 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Prompt Based Reasoning for Offroad Mapping using Multimodal LLMs
Apr 06, 2026Traditional approaches to off-road autonomy rely on separate models for terrain classification, height estimation, and quantifying slip or slope conditions. Utilizing several models requires training each component separately, having task specific datasets, and fine-tuning. In this work, we present a zero-shot approach leveraging SAM2 for environment segmentation and a vision-language model (VLM) to reason about drivable areas. Our approach involves passing to the VLM both the original image and the segmented image annotated with numeric labels for each mask. The VLM is then prompted to identify which regions, represented by these numeric labels, are drivable. Combined with planning and control modules, this unified framework eliminates the need for explicit terrain-specific models and relies instead on the inherent reasoning capabilities of the VLM. Our approach surpasses state-of-the-art trainable models on high resolution segmentation datasets and enables full stack navigation in our Isaac Sim offroad environment.
Collaborative Last-Mile Delivery: A Multi-Platform Vehicle Routing Problem With En-route Charging
May 29, 2025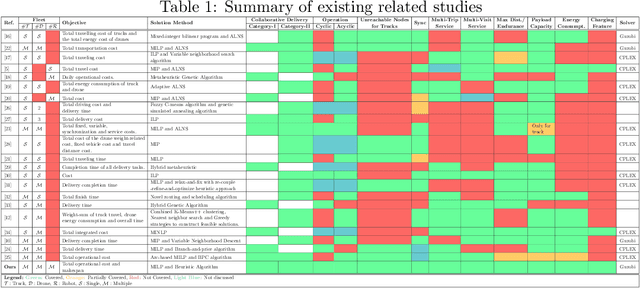
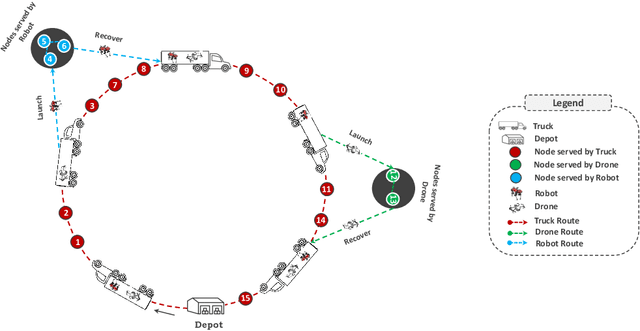

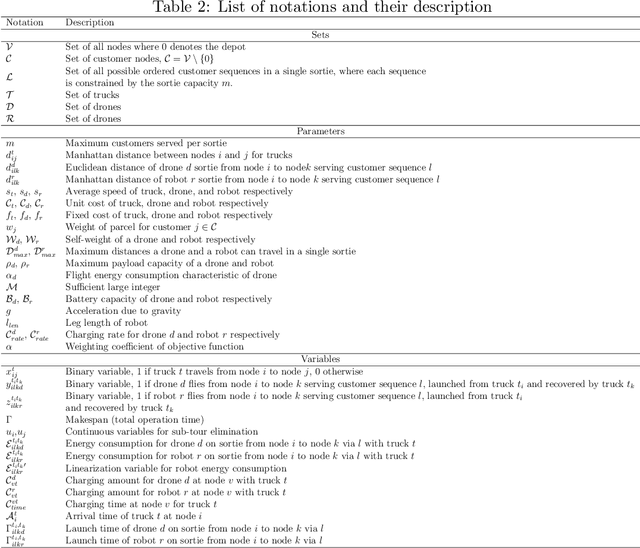
The rapid growth of e-commerce and the increasing demand for timely, cost-effective last-mile delivery have increased interest in collaborative logistics. This research introduces a novel collaborative synchronized multi-platform vehicle routing problem with drones and robots (VRP-DR), where a fleet of $\mathcal{M}$ trucks, $\mathcal{N}$ drones and $\mathcal{K}$ robots, cooperatively delivers parcels. Trucks serve as mobile platforms, enabling the launching, retrieving, and en-route charging of drones and robots, thereby addressing critical limitations such as restricted payload capacities, limited range, and battery constraints. The VRP-DR incorporates five realistic features: (1) multi-visit service per trip, (2) multi-trip operations, (3) flexible docking, allowing returns to the same or different trucks (4) cyclic and acyclic operations, enabling return to the same or different nodes; and (5) en-route charging, enabling drones and robots to recharge while being transported on the truck, maximizing operational efficiency by utilizing idle transit time. The VRP-DR is formulated as a mixed-integer linear program (MILP) to minimize both operational costs and makespan. To overcome the computational challenges of solving large-scale instances, a scalable heuristic algorithm, FINDER (Flexible INtegrated Delivery with Energy Recharge), is developed, to provide efficient, near-optimal solutions. Numerical experiments across various instance sizes evaluate the performance of the MILP and heuristic approaches in terms of solution quality and computation time. The results demonstrate significant time savings of the combined delivery mode over the truck-only mode and substantial cost reductions from enabling multi-visits. The study also provides insights into the effects of en-route charging, docking flexibility, drone count, speed, and payload capacity on system performance.
