 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeofenced Unmanned Aerial Robotic Defender for Deer Detection and Deterrence (GUARD)
May 16, 2025Wildlife-induced crop damage, particularly from deer, threatens agricultural productivity. Traditional deterrence methods often fall short in scalability, responsiveness, and adaptability to diverse farmland environments. This paper presents an integrated unmanned aerial vehicle (UAV) system designed for autonomous wildlife deterrence, developed as part of the Farm Robotics Challenge. Our system combines a YOLO-based real-time computer vision module for deer detection, an energy-efficient coverage path planning algorithm for efficient field monitoring, and an autonomous charging station for continuous operation of the UAV. In collaboration with a local Minnesota farmer, the system is tailored to address practical constraints such as terrain, infrastructure limitations, and animal behavior. The solution is evaluated through a combination of simulation and field testing, demonstrating robust detection accuracy, efficient coverage, and extended operational time. The results highlight the feasibility and effectiveness of drone-based wildlife deterrence in precision agriculture, offering a scalable framework for future deployment and extension.
A Dialogue System for Assessing Activities of Daily Living: Improving Consistency with Grounded Knowledge
Jul 15, 2023



In healthcare, the ability to care for oneself is reflected in the "Activities of Daily Living (ADL)," which serve as a measure of functional ability (functioning). A lack of functioning may lead to poor living conditions requiring personal care and assistance. To accurately identify those in need of support, assistance programs continuously evaluate participants' functioning across various domains. However, the assessment process may encounter consistency issues when multiple assessors with varying levels of expertise are involved. Novice assessors, in particular, may lack the necessary preparation for real-world interactions with participants. To address this issue, we developed a dialogue system that simulates interactions between assessors and individuals of varying functioning in a natural and reproducible way. The dialogue system consists of two major modules, one for natural language understanding (NLU) and one for natural language generation (NLG), respectively. In order to generate responses consistent with the underlying knowledge base, the dialogue system requires both an understanding of the user's query and of biographical details of an individual being simulated. To fulfill this requirement, we experimented with query classification and generated responses based on those biographical details using some recently released InstructGPT-like models.
* Accepted to ACL 2023 DialDoc Workshop
Quirk or Palmer: A Comparative Study of Modal Verb Frameworks with Annotated Datasets
Dec 20, 2022Modal verbs, such as "can", "may", and "must", are commonly used in daily communication to convey the speaker's perspective related to the likelihood and/or mode of the proposition. They can differ greatly in meaning depending on how they're used and the context of a sentence (e.g. "They 'must' help each other out." vs. "They 'must' have helped each other out.") Despite their practical importance in natural language understanding, linguists have yet to agree on a single, prominent framework for the categorization of modal verb senses. This lack of agreement stems from high degrees of flexibility and polysemy from the modal verbs, making it more difficult for researchers to incorporate insights from this family of words into their work. This work presents Moverb dataset, which consists of 27,240 annotations of modal verb senses over 4,540 utterances containing one or more sentences from social conversations. Each utterance is annotated by three annotators using two different theoretical frameworks (i.e., Quirk and Palmer) of modal verb senses. We observe that both frameworks have similar inter-annotator agreements, despite having different numbers of sense types (8 for Quirk and 3 for Palmer). With the RoBERTa-based classifiers fine-tuned on \dataset, we achieve F1 scores of 82.2 and 78.3 on Quirk and Palmer, respectively, showing that modal verb sense disambiguation is not a trivial task. Our dataset will be publicly available with our final version.
SIERRA: A Modular Framework for Research Automation and Reproducibility
Aug 16, 2022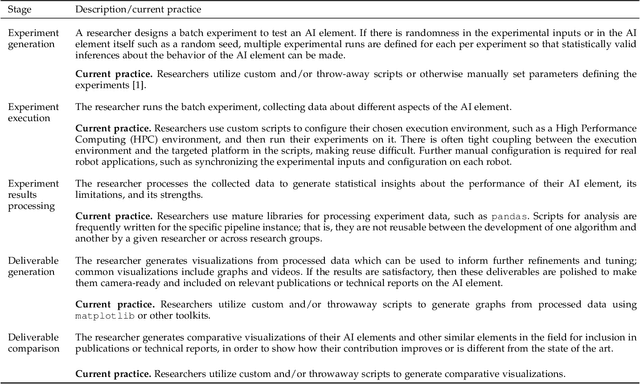
Modern intelligent systems researchers form hypotheses about system behavior and then run experiments using one or more independent variables to test their hypotheses. We present SIERRA, a novel framework structured around that idea for accelerating research development and improving reproducibility of results. SIERRA accelerates research by automating the process of generating executable experiments from queries over independent variables(s), executing experiments, and processing the results to generate deliverables such as graphs and videos. It shifts the paradigm for testing hypotheses from procedural ("Do these steps to answer the query") to declarative ("Here is the query to test--GO!"), reducing the burden on researchers. It employs a modular architecture enabling easy customization and extension for the needs of individual researchers, thereby eliminating manual configuration and processing via throw-away scripts. SIERRA improves reproducibility of research by providing automation independent of the execution environment (HPC hardware, real robots, etc.) and targeted platform (arbitrary simulator or real robots). This enables exact experiment replication, up to the limit of the execution environment and platform, as well as making it easy for researchers to test hypotheses in different computational environments.
SIERRA: A Modular Framework for Research Automation
Mar 03, 2022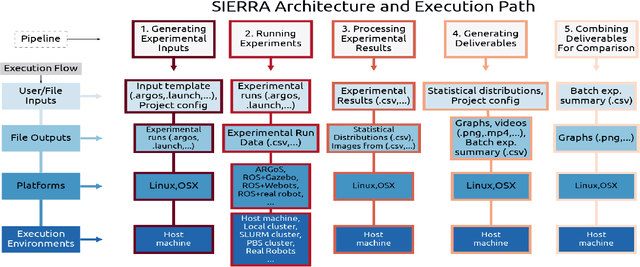
Modern intelligent systems researchers employ the scientific method: they form hypotheses about system behavior, and then run experiments using one or more independent variables to test their hypotheses. We present SIERRA, a novel framework structured around that idea for accelerating research developments and improving reproducibility of results. SIERRA makes it easy to quickly specify the independent variable(s) for an experiment, generate experimental inputs, automatically run the experiment, and process the results to generate deliverables such as graphs and videos. SIERRA provides reproducible automation independent of the execution environment (HPC hardware, real robots, etc.) and targeted platform (arbitrary simulator or real robots), enabling exact experiment replication (up to the limit of the execution environment and platform). It employs a deeply modular approach that allows easy customization and extension of automation for the needs of individual researchers, thereby eliminating manual experiment configuration and result processing via throw-away scripts.
Characterizing The Limits of Linear Modeling of Non-Linear Swarm Behaviors
Oct 23, 2021
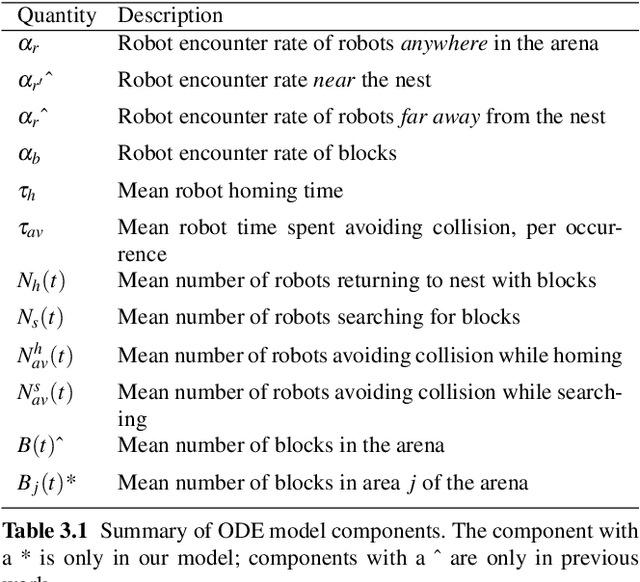


