 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing The Limits of Linear Modeling of Non-Linear Swarm Behaviors
Paper and Code

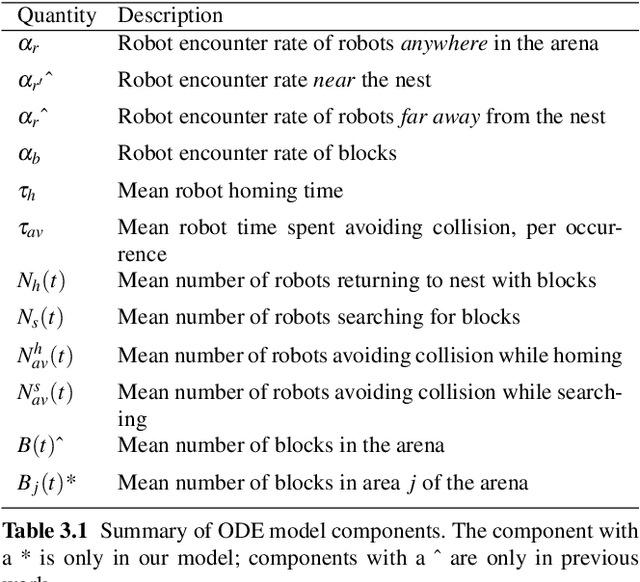


We study the limits of linear modeling of swarm behavior by characterizing the inflection point beyond which linear models of swarm collective behavior break down. The problem we consider is a central place object gathering task. We design a linear model which strives to capture the underlying dynamics of object gathering in robot swarms from first principles, rather than extensively relying on post-hoc model fitting. We evaluate our model with swarms of up to 8,000 robots in simulation, demonstrating that it accurately captures underlying swarm behavioral dynamics when the swarm can be approximated using the mean-field model, and when it cannot, and finite-size effects are present. We further apply our model to swarms exhibiting non-linear behaviors, and show that it still provides accurate predictions in some scenarios, thereby establishing better practical limits on linear modeling of swarm behaviors.