Towards Accurate State Estimation: Kalman Filter Incorporating Motion Dynamics for 3D Multi-Object Tracking
May 12, 2025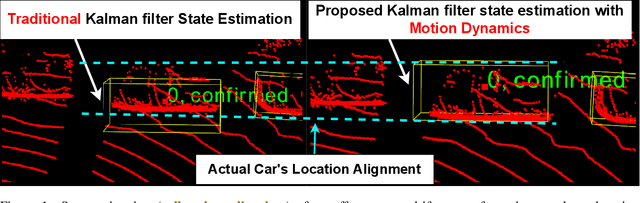
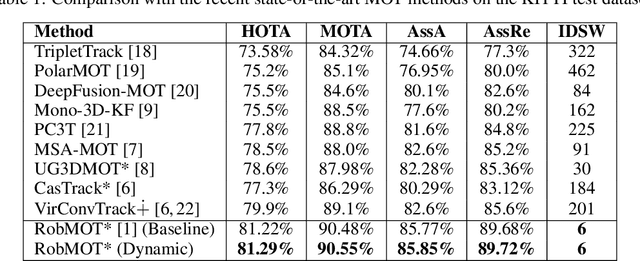
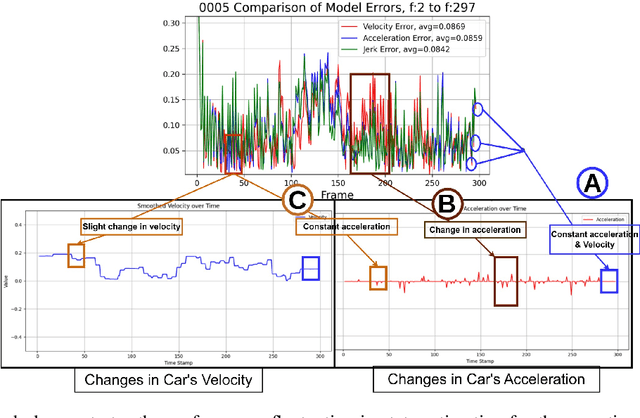
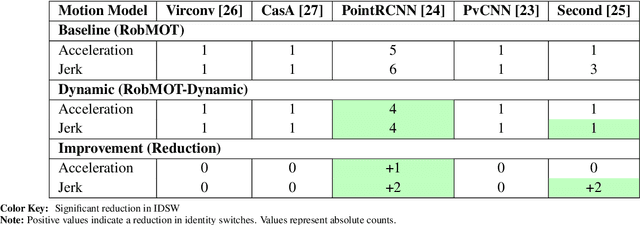
This work addresses the critical lack of precision in state estimation in the Kalman filter for 3D multi-object tracking (MOT) and the ongoing challenge of selecting the appropriate motion model. Existing literature commonly relies on constant motion models for estimating the states of objects, neglecting the complex motion dynamics unique to each object. Consequently, trajectory division and imprecise object localization arise, especially under occlusion conditions. The core of these challenges lies in the limitations of the current Kalman filter formulation, which fails to account for the variability of motion dynamics as objects navigate their environments. This work introduces a novel formulation of the Kalman filter that incorporates motion dynamics, allowing the motion model to adaptively adjust according to changes in the object's movement. The proposed Kalman filter substantially improves state estimation, localization, and trajectory prediction compared to the traditional Kalman filter. This is reflected in tracking performance that surpasses recent benchmarks on the KITTI and Waymo Open Datasets, with margins of 0.56\% and 0.81\% in higher order tracking accuracy (HOTA) and multi-object tracking accuracy (MOTA), respectively. Furthermore, the proposed Kalman filter consistently outperforms the baseline across various detectors. Additionally, it shows an enhanced capability in managing long occlusions compared to the baseline Kalman filter, achieving margins of 1.22\% in higher order tracking accuracy (HOTA) and 1.55\% in multi-object tracking accuracy (MOTA) on the KITTI dataset. The formulation's efficiency is evident, with an additional processing time of only approximately 0.078 ms per frame, ensuring its applicability in real-time applications.
