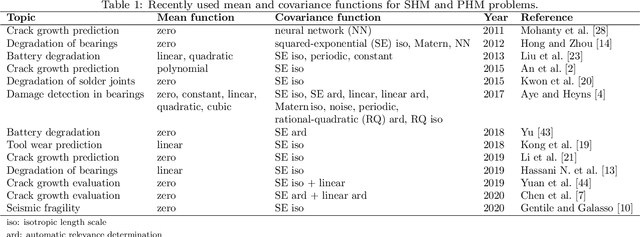
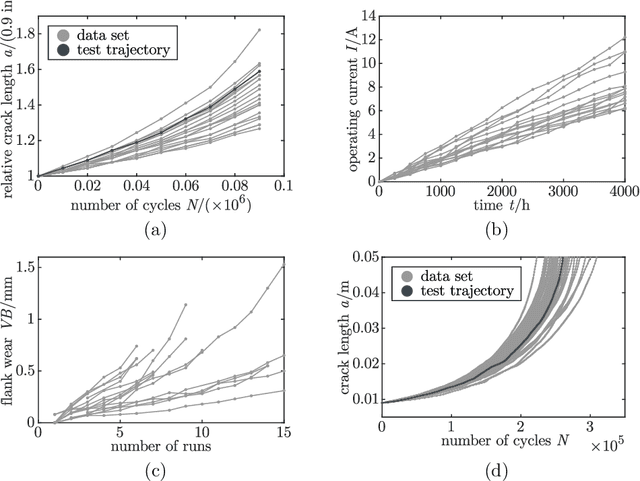

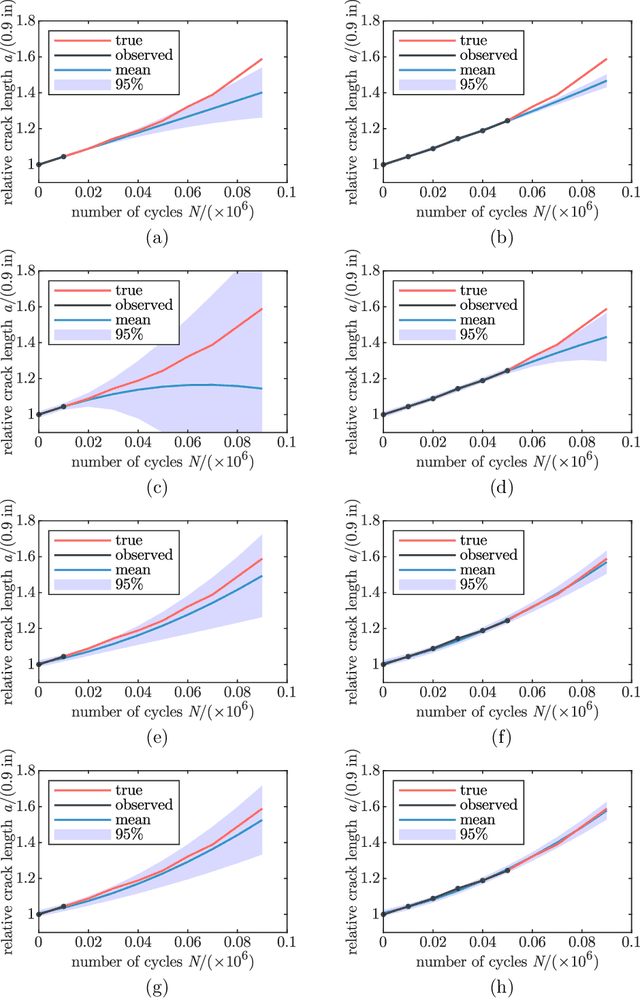
Gaussian process regression is a powerful method for predicting states based on given data. It has been successfully applied for probabilistic predictions of structural systems to quantify, for example, the crack growth in mechanical structures. Typically, predefined mean and covariance functions are employed to construct the Gaussian process model. Then, the model is updated using current data during operation while prior information based on previous data is ignored. However, predefined mean and covariance functions without prior information reduce the potential of Gaussian processes. This paper proposes a method to improve the predictive capabilities of Gaussian processes. We integrate prior knowledge by deriving the mean and covariance functions from previous data. More specifically, we first approximate previous data by a weighted sum of basis functions and then derive the mean and covariance functions directly from the estimated weight coefficients. Basis functions may be either estimated or derived from problem-specific governing equations to incorporate physical information. The applicability and effectiveness of this approach are demonstrated for fatigue crack growth, laser degradation, and milling machine wear data. We show that well-chosen mean and covariance functions, like those based on previous data, significantly increase look-ahead time and accuracy. Using physical basis functions further improves accuracy. In addition, computation effort for training is significantly reduced.