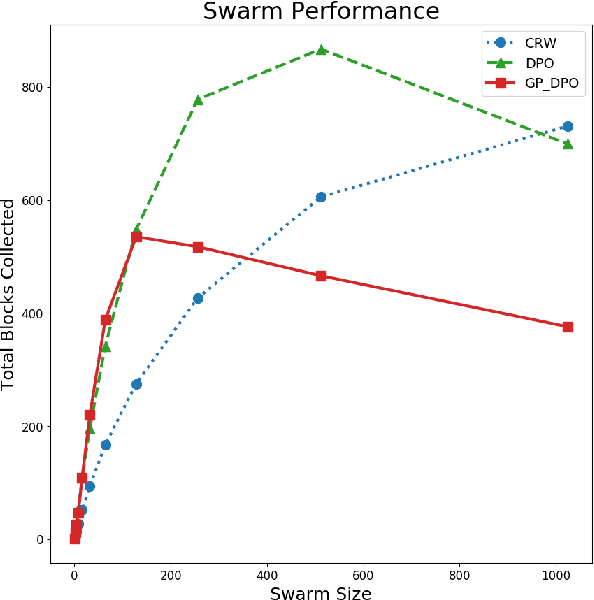
We study the limits of linear modeling of swarm behavior by characterizing the inflection point beyond which linear models of swarm collective behavior break down. The problem we consider is a central place object gathering task. We design a linear model which strives to capture the underlying dynamics of object gathering in robot swarms from first principles, rather than extensively relying on post-hoc model fitting. We evaluate our model with swarms of up to 8,000 robots in simulation, demonstrating that it accurately captures underlying swarm behavioral dynamics when the swarm can be approximated using the mean-field model, and when it cannot, and finite-size effects are present. We further apply our model to swarms exhibiting non-linear behaviors, and show that it still provides accurate predictions in some scenarios, thereby establishing better practical limits on linear modeling of swarm behaviors.
Robotics Enabling the Workforce
Dec 16, 2020Robotics has the potential to magnify the skilled workforce of the nation by complementing our workforce with automation: teams of people and robots will be able to do more than either could alone. The economic engine of the U.S. runs on the productivity of our people. The rise of automation offers new opportunities to enhance the work of our citizens and drive the innovation and prosperity of our industries. Most critically, we need research to understand how future robot technologies can best complement our workforce to get the best of both human and automated labor in a collaborative team. Investments made in robotics research and workforce development will lead to increased GDP, an increased export-import ratio, a growing middle class of skilled workers, and a U.S.-based supply chain that can withstand global pandemics and other disruptions. In order to make the United States a leader in robotics, we need to invest in basic research, technology development, K-16 education, and lifelong learning.
Artificial Intelligence & Cooperation
Dec 10, 2020The rise of Artificial Intelligence (AI) will bring with it an ever-increasing willingness to cede decision-making to machines. But rather than just giving machines the power to make decisions that affect us, we need ways to work cooperatively with AI systems. There is a vital need for research in "AI and Cooperation" that seeks to understand the ways in which systems of AIs and systems of AIs with people can engender cooperative behavior. Trust in AI is also key: trust that is intrinsic and trust that can only be earned over time. Here we use the term "AI" in its broadest sense, as employed by the recent 20-Year Community Roadmap for AI Research (Gil and Selman, 2019), including but certainly not limited to, recent advances in deep learning. With success, cooperation between humans and AIs can build society just as human-human cooperation has. Whether coming from an intrinsic willingness to be helpful, or driven through self-interest, human societies have grown strong and the human species has found success through cooperation. We cooperate "in the small" -- as family units, with neighbors, with co-workers, with strangers -- and "in the large" as a global community that seeks cooperative outcomes around questions of commerce, climate change, and disarmament. Cooperation has evolved in nature also, in cells and among animals. While many cases involving cooperation between humans and AIs will be asymmetric, with the human ultimately in control, AI systems are growing so complex that, even today, it is impossible for the human to fully comprehend their reasoning, recommendations, and actions when functioning simply as passive observers.
Improved Swarm Engineering: Aligning Intuition and Analysis
Dec 08, 2020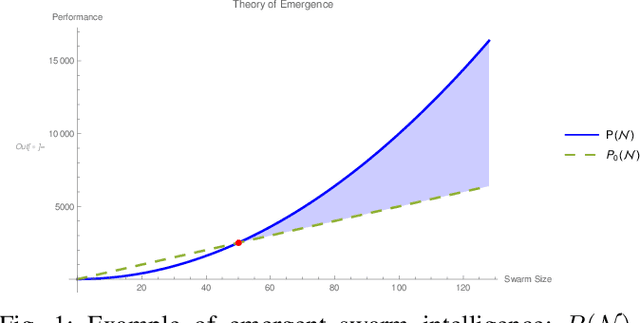