EMT: A Visual Multi-Task Benchmark Dataset for Autonomous Driving in the Arab Gulf Region
Feb 26, 2025

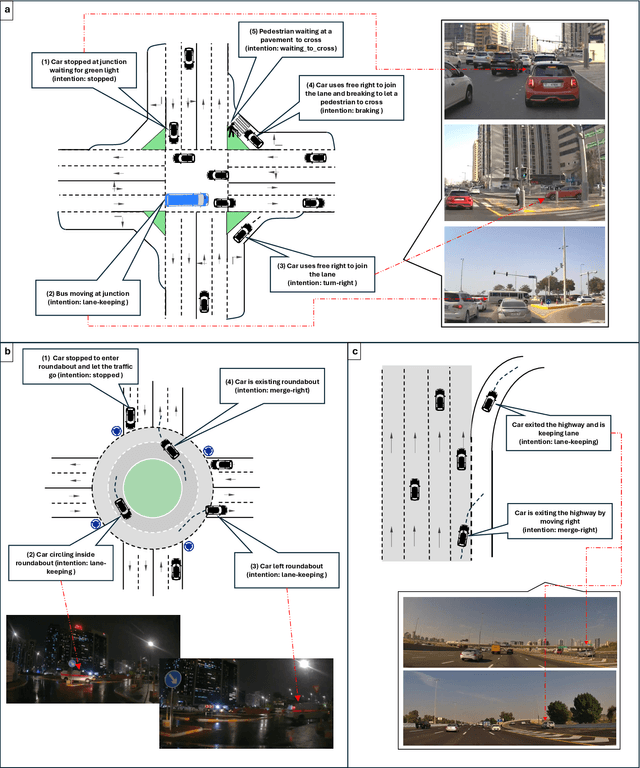
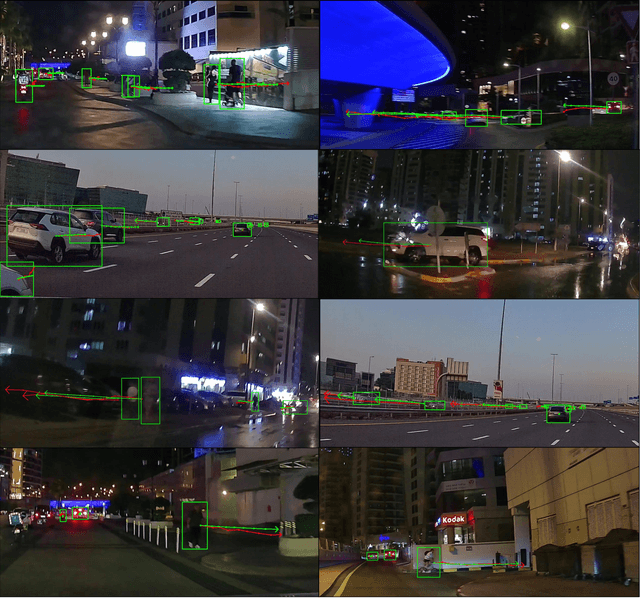
This paper introduces the Emirates Multi-Task (EMT) dataset - the first publicly available dataset for autonomous driving collected in the Arab Gulf region. The EMT dataset captures the unique road topology, high traffic congestion, and distinctive characteristics of the Gulf region, including variations in pedestrian clothing and weather conditions. It contains over 30,000 frames from a dash-camera perspective, along with 570,000 annotated bounding boxes, covering approximately 150 kilometers of driving routes. The EMT dataset supports three primary tasks: tracking, trajectory forecasting and intention prediction. Each benchmark dataset is complemented with corresponding evaluations: (1) multi-agent tracking experiments, focusing on multi-class scenarios and occlusion handling; (2) trajectory forecasting evaluation using deep sequential and interaction-aware models; and (3) intention benchmark experiments conducted for predicting agents intentions from observed trajectories. The dataset is publicly available at https://avlab.io/emt-dataset, and pre-processing scripts along with evaluation models can be accessed at https://github.com/AV-Lab/emt-dataset.
