 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIERRA: A Modular Framework for Research Automation and Reproducibility
Aug 16, 2022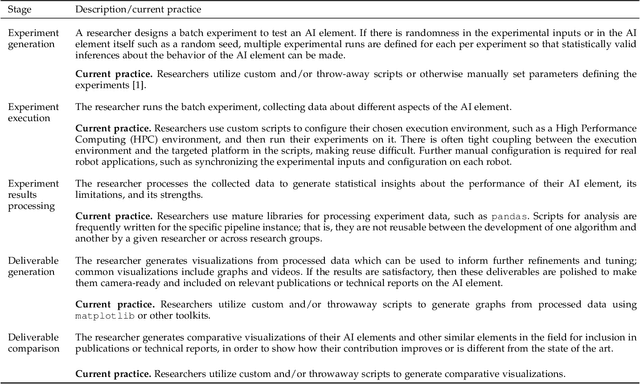
Modern intelligent systems researchers form hypotheses about system behavior and then run experiments using one or more independent variables to test their hypotheses. We present SIERRA, a novel framework structured around that idea for accelerating research development and improving reproducibility of results. SIERRA accelerates research by automating the process of generating executable experiments from queries over independent variables(s), executing experiments, and processing the results to generate deliverables such as graphs and videos. It shifts the paradigm for testing hypotheses from procedural ("Do these steps to answer the query") to declarative ("Here is the query to test--GO!"), reducing the burden on researchers. It employs a modular architecture enabling easy customization and extension for the needs of individual researchers, thereby eliminating manual configuration and processing via throw-away scripts. SIERRA improves reproducibility of research by providing automation independent of the execution environment (HPC hardware, real robots, etc.) and targeted platform (arbitrary simulator or real robots). This enables exact experiment replication, up to the limit of the execution environment and platform, as well as making it easy for researchers to test hypotheses in different computational environments.
SIERRA: A Modular Framework for Research Automation
Mar 03, 2022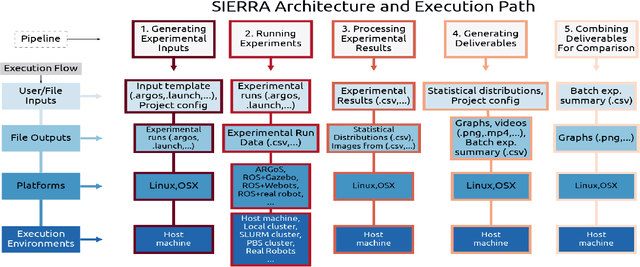
Modern intelligent systems researchers employ the scientific method: they form hypotheses about system behavior, and then run experiments using one or more independent variables to test their hypotheses. We present SIERRA, a novel framework structured around that idea for accelerating research developments and improving reproducibility of results. SIERRA makes it easy to quickly specify the independent variable(s) for an experiment, generate experimental inputs, automatically run the experiment, and process the results to generate deliverables such as graphs and videos. SIERRA provides reproducible automation independent of the execution environment (HPC hardware, real robots, etc.) and targeted platform (arbitrary simulator or real robots), enabling exact experiment replication (up to the limit of the execution environment and platform). It employs a deeply modular approach that allows easy customization and extension of automation for the needs of individual researchers, thereby eliminating manual experiment configuration and result processing via throw-away scripts.
Characterizing The Limits of Linear Modeling of Non-Linear Swarm Behaviors
Oct 23, 2021
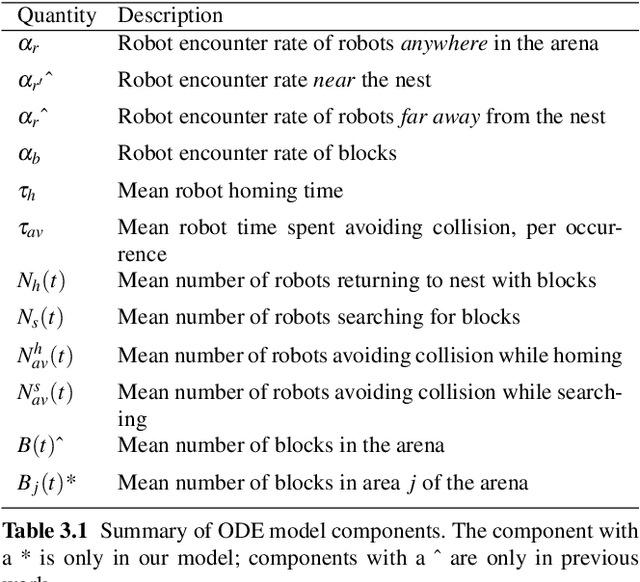