Predicting Osteoarthritis Progression in Radiographs via Unsupervised Representation Learning
Nov 22, 2021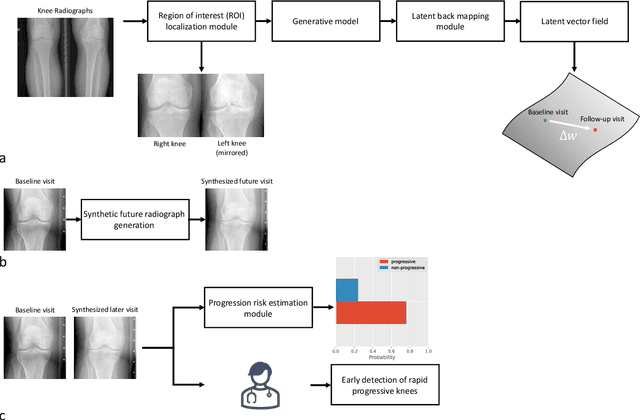
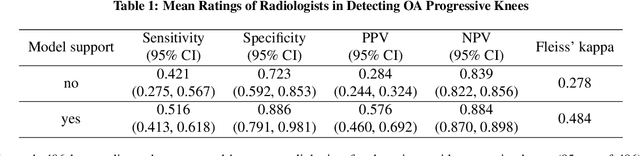
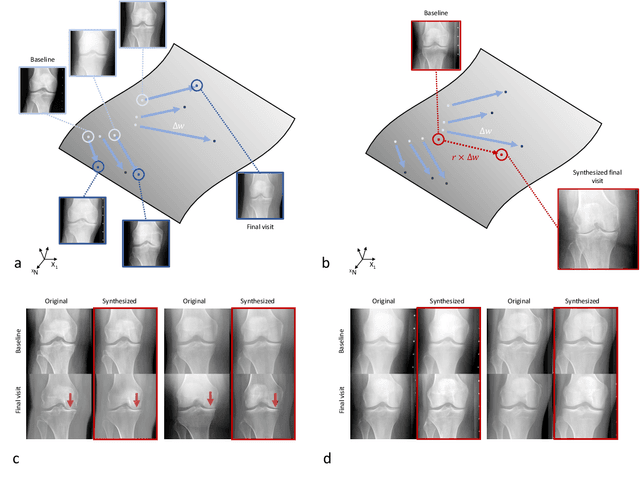
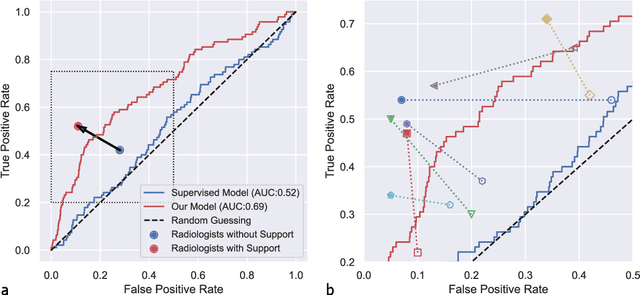
Osteoarthritis (OA) is the most common joint disorder affecting substantial proportions of the global population, primarily the elderly. Despite its individual and socioeconomic burden, the onset and progression of OA can still not be reliably predicted. Aiming to fill this diagnostic gap, we introduce an unsupervised learning scheme based on generative models to predict the future development of OA based on knee joint radiographs. Using longitudinal data from osteoarthritis studies, we explore the latent temporal trajectory to predict a patient's future radiographs up to the eight-year follow-up visit. Our model predicts the risk of progression towards OA and surpasses its supervised counterpart whose input was provided by seven experienced radiologists. With the support of the model, sensitivity, specificity, positive predictive value, and negative predictive value increased significantly from 42.1% to 51.6%, from 72.3% to 88.6%, from 28.4% to 57.6%, and from 83.9% to 88.4%, respectively, while without such support, radiologists performed only slightly better than random guessing. Our predictive model improves predictions on OA onset and progression, despite requiring no human annotation in the training phase.