RobMOT: Robust 3D Multi-Object Tracking by Observational Noise and State Estimation Drift Mitigation on LiDAR PointCloud
May 19, 2024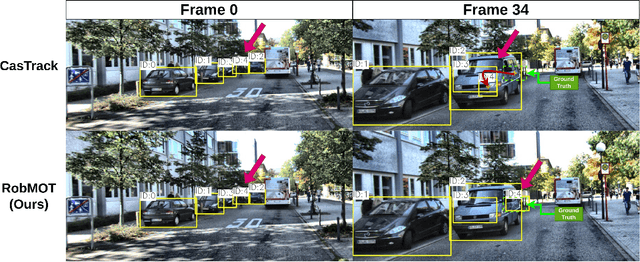
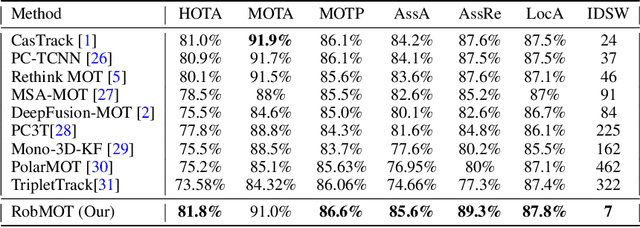
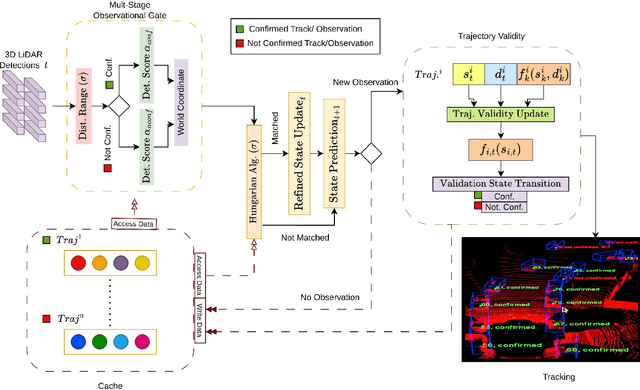
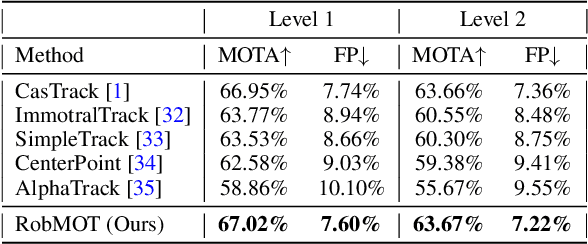
This work addresses the inherited limitations in the current state-of-the-art 3D multi-object tracking (MOT) methods that follow the tracking-by-detection paradigm, notably trajectory estimation drift for long-occluded objects in LiDAR point cloud streams acquired by autonomous cars. In addition, the absence of adequate track legitimacy verification results in ghost track accumulation. To tackle these issues, we introduce a two-fold innovation. Firstly, we propose refinement in Kalman filter that enhances trajectory drift noise mitigation, resulting in more robust state estimation for occluded objects. Secondly, we propose a novel online track validity mechanism to distinguish between legitimate and ghost tracks combined with a multi-stage observational gating process for incoming observations. This mechanism substantially reduces ghost tracks by up to 80\% and improves HOTA by 7\%. Accordingly, we propose an online 3D MOT framework, RobMOT, that demonstrates superior performance over the top-performing state-of-the-art methods, including deep learning approaches, across various detectors with up to 3.28\% margin in MOTA and 2.36\% in HOTA. RobMOT excels under challenging conditions, such as prolonged occlusions and the tracking of distant objects, with up to 59\% enhancement in processing latency.
Towards Autonomous and Safe Last-mile Deliveries with AI-augmented Self-driving Delivery Robots
May 28, 2023



In addition to its crucial impact on customer satisfaction, last-mile delivery (LMD) is notorious for being the most time-consuming and costly stage of the shipping process. Pressing environmental concerns combined with the recent surge of e-commerce sales have sparked renewed interest in automation and electrification of last-mile logistics. To address the hurdles faced by existing robotic couriers, this paper introduces a customer-centric and safety-conscious LMD system for small urban communities based on AI-assisted autonomous delivery robots. The presented framework enables end-to-end automation and optimization of the logistic process while catering for real-world imposed operational uncertainties, clients' preferred time schedules, and safety of pedestrians. To this end, the integrated optimization component is modeled as a robust variant of the Cumulative Capacitated Vehicle Routing Problem with Time Windows, where routes are constructed under uncertain travel times with an objective to minimize the total latency of deliveries (i.e., the overall waiting time of customers, which can negatively affect their satisfaction). We demonstrate the proposed LMD system's utility through real-world trials in a university campus with a single robotic courier. Implementation aspects as well as the findings and practical insights gained from the deployment are discussed in detail. Lastly, we round up the contributions with numerical simulations to investigate the scalability of the developed mathematical formulation with respect to the number of robotic vehicles and customers.