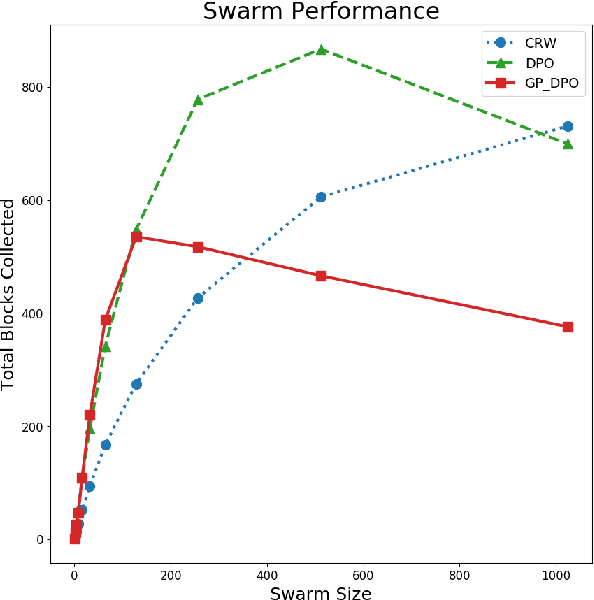
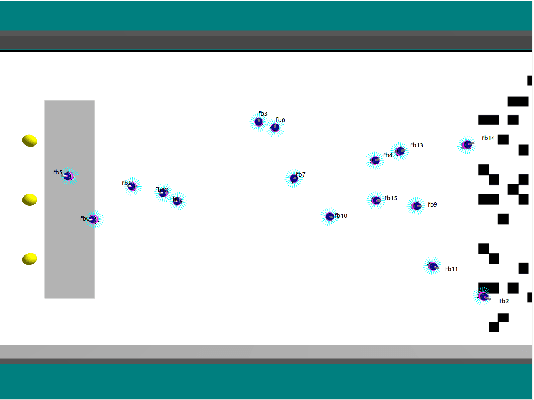
We study the limits of linear modeling of swarm behavior by characterizing the inflection point beyond which linear models of swarm collective behavior break down. The problem we consider is a central place object gathering task. We design a linear model which strives to capture the underlying dynamics of object gathering in robot swarms from first principles, rather than extensively relying on post-hoc model fitting. We evaluate our model with swarms of up to 8,000 robots in simulation, demonstrating that it accurately captures underlying swarm behavioral dynamics when the swarm can be approximated using the mean-field model, and when it cannot, and finite-size effects are present. We further apply our model to swarms exhibiting non-linear behaviors, and show that it still provides accurate predictions in some scenarios, thereby establishing better practical limits on linear modeling of swarm behaviors.
Improved Swarm Engineering: Aligning Intuition and Analysis
Dec 08, 2020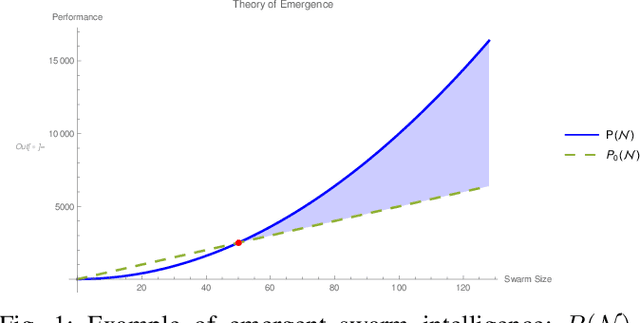

