 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA systems design approach for the co-design of a humanoid robot arm
Dec 29, 2022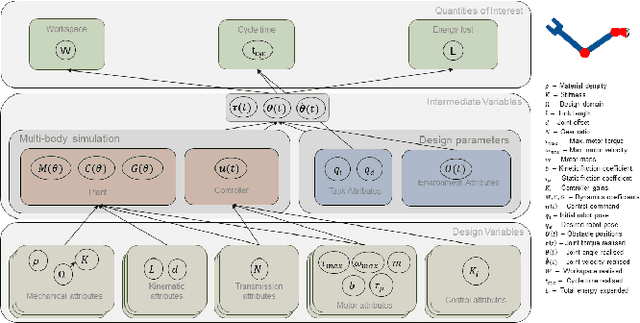


Classically, the development of humanoid robots has been sequential and iterative. Such bottom-up design procedures rely heavily on intuition and are often biased by the designer's experience. Exploiting the non-linear coupled design space of robots is non-trivial and requires a systematic procedure for exploration. We adopt the top-down design strategy, the V-model, used in automotive and aerospace industries. Our co-design approach identifies non-intuitive designs from within the design space and obtains the maximum permissible range of the design variables as a solution space, to physically realise the obtained design. We show that by constructing the solution space, one can (1) decompose higher-level requirements onto sub-system-level requirements with tolerance, alleviating the "chicken-or-egg" problem during the design process, (2) decouple the robot's morphology from its controller, enabling greater design flexibility, (3) obtain independent sub-system level requirements, reducing the development time by parallelising the development process.
A Plenum-Based Calibration Device for Tactile Sensor Arrays
Mar 23, 2021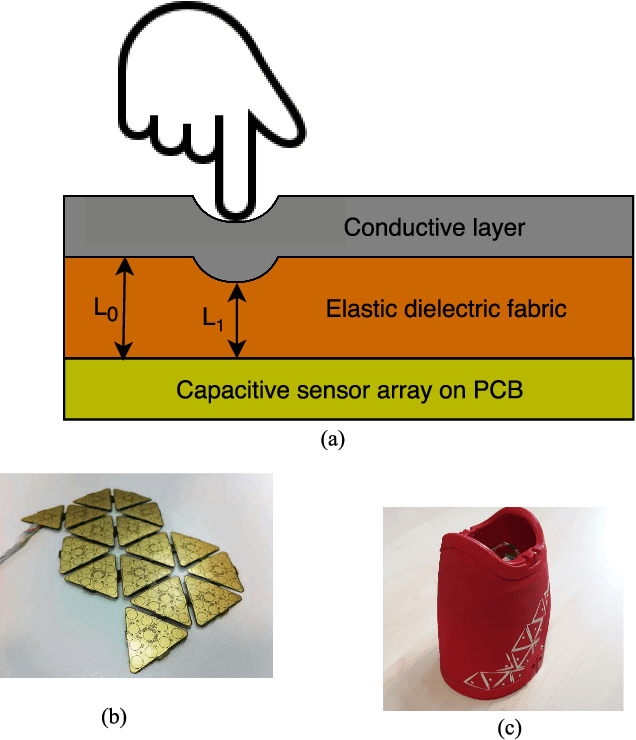
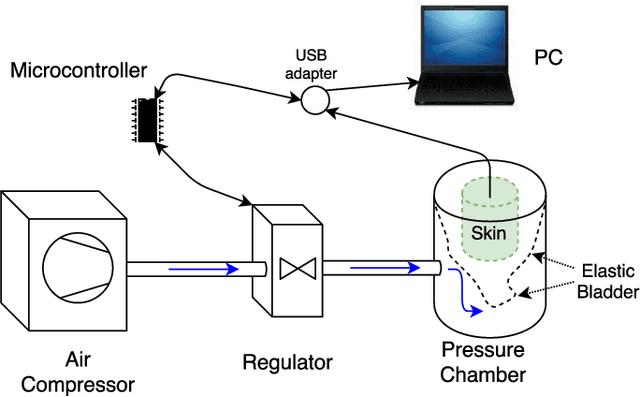
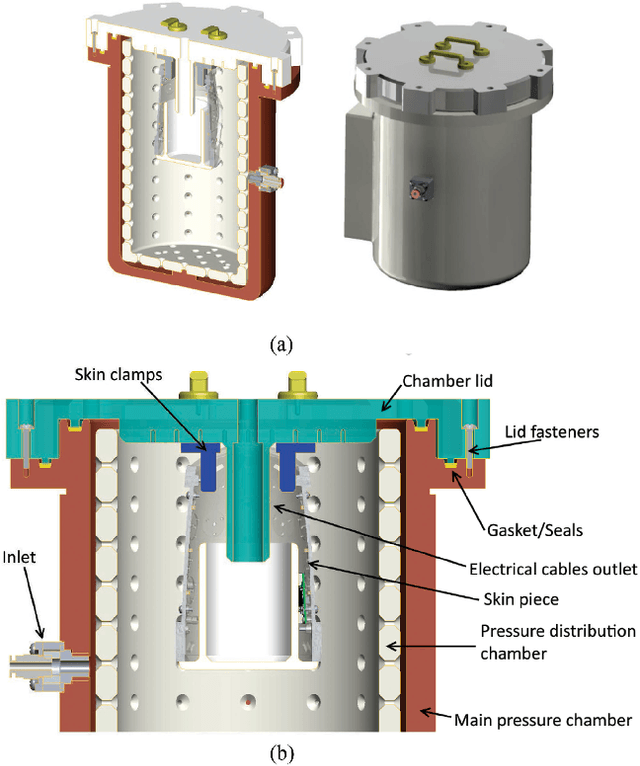
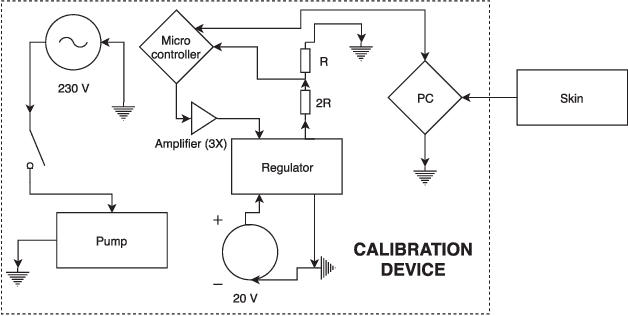
In modern robotic applications, tactile sensor arrays (i.e., artificial skins) are an emergent solution to determine the locations of contacts between a robot and an external agent. Localizing the point of contact is useful but determining the force applied on the skin provides many additional possibilities. This additional feature usually requires time-consuming calibration procedures to relate the sensor readings to the applied forces. This letter presents a novel device that enables the calibration of tactile sensor arrays in a fast and simple way. The key idea is to design a plenum chamber where the skin is inserted, and then the calibration of the tactile sensors is achieved by relating the air pressure and the sensor readings. This general concept is tested experimentally to calibrate the skin of the iCub robot. The validation of the calibration device is achieved by placing the masses of known weight on the artificial skin and comparing the applied force against the one estimated by the sensors.
* 8 pages, 18 figures