DClEVerNet: Deep Combinatorial Learning for Efficient EV Charging Scheduling in Large-scale Networked Facilities
May 18, 2023



With the electrification of transportation, the rising uptake of electric vehicles (EVs) might stress distribution networks significantly, leaving their performance degraded and stability jeopardized. To accommodate these new loads cost-effectively, modern power grids require coordinated or ``smart'' charging strategies capable of optimizing EV charging scheduling in a scalable and efficient fashion. With this in view, the present work focuses on reservation management programs for large-scale, networked EV charging stations. We formulate a time-coupled binary optimization problem that maximizes EV users' total welfare gain while accounting for the network's available power capacity and stations' occupancy limits. To tackle the problem at scale while retaining high solution quality, a data-driven optimization framework combining techniques from the fields of Deep Learning and Approximation Algorithms is introduced. The framework's key ingredient is a novel input-output processing scheme for neural networks that allows direct extrapolation to problem sizes substantially larger than those included in the training set. Extensive numerical simulations based on synthetic and real-world data traces verify the effectiveness and superiority of the presented approach over two representative scheduling algorithms. Lastly, we round up the contributions by listing several immediate extensions to the proposed framework and outlining the prospects for further exploration.
DFR-FastMOT: Detection Failure Resistant Tracker for Fast Multi-Object Tracking Based on Sensor Fusion
Feb 28, 2023



Persistent multi-object tracking (MOT) allows autonomous vehicles to navigate safely in highly dynamic environments. One of the well-known challenges in MOT is object occlusion when an object becomes unobservant for subsequent frames. The current MOT methods store objects information, like objects' trajectory, in internal memory to recover the objects after occlusions. However, they retain short-term memory to save computational time and avoid slowing down the MOT method. As a result, they lose track of objects in some occlusion scenarios, particularly long ones. In this paper, we propose DFR-FastMOT, a light MOT method that uses data from a camera and LiDAR sensors and relies on an algebraic formulation for object association and fusion. The formulation boosts the computational time and permits long-term memory that tackles more occlusion scenarios. Our method shows outstanding tracking performance over recent learning and non-learning benchmarks with about 3% and 4% margin in MOTA, respectively. Also, we conduct extensive experiments that simulate occlusion phenomena by employing detectors with various distortion levels. The proposed solution enables superior performance under various distortion levels in detection over current state-of-art methods. Our framework processes about 7,763 frames in 1.48 seconds, which is seven times faster than recent benchmarks. The framework will be available at https://github.com/MohamedNagyMostafa/DFR-FastMOT.
Dual Formulation for Chance Constrained Stochastic Shortest Path with Application to Autonomous Vehicle Behavior Planning
Feb 25, 2023



Autonomous vehicles face the problem of optimizing the expected performance of subsequent maneuvers while bounding the risk of collision with surrounding dynamic obstacles. These obstacles, such as agent vehicles, often exhibit stochastic transitions that should be accounted for in a timely and safe manner. The Constrained Stochastic Shortest Path problem (C-SSP) is a formalism for planning in stochastic environments under certain types of operating constraints. While C-SSP allows specifying constraints in the planning problem, it does not allow for bounding the probability of constraint violation, which is desired in safety-critical applications. This work's first contribution is an exact integer linear programming formulation for Chance-constrained SSP (CC-SSP) that attains deterministic policies. Second, a randomized rounding procedure is presented for stochastic policies. Third, we show that the CC-SSP formalism can be generalized to account for constraints that span through multiple time steps. Evaluation results show the usefulness of our approach in benchmark problems compared to existing approaches.
Building Resilience to Out-of-Distribution Visual Data via Input Optimization and Model Finetuning
Nov 29, 2022A major challenge in machine learning is resilience to out-of-distribution data, that is data that exists outside of the distribution of a model's training data. Training is often performed using limited, carefully curated datasets and so when a model is deployed there is often a significant distribution shift as edge cases and anomalies not included in the training data are encountered. To address this, we propose the Input Optimisation Network, an image preprocessing model that learns to optimise input data for a specific target vision model. In this work we investigate several out-of-distribution scenarios in the context of semantic segmentation for autonomous vehicles, comparing an Input Optimisation based solution to existing approaches of finetuning the target model with augmented training data and an adversarially trained preprocessing model. We demonstrate that our approach can enable performance on such data comparable to that of a finetuned model, and subsequently that a combined approach, whereby an input optimization network is optimised to target a finetuned model, delivers superior performance to either method in isolation. Finally, we propose a joint optimisation approach, in which input optimization network and target model are trained simultaneously, which we demonstrate achieves significant further performance gains, particularly in challenging edge-case scenarios. We also demonstrate that our architecture can be reduced to a relatively compact size without a significant performance impact, potentially facilitating real time embedded applications.