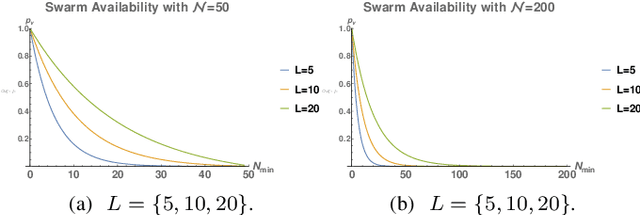

When designing swarm-robotic systems, systematic comparison of swarm control algorithms is necessary to determine which can scale up to handle the target problem size and operating conditions. Qualitative predictions of performance based on algorithm descriptions are often incorrect, and can lead to costly design processes for swarm-robotic systems. We propose a set of quantitative measures for swarm scalability, emergence, flexibility, and robustness which enable swarm control algorithms analysis and comparison, swarm performance of a given control algorithm, collectively enabling quicker and more confident design decisions. We demonstrate the utility of our proposed measurements as modeling and design tools for real-world scenarios by analyzing two common problems, indoor warehouse object transport and search and rescue, and present experimental results obtained in simulation.
Swarm Engineering Through Quantitative Measurement of Swarm Robotic Principles in a 10,000 Robot Swarm
Jul 08, 2019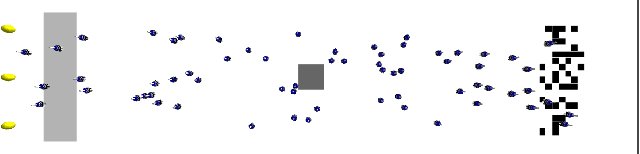


When designing swarm-robotic systems, systematic comparison of algorithms from different domains is necessary to determine which is capable of scaling up to handle the target problem size and target operating conditions. We propose a set of quantitative metrics for scalability, flexibility, and emergence which are capable of addressing these needs during the system design process. We demonstrate the applicability of our proposed metrics as a design tool by solving a large object gathering problem in temporally varying operating conditions using iterative hypothesis evaluation. We provide experimental results obtained in simulation for swarms of over 10,000 robots.