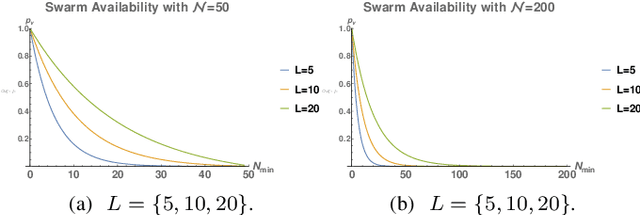

When designing swarm-robotic systems, systematic comparison of swarm control algorithms is necessary to determine which can scale up to handle the target problem size and operating conditions. Qualitative predictions of performance based on algorithm descriptions are often incorrect, and can lead to costly design processes for swarm-robotic systems. We propose a set of quantitative measures for swarm scalability, emergence, flexibility, and robustness which enable swarm control algorithms analysis and comparison, swarm performance of a given control algorithm, collectively enabling quicker and more confident design decisions. We demonstrate the utility of our proposed measurements as modeling and design tools for real-world scenarios by analyzing two common problems, indoor warehouse object transport and search and rescue, and present experimental results obtained in simulation.
Swarm Engineering Through Quantitative Measurement of Swarm Robotic Principles in a 10,000 Robot Swarm
Jul 08, 2019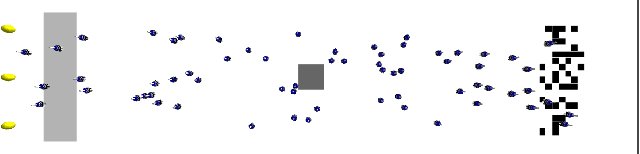


When designing swarm-robotic systems, systematic comparison of algorithms from different domains is necessary to determine which is capable of scaling up to handle the target problem size and target operating conditions. We propose a set of quantitative metrics for scalability, flexibility, and emergence which are capable of addressing these needs during the system design process. We demonstrate the applicability of our proposed metrics as a design tool by solving a large object gathering problem in temporally varying operating conditions using iterative hypothesis evaluation. We provide experimental results obtained in simulation for swarms of over 10,000 robots.
Maximizing Energy Battery Efficiency in Swarm Robotics
Jun 05, 2019


Miniaturization and cost, two of the main attractive factors of swarm robotics, have motivated its use as a solution in object collecting tasks, search & rescue missions, and other applications. However, in the current literature only a few papers consider energy allocation efficiency within a swarm. Generally, robots recharge to their maximum level every time unconditionally, and do not incorporate estimates of the energy needed for their next task. In this paper we present an energy efficiency maximization method that minimizes the overall energy cost within a swarm while simultaneously maximizing swarm performance on an object gathering task. The method utilizes dynamic thresholds for upper and lower battery limits. This method has also shown to improve the efficiency of existing energy management methods.
Socially Inspired Communication in Swarm Robotics
Jun 03, 2019

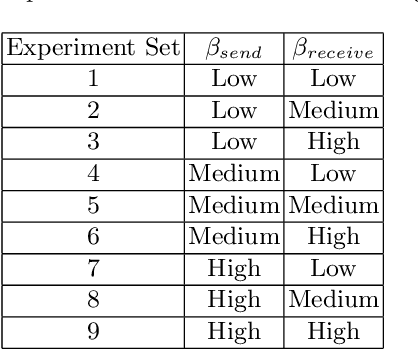
Localized communication in swarms has been shown to increase swarm effectiveness in some situations by allowing for additional opportunities for cooperation. However, communication and utilization of potentially outdated information is also a concern. We present an explicit non-directional goal-based communication model and message accept/reject scheme, and test our model in a set of object gathering experiments with a swarm of robots. The results of the experiments indicate that even low levels of communication regarding the swarm's goal outperform high levels of random information communication.