Advancing diagnostic performance and clinical usability of neural networks via adversarial training and dual batch normalization
Nov 25, 2020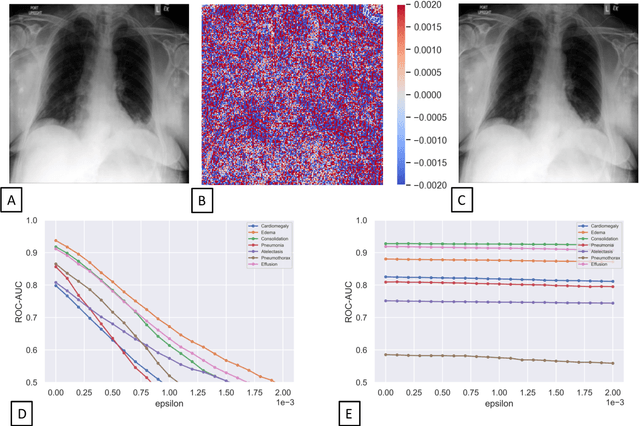

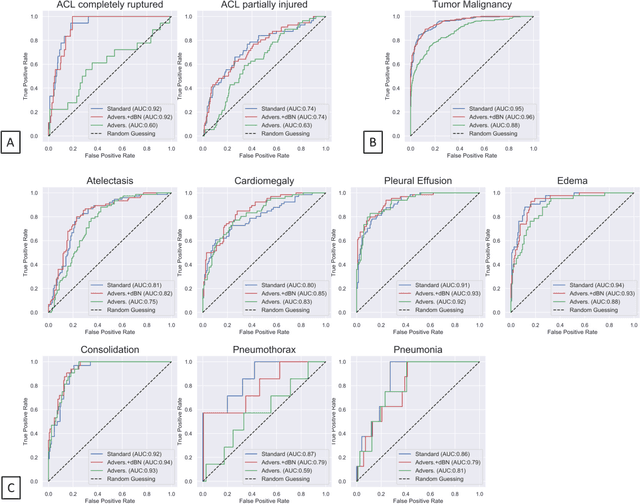

Unmasking the decision-making process of machine learning models is essential for implementing diagnostic support systems in clinical practice. Here, we demonstrate that adversarially trained models can significantly enhance the usability of pathology detection as compared to their standard counterparts. We let six experienced radiologists rate the interpretability of saliency maps in datasets of X-rays, computed tomography, and magnetic resonance imaging scans. Significant improvements were found for our adversarial models, which could be further improved by the application of dual batch normalization. Contrary to previous research on adversarially trained models, we found that the accuracy of such models was equal to standard models when sufficiently large datasets and dual batch norm training were used. To ensure transferability, we additionally validated our results on an external test set of 22,433 X-rays. These findings elucidate that different paths for adversarial and real images are needed during training to achieve state of the art results with superior clinical interpretability.