Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Inspired Communication in Swarm Robotics
Paper and Code

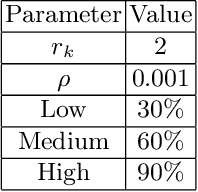

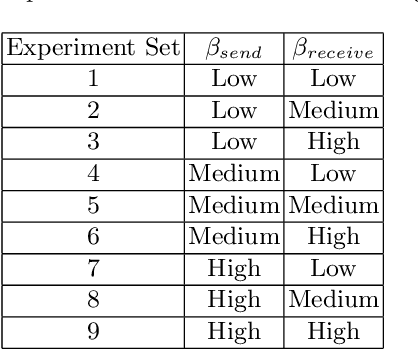
Localized communication in swarms has been shown to increase swarm effectiveness in some situations by allowing for additional opportunities for cooperation. However, communication and utilization of potentially outdated information is also a concern. We present an explicit non-directional goal-based communication model and message accept/reject scheme, and test our model in a set of object gathering experiments with a swarm of robots. The results of the experiments indicate that even low levels of communication regarding the swarm's goal outperform high levels of random information communication.
* ARMS workshop paper for AAMAS conference in Montreal 2019
View paper on